OpenCV与Python版本在云计算中的应用:版本选择与可扩展性,解锁云端价值
发布时间: 2024-08-11 02:58:18 阅读量: 70 订阅数: 142 

OpenCV4Python官方中文文档(OpenCVPythonTutorials)高清pdf完整版最新版本

# 1. OpenCV与Python版本概述
OpenCV(Open Source Computer Vision Library)是一个开源计算机视觉库,提供广泛的算法和函数,用于图像处理、计算机视觉和机器学习任务。它与Python编程语言紧密集成,使开发人员能够轻松构建和部署计算机视觉应用程序。
OpenCV的Python版本提供了以下优势:
- **易用性:**Python是一种高级语言,具有简洁的语法和广泛的库,使开发人员能够快速构建应用程序。
- **灵活性:**Python允许动态类型化和解释执行,使开发人员能够快速迭代和修改代码。
- **社区支持:**Python拥有一个庞大且活跃的社区,提供广泛的资源和支持。
# 2. OpenCV与Python版本在云计算中的应用场景
### 2.1 图像处理与分析
#### 2.1.1 图像增强
**应用场景:**图像增强技术广泛应用于图像预处理、图像修复和图像增强等领域。
**代码示例:**
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 调整亮度和对比度
image = cv2.convertScaleAbs(image, alpha=1.5, beta=20)
# 显示增强后的图像
cv2.imshow('Enhanced Image', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.convertScaleAbs()` 函数用于调整图像的亮度和对比度。
* `alpha` 参数控制图像的亮度,值越大,图像越亮。
* `beta` 参数控制图像的对比度,值越大,图像的对比度越高。
#### 2.1.2 图像分割
**应用场景:**图像分割技术用于将图像分割成不同的区域或对象,广泛应用于医学影像分析、目标检测和图像编辑等领域。
**代码示例:**
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 使用 K-Means 聚类进行图像分割
num_clusters = 3
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 10, 1.0)
flags = cv2.KMEANS_RANDOM_CENTERS
_, labels, centers = cv2.kmeans(image.reshape(-1, 3), num_clusters, None, criteria, 10, flags)
segmented_image = centers[labels.flatten()]
# 显示分割后的图像
cv2.imshow('Segmented Image', segmented_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.kmeans()` 函数用于对图像像素进行 K-Means 聚类。
* `num_clusters` 参数指定聚类的数量。
* `criteria` 参数指定聚类终止条件。
* `segmented_image` 变量存储分割后的图像。
### 2.2 计算机视觉
#### 2.2.1 物体检测
**应用场景:**物体检测技术用于从图像中识别和定位对象,广泛应用于安防监控、自动驾驶和工业检测等领域。
**代码示例:**
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 使用 YOLOv3 进行物体检测
net = cv2.dnn.readNet('yolov3.weights', 'yolov3.cfg')
classes = ['person', 'bicycle', 'car', 'motorcycle', 'bus', 'truck']
# 设置输入图像尺寸
blob = cv2.dnn.blobFromImage(image, 1 / 255.0, (416, 416), (0, 0, 0), swapRB=True, crop=False)
net.setInput(blob)
# 执行前向传播
detections = net.forward()
# 处理检测结果
for detection in detections[0, 0]:
score = float(detection[2])
if score > 0.5:
left, top, right, bottom = detection[3:7] * np.array([image.shape[1], image.shape[0], image.shape[1], image.shape[0]])
cv2.rectangle(image, (int(left), int(top)
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 OpenCV 与 Python 版本之间的兼容性和性能影响。它提供了详细的版本对照表,阐明了版本选择和兼容性矩阵。专栏还分析了 OpenCV 图像处理、计算机视觉算法和图像识别准确率在不同 Python 版本下的性能差异。此外,它还提供了 OpenCV 与 Python 版本升级指南、不兼容问题排查和解决方案,以及版本选择策略和优化技巧。通过深入的研究和案例分析,本专栏旨在帮助开发人员优化 OpenCV 和 Python 版本,以释放性能潜力,并避免在计算机视觉、机器学习、医学图像分析、自动驾驶、无人机图像处理、机器人视觉、边缘计算和云计算等应用中遇到的陷阱。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
台达触摸屏宏编程:入门到精通的21天速成指南

# 摘要
本文系统地介绍了台达触摸屏宏编程的全面知识体系,从基础环境设置到高级应用实践,为触摸屏编程提供了详尽的指导。首先概述了宏编程的概念和触摸屏环境的搭建,然后深入探讨了宏编程语言的基础知识、宏指令和控制逻辑的实现。接下来,文章介绍了宏编程实践中的输入输出操作、数据处理以及与外部设备的交互技巧。进阶应用部分覆盖了高级功能开发、与PLC的通信以及故障诊断与调试。最后,通过项目案例实战,展现了如何将理论知识应用
信号完整性不再难:FET1.1设计实践揭秘如何在QFP48 MTT中实现

# 摘要
本文综合探讨了信号完整性在高速电路设计中的基础理论及应用。首先介绍信号完整性核心概念和关键影响因素,然后着重分析QFP48封装对信号完整性的作用及其在MTT技术中的应用。文中进一步探讨了FET1.1设计方法论及其在QFP48封装设计中的实践和优化策略。通过案例研究,本文展示了FET1.1在实际工程应用中的效果,并总结了相关设计经验。最后,文章展望了FET
【MATLAB M_map地图投影选择】:理论与实践的完美结合
:no_upscale()/cdn.vox-cdn.com/uploads/chorus_asset/file/3470884/1024px-Robinson_projection_SW.0.jpg)
# 摘要
M_map工具包是一种在MATLAB环境下使用的地图投影软件,提供了丰富的地图投影方法与定制选项,用
打造数据驱动决策:Proton-WMS报表自定义与分析教程
# 摘要
本文旨在全面介绍Proton-WMS报表系统的设计、自定义、实践操作、深入应用以及优化与系统集成。首先概述了报表系统的基本概念和架构,随后详细探讨了报表自定义的理论基础与实际操作,包括报表的设计理论、结构解析、参数与过滤器的配置。第三章深入到报表的实践操作,包括创建过程中的模板选择、字段格式设置、样式与交互设计,以及数据钻取与切片分析的技术。第四章讨论了报表分析的高级方法,如何进行大数据分析,以及报表的自动化
【DELPHI图像旋转技术深度解析】:从理论到实践的12个关键点

# 摘要
图像旋转是数字图像处理领域的一项关键技术,它在图像分析和编辑中扮演着重要角色。本文详细介绍了图像旋转技术的基本概念、数学原理、算法实现,以及在特定软件环境(如DELPHI)中的应用。通过对二维图像变换、旋转角度和中心以及插值方法的分析
RM69330 vs 竞争对手:深度对比分析与最佳应用场景揭秘

# 摘要
本文全面比较了RM69330与市场上其它竞争产品,深入分析了RM69330的技术规格和功能特性。通过核心性能参数对比、功能特性分析以及兼容性和生态系统支持的探讨,本文揭示了RM69330在多个行业中的应用潜力,包括消费电子、工业自动化和医疗健康设备。行业案例与应用场景分析部分着重探讨了RM69330在实际使用中的表现和效益。文章还对RM69330的市场表现进行了评估,并提供了应
无线信号信噪比(SNR)测试:揭示信号质量的秘密武器!
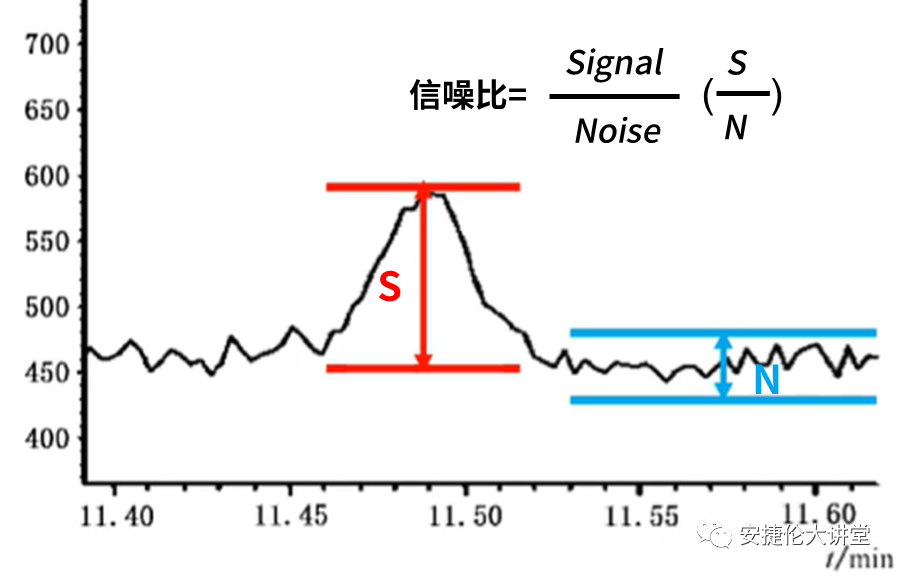
# 摘要
无线信号信噪比(SNR)是衡量无线通信系统性能的关键参数,直接影响信号质量和系统容量。本文系统地介绍了SNR的基础理论、测量技术和测试实践,探讨了SNR与无线通信系统性能的关联,特别是在天线设计和5G技术中的应用。通过分析实际测试案例,本文阐述了信噪比测试在无线网络优化中的重要作用,并对信噪比测试未来的技术发展趋势和挑战进行
【UML图表深度应用】:Rose工具拓展与现代UML工具的兼容性探索
# 摘要
本文系统地介绍了统一建模语言(UML)图表的理论基础及其在软件工程中的重要性,并对经典的Rose工具与现代UML工具进行了深入探讨和比较。文章首先回顾了UML图表的理论基础,强调了其在软件设计中的核心作用。接着,重点分析了Rose工具的安装、配置、操作以及在UML图表设计中的应用。随后,本文转向现代UML工具,阐释其在设计和配置方面的
台达PLC与HMI整合之道:WPLSoft界面设计与数据交互秘笈
# 摘要
本文旨在提供台达PLC与HMI交互的深入指南,涵盖了从基础界面设计到高级功能实现的全面内容。首先介绍了WPLSoft界面设计的基础知识,包括界面元素的创建与布局以及动态数据的绑定和显示。随后深入探讨了WPLSoft的高级界面功能,如人机交互元素的应用、数据库与HMI的数据交互以及脚本与事件驱动编程。第四章重点介绍了PLC与HMI之间的数据交互进阶知识,包括PLC程序设计基础、
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )