PID调控在电机控制系统中的实战秘籍:原理、调参及常见问题解决
发布时间: 2024-07-12 09:27:23 阅读量: 681 订阅数: 79 

电机的PID控制
# 1. PID调控的基本原理**
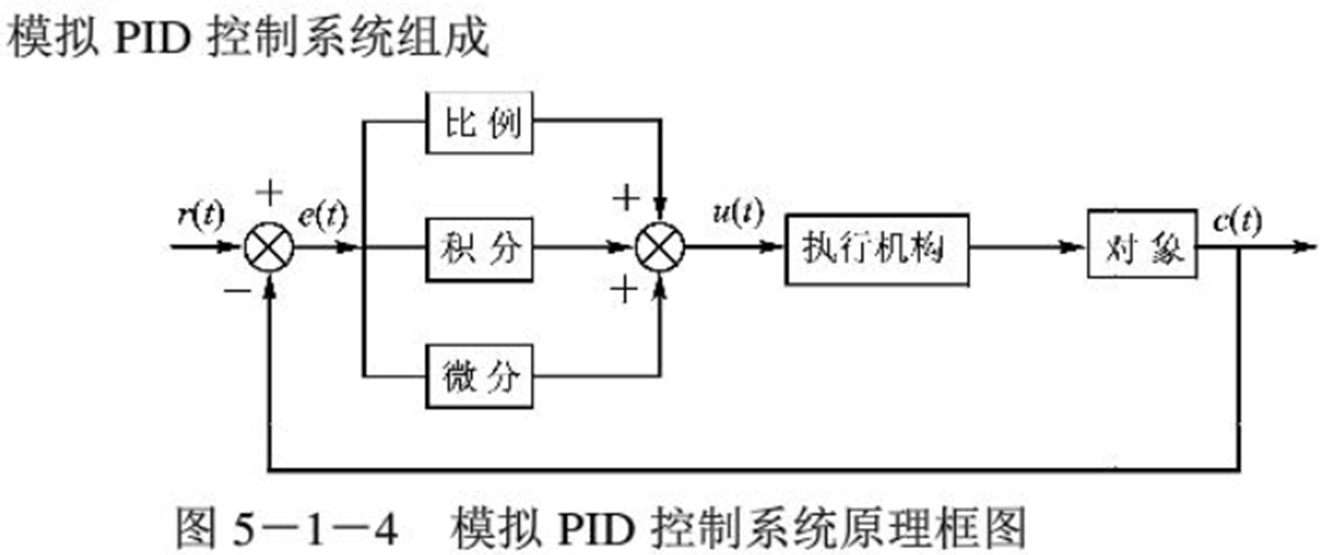
PID调控(比例-积分-微分)是一种广泛应用于工业控制领域的经典反馈控制算法。其基本原理是通过测量被控对象的实际输出值与期望值之间的偏差,并根据偏差的比例、积分和微分值,计算出控制器的输出,进而调整被控对象的输入,实现对被控对象的控制。
PID调控器的数学模型如下:
```
u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt
```
其中:
* u(t)为控制器的输出
* e(t)为偏差,即实际输出值与期望值之差
* Kp为比例系数
* Ki为积分系数
* Kd为微分系数
# 2. PID调控在电机控制系统中的应用
### 2.1 PID调控的结构和参数
PID调控器是一种反馈控制系统,其结构如下图所示:
```mermaid
graph LR
subgraph PID控制器
A[设定值] --> |+
B[测量值] --> |-
C[误差] --> |+
D[比例环节] --> |+
E[积分环节] --> |+
F[微分环节] --> |+
G[输出] --> |+
end
subgraph 电机控制系统
H[PID控制器输出] --> |+
I[电机] --> |+
J[测量值] --> |+
end
```
PID调控器的参数包括比例系数Kp、积分系数Ki和微分系数Kd。这些参数决定了调控器的性能。
- **比例系数Kp:**Kp越大,系统的响应越快,但容易出现超调和震荡。
- **积分系数Ki:**Ki越大,系统的稳态误差越小,但响应速度越慢。
- **微分系数Kd:**Kd越大,系统的抗干扰能力越强,但容易导致系统不稳定。
### 2.2 PID参数的调校方法
PID参数的调校是至关重要的,它直接影响系统的控制效果。常用的调校方法有:
#### 2.2.1 Ziegler-Nichols方法
Ziegler-Nichols方法是一种基于系统阶跃响应的调校方法。具体步骤如下:
1. 将PID控制器设置为纯比例控制(Ki=Kd=0)。
2. 逐渐增大Kp,直到系统出现持续振荡。
3. 记录此时Kp的值为Kp_u。
4. 将Kp设置为Kp_u/2,Ki设置为Kp_u/8,Kd设置为Kp_u/16。
#### 2.2.2 Cohen-Coon方法
Cohen-Coon方法是一种基于系统时域响应的调校方法。具体步骤如下:
1. 将PID控制器设置为纯比例控制(Ki=Kd=0)。
2. 逐渐增大Kp,直到系统出现持续振荡。
3. 记录此时Kp的值为Kp_u,振荡周期为T。
4. 将Kp设置为Kp_u/2.2,Ki设置为Kp_u/1.2T,Kd设置为Kp_uT/8。
#### 2.2.3 试差法
试差法是一种基于经验的调校方法。具体步骤如下:
1. 根据经验设置初始参数。
2. 观察系统的响应,并根据响应情况调整参数。
3. 重复步骤2,直到系统达到满意的控制效果。
### 2.3 PID调控的仿真和实验
PID调控的仿真和实验可以帮助验证调控器的性能。常用的仿真工具有MATLAB/Simulink、LabVIEW等。
实验平台可以是实际的电机控制系统,也可以是搭建的仿真平台。通过仿真和实验,可以验证调控器的参数设置是否合理,并对系统进行优化。
**代码块:**
```python
import numpy as np
import matplotlib.pyplot as plt
# 系统参数
J = 0.01 # 转动惯量(kg·m^2)
b = 0.001 # 阻尼系数(N·m·s/rad)
K = 0.1 # 电机转矩常数(N·m/A)
# PID参数
Kp = 10
Ki = 1
Kd = 0.1
# 仿真时间
t = np.linspace(0, 10, 1000)
# 输入信号
u = np.ones(len(t))
# 系统状态
x = np.zeros((2, len(t))) # [位置,速度]
# 仿真
for i in range(1, len(t)):
# 计算误差
e = u[i] - x[0, i-1]
# 计算PID输出
u_pid = Kp * e + Ki * np.sum(e) * t[i] + Kd * (e - e[i-1]) / (t[i] - t[i-1])
# 计算系统状态
x[0, i] = x[0, i-1] + x[1, i-1] * (t[i] - t[i-1])
x[1, i] = x[1, i-1] + (u_pid - b * x[1, i-1]) / J * (t[i] - t[i-1])
# 绘图
plt.plot(t, x[0, :], label='位置')
plt.plot(t, x[1, :], label='速度')
plt.legend()
plt.show()
```
**逻辑分析:**
这段代码模拟了PID调控器控制电机转动的过程。
- `Kp`、`Ki`、`Kd`为PID参数。
- `J`、`b`、`K`为电机参数。
- `u`为输入信号。
- `x`为系统状态,包括位置和速度。
- 循环中,计算误差、PID输出,并更新系统状态。
- 最后,绘制位置和速度的曲线。
# 3. PID调控的常见问题及解决方法
### 3.1 震荡问题
#### 3.1.1 原因分析
震荡问题是指PID控制系统输出信号出现持续的周期性振荡,其主要原因有:
- **比例增益过大:**过大的比例增益会使系统对误差的响应过于激烈,导致输出信号过度补偿,产生振荡。
- **积分时间过短:**积分时间过短会导致系统对误差的积分作用不够,无法消除稳态误差,从而产生持续的振荡。
- **微分时间过长:**微分时间过长会使系统对误差变化的预测过于敏感,导致输出信号出现过冲和振荡。
#### 3.1.2 解决方法
解决震荡问题的方法主要有:
- **降低比例增益:**适当降低比例增益可以减弱系统对误差的响应强度,从而减少振荡。
- **增加积分时间:**增加积分时间可以增强系统对误差的积分作用,消除稳态误差,从而抑制振荡。
- **缩短微分时间:**缩短微分时间可以降低系统对误差变化的预测敏感性,减少过冲和振荡。
### 3.2 超调问题
#### 3.2.1 原因分析
超调问题是指PID控制系统输出信号在达到稳态值之前出现过冲,其主要原因有:
- **比例增益过大:**过大的比例增益会导致系统对误差的响应过于激烈,导致输出信号过冲。
- **积分时间过短:**积分时间过短会导致系统对误差的积分作用不够,无法及时消除过冲。
#### 3.2.2 解决方法
解决超调问题的方法主要有:
- **降低比例增益:**适当降低比例增益可以减弱系统对误差的响应强度,从而减少过冲。
- **增加积分时间:**增加积分时间可以增强系统对误差的积分作用,及时消除过冲。
### 3.3 响应慢问题
#### 3.3.1 原因分析
响应慢问题是指PID控制系统输出信号对误差的响应速度较慢,其主要原因有:
- **比例增益过小:**过小的比例增益会导致系统对误差的响应强度不足,导致输出信号响应慢。
- **积分时间过长:**积分时间过长会导致系统对误差的积分作用过强,导致输出信号响应缓慢。
- **微分时间过短:**微分时间过短会导致系统对误差变化的预测不够充分,导致输出信号响应迟钝。
#### 3.3.2 解决方法
解决响应慢问题的方法主要有:
- **增加比例增益:**适当增加比例增益可以增强系统对误差的响应强度,从而加快输出信号的响应速度。
- **缩短积分时间:**缩短积分时间可以减弱系统对误差的积分作用,加快输出信号的响应速度。
- **增加微分时间:**增加微分时间可以增强系统对误差变化的预测能力,加快输出信号的响应速度。
# 4. PID调控在电机控制系统中的实战案例
### 4.1 直流电机控制
#### 4.1.1 系统模型
直流电机的系统模型可以表示为:
```
J * d^2θ/dt^2 + B * dθ/dt + K * θ = T
```
其中:
* J 为转动惯量
* B 为阻尼系数
* K 为电机扭矩常数
* θ 为转角
* T 为输入扭矩
#### 4.1.2 PID调控器的设计和实现
对于直流电机控制,PID调控器的设计目标是将电机的实际转角跟踪到期望转角。
**PID调控器的结构:**
```
u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt
```
其中:
* u(t) 为控制输出(输入扭矩)
* e(t) 为误差(期望转角 - 实际转角)
* Kp 为比例增益
* Ki 为积分增益
* Kd 为微分增益
**PID参数的调校:**
PID参数的调校方法有多种,常用的方法有:
* **Ziegler-Nichols方法:**
* 将PID调控器切换到P控制模式,逐步增大Kp,直到系统出现持续振荡。
* 记录振荡周期T,并计算Kp、Ki、Kd:
* Kp = 0.45 * Kp_osc
* Ki = 0.5 * Kp_osc / T
* Kd = 0.125 * Kp_osc * T
* **Cohen-Coon方法:**
* 根据系统的上升时间Tu、峰值时间Tp、峰值增益Kv,计算PID参数:
* Kp = 0.6 * Kv / (Tu * Tp)
* Ki = 1.2 * Kp / Tu
* Kd = 0.075 * Kp * Tu
**PID调控器的实现:**
PID调控器可以采用数字实现或模拟实现。
**数字实现:**
```python
def pid_control(e, dt):
"""
PID控制算法
Args:
e: 误差
dt: 采样时间
Returns:
控制输出
"""
# 计算积分项
integral = self.integral + e * dt
# 计算微分项
derivative = (e - self.previous_error) / dt
# 更新误差
self.previous_error = e
# 计算控制输出
output = self.kp * e + self.ki * integral + self.kd * derivative
return output
```
**模拟实现:**
```
R1 = 10k
R2 = 10k
C1 = 1uF
C2 = 1uF
Opamp = LM358
# 连接电路
# ...
def pid_control(e):
"""
PID控制算法
Args:
e: 误差
Returns:
控制输出
"""
# 计算积分项
integral = Opamp.output * C1 / C2
# 计算微分项
derivative = (e - Opamp.input_minus) / R1
# 计算控制输出
output = Opamp.output + (e * R2 + integral * R1 + derivative * C1)
return output
```
### 4.2 步进电机控制
#### 4.2.1 系统模型
步进电机的系统模型可以表示为:
```
J * d^2θ/dt^2 + B * dθ/dt + K * sin(θ) = T
```
其中:
* J 为转动惯量
* B 为阻尼系数
* K 为电机扭矩常数
* θ 为转角
* T 为输入扭矩
#### 4.2.2 PID调控器的设计和实现
对于步进电机控制,PID调控器的设计目标是将电机的实际转角跟踪到期望转角。
**PID调控器的结构:**
```
u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt
```
其中:
* u(t) 为控制输出(输入扭矩)
* e(t) 为误差(期望转角 - 实际转角)
* Kp 为比例增益
* Ki 为积分增益
* Kd 为微分增益
**PID参数的调校:**
PID参数的调校方法有多种,常用的方法有:
* **Ziegler-Nichols方法:**
* 将PID调控器切换到P控制模式,逐步增大Kp,直到系统出现持续振荡。
* 记录振荡周期T,并计算Kp、Ki、Kd:
* Kp = 0.45 * Kp_osc
* Ki = 0.5 * Kp_osc / T
* Kd = 0.125 * Kp_osc * T
* **Cohen-Coon方法:**
* 根据系统的上升时间Tu、峰值时间Tp、峰值增益Kv,计算PID参数:
* Kp = 0.6 * Kv / (Tu * Tp)
* Ki = 1.2 * Kp / Tu
* Kd = 0.075 * Kp * Tu
**PID调控器的实现:**
PID调控器可以采用数字实现或模拟实现。
**数字实现:**
```python
def pid_control(e, dt):
"""
PID控制算法
Args:
e: 误差
dt: 采样时间
Returns:
控制输出
"""
# 计算积分项
integral = self.integral + e * dt
# 计算微分项
derivative = (e - self.previous_error) / dt
# 更新误差
self.previous_error = e
# 计算控制输出
output = self.kp * e + self.ki * integral + self.kd * derivative
return output
```
**模拟实现:**
```
R1 = 10k
R2 = 10k
C1 = 1uF
C2 = 1uF
Opamp = LM358
# 连接电路
# ...
def pid_control(e):
"""
PID控制算法
Args:
e: 误差
Returns:
控制输出
"""
# 计算积分项
integral = Opamp.output * C1 / C2
# 计算微分项
derivative = (e - Opamp.input_minus) / R1
# 计算控制输出
output = Opamp.output + (e * R2 + integral * R1 + derivative * C1)
return output
```
# 5. PID调控的优化方法
### 5.1 模糊PID调控
模糊PID调控是一种将模糊逻辑应用于PID调控的方法。它通过将输入变量(误差和误差变化率)模糊化,然后根据模糊规则库进行推理,得到模糊输出,再将模糊输出解模糊化得到PID参数。
**优点:**
* 鲁棒性强,对系统参数变化不敏感
* 能够处理非线性系统
* 易于实现和调试
**缺点:**
* 规则库的建立需要专家经验
* 规则库的规模可能很大,导致计算量大
### 5.2 神经网络PID调控
神经网络PID调控是一种将神经网络应用于PID调控的方法。它通过训练神经网络模型来学习PID参数的最佳值。
**优点:**
* 能够自适应调整PID参数,适应系统参数变化
* 能够处理复杂非线性系统
* 鲁棒性强
**缺点:**
* 训练神经网络模型需要大量数据和时间
* 模型的泛化能力可能受限
### 5.3 自适应PID调控
自适应PID调控是一种能够自动调整PID参数以适应系统变化的方法。它通过在线估计系统参数,然后根据估计值调整PID参数。
**优点:**
* 能够实时调整PID参数,适应系统参数变化
* 鲁棒性强,能够处理非线性系统和时变系统
* 减少了手动调参的工作量
**缺点:**
* 算法复杂度较高,实现难度大
* 需要对系统进行建模和参数估计
**代码示例:**
```python
import numpy as np
import matplotlib.pyplot as plt
# 定义系统模型
plant = tf.TransferFunction([1], [1, 2, 1])
# 定义PID控制器
pid = tf.PID(Kp=1, Ki=0.1, Kd=0.01)
# 仿真PID控制系统
t, y = tf.step(pid + plant, T=10)
# 绘制仿真结果
plt.plot(t, y)
plt.show()
```
**逻辑分析:**
* `tf.TransferFunction`类用于定义系统模型,其中分子和分母分别表示分母和分子多项式。
* `tf.PID`类用于定义PID控制器,其中`Kp`、`Ki`和`Kd`分别表示比例增益、积分增益和微分增益。
* `tf.step`函数用于仿真系统响应阶跃输入。
* `plt.plot`函数用于绘制仿真结果。
# 6. PID调控在电机控制系统中的应用前景**
PID调控在电机控制系统中有着广泛的应用前景,未来将继续在以下几个方面得到深入发展:
- **智能化调参:**随着人工智能技术的发展,PID调参将变得更加智能化。基于机器学习算法的自动调参方法将成为主流,可以根据系统特性和运行数据自动优化PID参数,提高控制性能。
- **自适应控制:**自适应PID调控器可以根据系统参数和环境变化自动调整PID参数,从而提高系统的鲁棒性和适应性。自适应PID调控器将成为电机控制系统中关键技术,特别是对于具有非线性、时变或不确定性的系统。
- **多变量控制:**电机控制系统往往涉及多个变量,如速度、位置和转矩。多变量PID调控器可以同时控制多个变量,实现更好的系统性能。多变量PID调控器将成为复杂电机控制系统中不可或缺的技术。
- **分布式控制:**随着电机控制系统规模的不断扩大,分布式控制架构将成为主流。分布式PID调控器可以将控制任务分配到多个分布式节点,提高系统的可扩展性和可靠性。分布式PID调控器将成为大型电机控制系统中的关键技术。
- **云计算和物联网:**云计算和物联网技术将为PID调控带来新的机遇。基于云端的PID调控器可以实现远程监控、数据分析和参数优化,提高系统的运维效率和控制性能。云计算和物联网技术将成为PID调控发展的助推器。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
“电机与控制”专栏深入探讨电机控制系统的各个方面,提供全面的故障诊断、PID调控、传感器技术、电磁兼容性、建模与仿真、实时控制、能效优化、故障预测、工业互联网、云计算、大数据分析、能源管理、系统集成、项目管理和风险管理等领域的专业知识。通过深入剖析故障类型、提供调参秘籍、揭秘传感器原理、分析干扰源、分享建模方法、阐述实时控制原理、优化能效策略、介绍故障预测技术、探讨工业互联网应用、分析云计算架构、挖掘大数据价值、优化能源管理、分享系统集成经验、提供项目管理方法和识别风险策略,该专栏旨在帮助读者掌握电机控制系统的核心技术,提升其设计、开发和维护能力。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【MATLAB C4.5算法性能提升秘籍】:代码优化与内存管理技巧

# 摘要
本论文首先概述了MATLAB中C4.5算法的基础知识及其在数据挖掘领域的应用。随后,探讨了MATLAB代码优化的基础,包括代码效率原理、算法性能评估以及优化技巧。深入分析了MATLAB内存管理的原理和优化方法,重点介绍了内存泄漏的检测与预防
【稳定性与混沌的平衡】:李雅普诺夫指数在杜芬系统动力学中的应用

# 摘要
本文旨在介绍杜芬系统的概念与动力学基础,深入分析李雅普诺夫指数的理论和计算方法,并探讨其在杜芬系统动力学行为和稳定性分析中的应用。首先,本文回顾了杜芬系统的动力学基础,并对李雅普诺夫指数进行了详尽的理论探讨,包括其定义、性质以及在动力系统中的角色。
QZXing在零售业中的应用:专家分享商品快速识别与管理的秘诀

# 摘要
QZXing作为一种先进的条码识别技术,在零售业中扮演着至关重要的角色。本文全面探讨了QZXing在零售业中的基本概念、作用以及实际应用。通过对QZXing原理的阐述,展示了其在商品快速识别中的核心技术优势,例如二维码识别技术及其在不同商品上的应用案例。同时,分析了QZXing在提高商品识别速度和零售效率方面的实际效果
【AI环境优化高级教程】:Win10 x64系统TensorFlow配置不再难

# 摘要
本文详细探讨了在Win10 x64系统上安装和配置TensorFlow环境的全过程,包括基础安装、深度环境配置、高级特性应用、性能调优以及对未来AI技术趋势的展望。首先,文章介绍了如何选择合适的Python版本以及管理虚拟环境,接着深入讲解了GPU加速配置和内存优化。在高级特性应用
【宇电温控仪516P故障解决速查手册】:快速定位与修复常见问题

# 摘要
本文全面介绍了宇电温控仪516P的功能特点、故障诊断的理论基础与实践技巧,以及常见故障的快速定位方法。文章首先概述了516P的硬件与软件功能,然后着重阐述了故障诊断的基础理论,包括故障的分类、系统分析原理及检测技术,并分享了故障定位的步骤和诊断工具的使用方法。针对516P的常见问题,如温度显示异常、控制输出不准确和通讯故障等,本文提供了详尽的排查流程和案例分析,并探讨了电气组件和软件故障的修复方法。此外
【文化变革的动力】:如何通过EFQM模型在IT领域实现文化转型
# 摘要
EFQM模型是一种被广泛认可的卓越管理框架,其在IT领域的适用性与实践成为当前管理创新的重要议题。本文首先概述了EFQM模型的核心理论框架,包括五大理念、九个基本原则和持续改进的方法论,并探讨了该模型在IT领域的具体实践案例。随后,文章分析了EFQM模型如何在IT企业文化中推动创新、强化团队合作以及培养领导力和员工发展。最后,本文研究了在多样化
RS485系统集成实战:多节点环境中电阻值选择的智慧
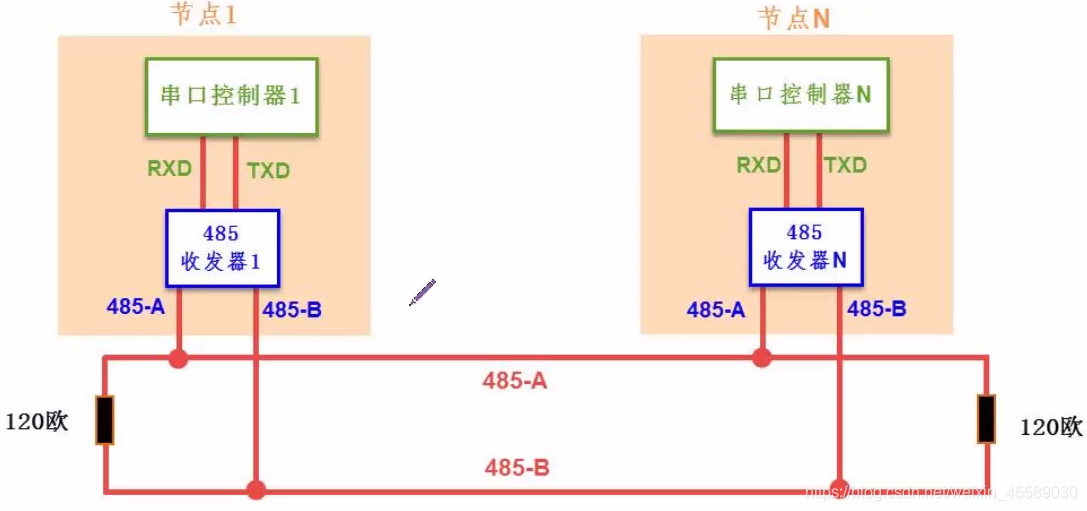
# 摘要
本文系统性地探讨了RS485系统集成的基础知识,深入解析了RS485通信协议,并分析了多节点RS485系统设计中的关键原则。文章
【高级电磁模拟】:矩量法在复杂结构分析中的决定性作用
# 摘要
本文全面介绍了电磁模拟与矩量法的基础理论及其应用。首先,概述了矩量法的基本概念及其理论基础,包括电磁场方程和数学原理,随后深入探讨了积分方程及其离散化过程。文章着重分析了矩量法在处理多层介质、散射问题及电磁兼容性(EMC)方面的应用,并通过实例展示了其在复杂结构分析中的优势。此外,本文详细阐述了矩量法数值模拟实践,包括模拟软件的选用和模拟流程,并对实际案例
SRIO Gen2在云服务中的角色:云端数据高效传输技术深度支持

# 摘要
本文旨在深入探讨SRIO Gen2技术在现代云服务基础架构中的应用与实践。首先,文章概述了SRIO Gen2的技术原理,及其相较于传统IO技术的显著优势。然后,文章详细分析了SRIO Gen2在云服务中尤其是在数据中心的应用场景,并提供了实际案例研
先农熵在食品质量控制的重要性:确保食品安全的科学方法

# 摘要
本文深入探讨了食品质量控制的基本原则与重要性,并引入先农熵理论,阐述其科学定义、数学基础以及与热力学第二定律的关系。通过对先农熵在食品稳定性和保质期预测方面作用的分析,详细介绍了先农熵测量技术及其在原料质量评估、加工过程控制和成品质量监控中的应用。进一步,本文探讨了先农熵与其他质量控制方法的结合,以及其在创新食品保存技术和食品安全法规标准中的应用。最后,通过案例分析,总结了先农熵在食品质量控制中
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )