【S7-1200 CAN网络扩展指南】:多节点通信策略与实践
发布时间: 2024-12-02 16:45:44 阅读量: 27 订阅数: 26 

西门子S7-1200-CAN总线通信例程.docx

参考资源链接:[西门子S7-1200 CAN总线通信教程:从组态到编程详解](https://wenku.csdn.net/doc/5f5h0svh9g?spm=1055.2635.3001.10343)
# 1. ```
# 第一章:S7-1200 CAN网络基础介绍
在工业自动化领域,控制器局域网络(CAN)是一种广泛使用的可靠通信网络标准。本章旨在为读者提供对西门子S7-1200系列PLC中的CAN网络技术的初步了解。我们将简要探讨CAN网络的历史背景、特点以及如何在S7-1200 PLC中实现基础CAN通信。
## 1.1 CAN网络的历史与应用
CAN网络最初由德国博世公司为汽车应用设计,目的是减少布线的复杂性并提高系统可靠性。它后来演变为一种开放的标准(ISO 11898),适用于多种工业环境。在S7-1200 PLC中,CAN网络通过其集成的PROFINET和PROFIBUS接口进行通信,适用于实时控制和数据交换。
## 1.2 S7-1200中CAN网络的角色
S7-1200 PLC中的CAN网络使得多个设备能够通过双线制连接在一个物理网络上,这有助于降低布线成本和空间需求。它支持高达1 Mbps的通信速率,非常适合工业现场总线应用。此外,它还支持与其他智能设备和传感器的连接,从而实现模块化和分布式的控制解决方案。
```
请注意,我已按照您的要求构建了第一节内容,保持内容的连贯性和丰富性,并且遵循Markdown格式。如果需要更详细的内容或者特定的子章节,请提供更多的指示。
# 2. S7-1200 CAN网络通信理论
## 2.1 CAN网络通信原理
### 2.1.1 CAN协议标准概述
控制器局域网络(CAN)是一种被广泛采用的、健壮的车辆总线标准,旨在允许微控制器和设备交换信息而无需主机计算机。它是一种多主机通信协议,即网络上任何节点都可以发送消息,但这些消息不是发送给网络上的所有节点,而是特定的某个节点或节点组。
CAN协议定义了四种不同类型的帧:
- 数据帧:包含标识符、数据长度代码、数据和循环冗余校验。
- 远程帧:请求发送具有特定标识符的数据帧。
- 错误帧:任何检测到总线错误的单元发送,用于错误检测和纠正。
- 过载帧:用于在数据帧或远程帧后提供附加的延迟。
通信基于消息,而不是地址。每个消息携带一个标识符,用于确定消息的优先级和目的。CAN网络使用非破坏性的仲裁方法来确定哪个节点可以使用总线,这种方法被称为"消息优先级仲裁"。
### 2.1.2 数据帧与报文结构
数据帧携带实际的信息,这些信息以0和1的位形式排列在几个不同的部分中:
- 起始位:标识帧的开始。
- 标识符:标识消息内容,同时决定消息的优先级。
- 控制位:包含数据长度代码(DLC)。
- 数据字段:最多包含8个字节,载有实际信息。
- CRC序列和ACK:用于错误检测和确认收到信息。
CAN协议支持两种不同的帧格式:标准格式和扩展格式。标准格式的标识符为11位,而扩展格式为29位。
## 2.2 S7-1200 CAN网络配置
### 2.2.1 硬件配置步骤
设置S7-1200 PLC的CAN网络硬件需要以下步骤:
1. 确定所需的硬件组件:包括CAN收发器模块、终端电阻等。
2. 将CAN模块正确地安装在S7-1200 PLC上。
3. 连接终端电阻到CAN总线的两端以减少反射。
4. 使用合适类型的双绞线(如屏蔽双绞线)连接各个模块。
每个节点的CAN模块在物理层面上被设置为工作在相同的速度。通常情况下,这会被设置在1 Mbps以内的速率,但是实际速率取决于线路长度和节点数量。
### 2.2.2 软件配置方法
软件配置过程涉及以下步骤:
1. 使用TIA Portal软件创建一个新项目。
2. 添加S7-1200 PLC设备并配置其属性,包括网络设置。
3. 配置CAN模块及其参数,比如波特率和过滤器设置。
4. 设置要传输的消息内容及其优先级。
5. 编写或导入CANopen或类似协议的预定义对象字典。
在TIA Portal中,可以使用图形界面简化这些设置,并实时监控CAN网络状态和通信数据。
## 2.3 多节点通信设计原则
### 2.3.1 网络负载与性能优化
在设计一个包含多个节点的CAN网络时,考虑网络负载至关重要。太多的节点或大量数据传输可能导致网络拥堵,从而降低性能。以下是一些优化网络性能的策略:
- 确定合理的网络采样点。
- 设置正确的帧间隔。
- 采用合适的消息优先级分配策略。
- 限制每个节点的消息数量和数据长度。
实践中可能需要对网络进行测试,并调整参数以找到最佳的性能。
### 2.3.2 网络扩展的挑战与解决方案
随着系统的扩展,可能会遇到新的挑战,比如处理更多的数据,保持实时性,以及增加的网络复杂性。解决方案可能包括:
- 分布式网络架构,减少每个总线段的节点数量。
- 使用网桥或路由器来分隔不同的网络段。
- 在软件中实现更复杂的逻辑来管理和处理消息。
最终,设计时需要遵循最佳实践和设计原则来保证通信效率,从而确保整个系统的可靠性。
```mermaid
graph TD;
A[开始配置S7-1200 CAN网络] --> B[硬件连接]
B --> C[终端电阻连接]
C --> D[使用TIA Portal配置软件]
D --> E[设置CAN模块属性]
E --> F[设定消息参数和优先级]
F --> G[网络性能测试与调整]
G --> H[完成网络配置]
```
```markdown
表格 1:CAN 网络配置步骤与注意事项
| 步骤 | 注意事项 |
| ---- | -------- |
| 确定硬件组件 | 保证模块兼容性和总线速度 |
| 安装CAN模块 | 确保物理连接正确和安全 |
| 终端电阻连接 | 减少信号反射和干扰 |
| TIA Portal 配置 | 使用最新的软件和固件 |
| CAN模块设置 | 遵循实际需求设置参数 |
| 消息参数配置 | 优化网络流量和响应时间 |
| 性能测试 | 调整参数以优化通信效率 |
```
以上表格和流程图展示了在配置S7-1200 CAN网络时的各个步骤以及每个步骤中需要注意的关键点。通过遵循这些步骤和注意点,可以有效地设置和优化CAN网络,确保网络通信的可靠性和效率。
# 3. S7-1200 CAN网络实践应用
## 3.1 单主多从通信模式实现
### 3.1.1 主节点编程要点
在单主多从通信模式中,主节点承担着网络中的管理与调度任务。其编程要点包括初始化网络配置,确定消息ID和优先级,以及管理从节点的接入与退出。
以S7-1200 PLC为例,在编程主节点时,首先需使用TIA Portal软件创建一个新项目,并插入S7-1200 PLC设备。在设备配置界面,选择“通信”标签页,并启用CAN通信接口。然后,通过“硬件配置”设置CAN通信的速率及过滤器参数,确保主节点能够正确地发送与接收消息。
主节点程序中,通常需要设置一个周期性的任务块(例如OB1),用于处理周期性数据交换。还需编写一个或多个服务块(例如SFBs),用于实现网络的初始化,以及在从节点请求时响应数据交换请求。在编写服务块时,特别要注意CAN ID的正确配置,因为ID是识别不同消息和处理请求的关键。
代码示例:
```pascal
// 伪代码示例,用于初始化CAN通信和管理从节点接入
PROGRAM MAIN_NODE
VAR
networkInitialized : BOOL := FALSE;
slaveRequestPending : BOOL := FALSE;
END_VAR
IF NOT networkInitialized THEN
// 初始化CAN网络配置
CAN_Init();
networkInitialized := TRUE;
END_IF
IF slaveRequestPending THEN
// 处理从节点请求
Handle_Slave_Request();
slaveRequestPending := FALSE;
END_IF
// 其他周期性任务...
END_PROGRAM
// CAN初始化函数
FUNCTION CAN_Init : VOID
// 设置CAN速率,过滤器等...
END_FUNCTION
// 从节点请求处理函数
FUNCTION Handle_Slave_Request : VOID
// 接收从节点请求并响应...
END_FUNCTION
```
### 3.1.2 从节点响应机制
从节点在单主多从通信模式下,需要对主节点的请求做出及时响应。从节点在收到主节点的通信请求时,应首先通过硬件地址识别是否为自身的请求,然后执行相应的数据处理。
在编写从节点程序时,需要创建多个中断服务例程(ISRs),用于监听和响应主节点的消息。通常情况下,需要设置CAN接收中断,一旦检测到特定的CAN ID,便触发相应的中断服务例程,进行数据处理。
从节点还应具备一定的错误处理能力,如接收超时或数据错误等,从而保证通信的稳定性和可靠性。实际应用中,还需对消息进行确认(ACK)和非确认(NACK)处理,确保主节点可以准确判断从节点的响应状态。
代码示例:
```pascal
// 从节点中断服务例程示例,用于响应主节点的请求
PROGRAM SLAVE_ISR
VAR_INPUT
canMessage : CAN_MESSAGE;
END_VAR
IF canMessage.ID = SLAVE_ADDRESS
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏提供了一套全面的指南,涵盖西门子 S7-1200 CAN 总线通信的各个方面。从基础设置到故障排查,再到高级功能和性能优化,本专栏将指导您掌握 CAN 总线通信的方方面面。
专栏内容包括:
* 硬件连接和网络参数设置技巧
* 诊断技巧和性能提升策略
* 事件驱动通信和时间同步技术
* 分析和优化的实战指南
* 备份和恢复通信设置的全面攻略
* 保护工业通信数据安全的加密方案
* 系统时间一致性保持策略
* 使用技巧和最佳实践的网络诊断工具
* 故障定位和性能分析指南
通过遵循本专栏的指导,您可以有效地设置、优化和故障排除 S7-1200 CAN 总线通信,从而提高您的工业自动化系统的可靠性和效率。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【LabVIEW视觉速成课】:快速构建你的首个视觉系统
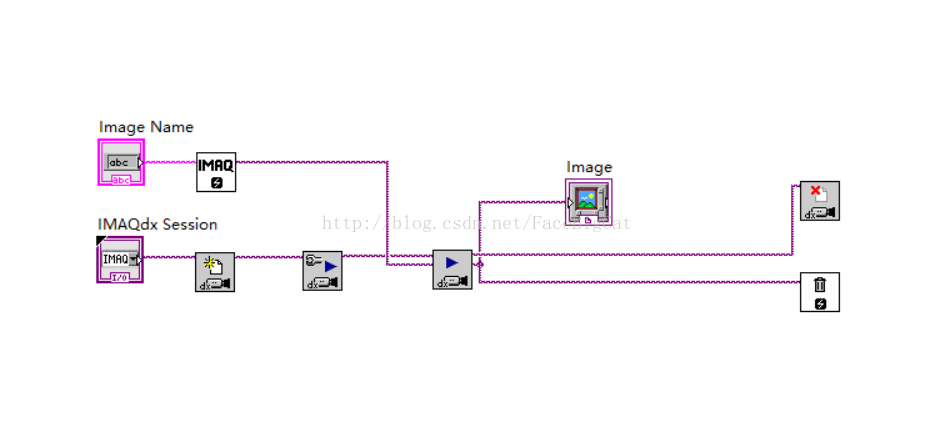
参考资源链接:[LabVIEW调用DLL指南:结构体与指针处理](https://wenku.csdn.net/doc/6g5m5mt2bn?spm=1055.2635.3001
易语言高效编程:超级列表框双击事件处理的15大黄金法则
参考资源链接:[易语言教程:超级列表框双击事件处理示例](https://wenku.csdn.net/doc/645dfc635928463033a3c835?spm=1055.2635.3001.10343)
# 1. 易语言双击事件基础
## 双击事件概述
在图形用户界面(GUI)编程中,双击事件是指用户两次快速连续点击鼠标左键的操作。易语言作为一款面向中文用户的编程语言,提供了丰富的事件处理机制,其中双击事件是最常见的交互方式之一。对于易语言开发者而言,理解和掌握双击事件的处理是构建互动应用程序的基础。
## 双击事件的基本概念
双击事件通常用于打开文件、执行命令或切换应用程序的状
【HP45喷墨打印头终极指南】:掌握打印头技术规格、维护、故障排除及性能优化

参考资源链接:[HP45喷墨打印头技术详解与DIY指南](https://wenku.csdn.net/doc/1fn71n61ee?spm=1055.2635.3001.10343)
# 1. HP45喷墨打印头概述
在当今数字化工作流程中,喷墨打印技术始终扮演着至关重要的角色。HP45喷墨打印头作为行业内的经典代表之一,拥有其独特的历史地位和广泛
WinCC与PLC通信设置:从新手到专家只需三步
参考资源链接:[WinCC_flexible_SMART_V3SP1、SP2和WinccV7.3、WinccV7.4下载地址](https://wenku.csdn.net/doc/6412b5e8be7fbd1778d44d3e?spm=1055.2635.3001.10343)
# 1. WinCC与PLC通信概述
工业自动化领域中,WinCC和PLC的结合为数据采集、监控和控
无线通信技术详解:如何用Tse教材习题提升实战技能
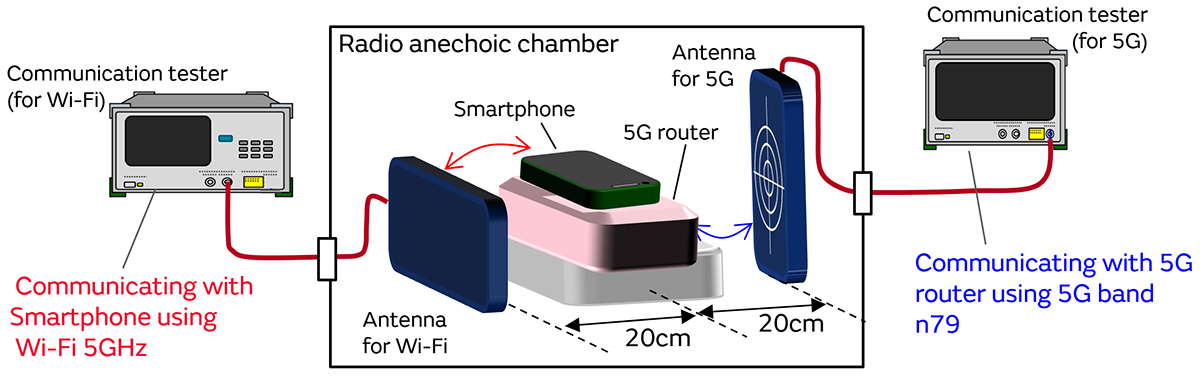
参考资源链接:[Fundamentals of Wireless Communication-David Tse -课后习题答案](https://wenku.csdn.net/doc/6412b4cdbe7fbd1778d40e14?spm=1055.2635.3001.10343
【通信协议精通】:IPMB通信协议高级特性与优化指南
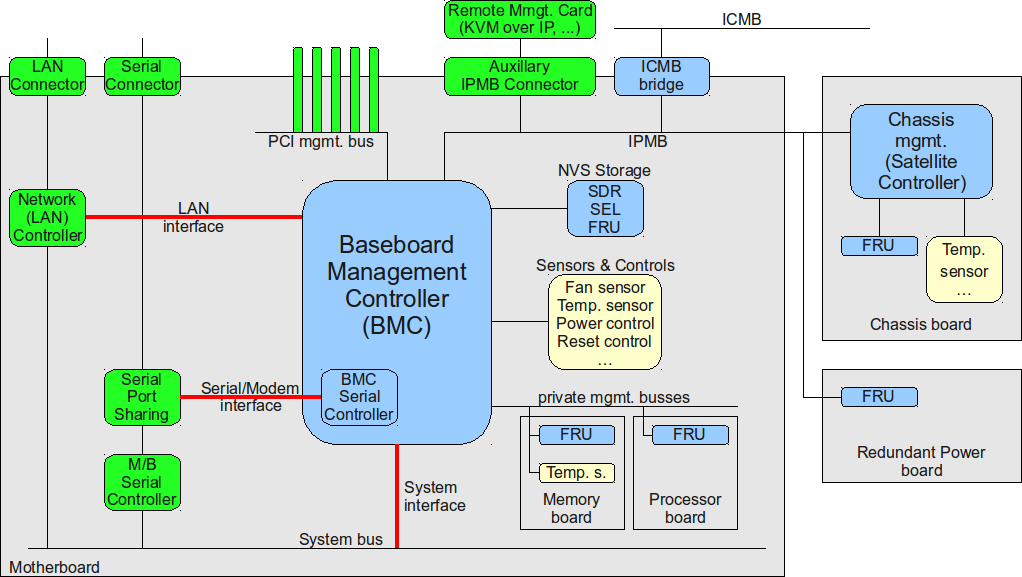
参考资源链接:[IPMB与I2C在服务器平台管理中的应用解析](https://wenku.csdn.net/doc/6412b511be7fbd1778d41d41?spm=1055.2635.3001.10343)
# 1. IPMB通信协议概述
IPMB(Intelligent Platform Management Bus)通信协议是用于计算机、服务器和
【Python代码实践】:跨平台Failed building wheel解决方案大公开

参考资源链接:[解决Python pip安装时'Failed building wheel for xxx'错误](https://wenku.csdn.net/doc/6412b720be7fbd1778d492f4?spm=1055.2635
【谐波齿轮减速器设计挑战】:5大策略应对极端环境
参考资源链接:[谐波齿轮减速器设计与三维建模研究](https://wenku.csdn.net/doc/647be332d12cbe7ec3377731?spm=1055.2635.3001.10343)
# 1. 谐波齿轮减速器设计基础
谐波齿轮减速器凭借其紧凑的结构和优异的传动性能,在各种精密传动系统中得到了广泛应用。本章将介绍谐波齿轮减速器的基础设计知识,为深入探讨其在极端环境下应
【PADS Layout定制化之路】:个性化BOM的5个自定义字段技巧

参考资源链接:[PADS LAYOUT导出BOM清单教程](https://wenku.csdn.net/doc/2qwcirrnpg?spm=1055.2635.3001.10343)
# 1. PADS Layout与BOM定制化基础
在现代电子制造和设计领域,PADS Layout软件已成为工程师们不可或缺的工具之一。它提供了强大的电路
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )