【电机控制稳定性:带宽的重要性】:探索带宽对系统稳定性的影响
发布时间: 2024-12-15 09:12:40 阅读量: 2 订阅数: 4 

了解IMU带宽及其在系统稳定性中的应用
参考资源链接:[永磁同步电机电流与转速环带宽计算详解](https://wenku.csdn.net/doc/nood6mjd91?spm=1055.2635.3001.10343)
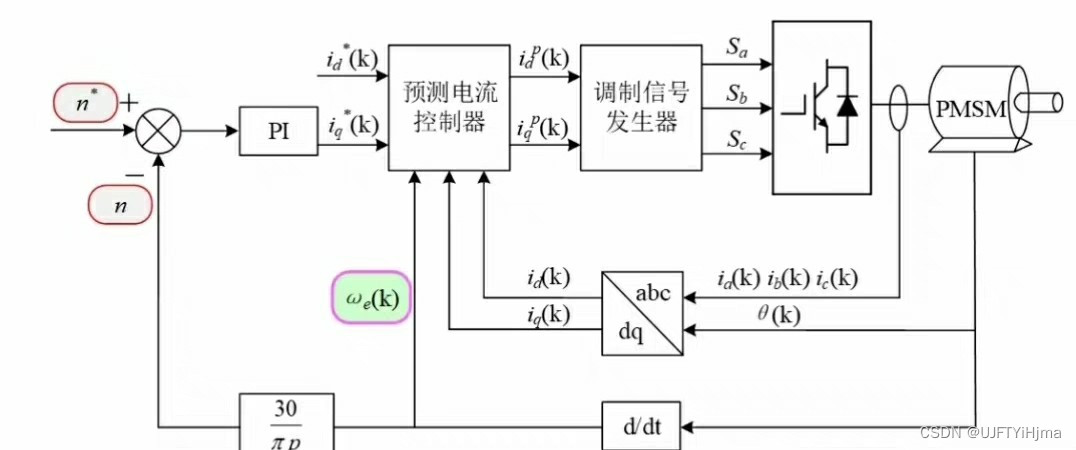
# 1. 电机控制系统概述
电机控制系统是现代工业自动化的基石,广泛应用于伺服驱动、机器人、航空航天等领域。它通过精确控制电机的速度、位置和扭矩来完成特定任务。从简单的开环系统到复杂的闭环反馈系统,电机控制技术已发展成为一门集电力电子、控制理论、计算机科学和机械工程于一体的综合技术。
## 1.1 系统组成
电机控制系统通常包括电机、传感器、控制器和执行器。电机是执行机械能转换的关键部件;传感器用于反馈系统的运行状态,例如转速和位置;控制器处理传感器信号并生成控制指令;执行器(如驱动器)则根据指令调整电机的工作。
## 1.2 控制策略
在电机控制中,常见的控制策略有开环控制、闭环控制(反馈控制)、自适应控制和智能控制等。开环控制不依赖反馈信息,而闭环控制则使用传感器反馈来调整控制输出,实现高精度控制。自适应控制可以自动调整系统参数以适应变化的工作条件,而智能控制策略如模糊控制和神经网络控制则引入了人工智能,以处理更加复杂和动态的控制问题。
电机控制系统的发展正朝着更高的效率、精度和智能性的方向前进,这无疑对控制系统的设计、实施和维护提出了更高的要求。
# 2. 带宽的理论基础
### 2.1 频域分析简介
在控制系统中,频域分析提供了一个理解系统如何响应不同频率信号的方法。在这一节中,我们首先探讨频域与时域的关系,接着定义带宽在频域中的作用。
#### 2.1.1 频域与时域的关系
频域分析是控制系统设计中的一个重要工具,它允许工程师研究系统对不同频率输入信号的响应。频域与时域之间的关系由傅里叶变换来描述,这是一种将时间信号转换为频率信号的数学方法。在时间域中观察到的时变信号,可以在频域中分析为不同频率分量的组合。频域分析可以让我们直接了解系统的频率特性,这在控制系统的稳定性和性能分析中至关重要。
频域分析和时域分析提供了不同的视角来分析信号和系统。时域分析侧重于信号的时间行为,如上升时间、过冲和稳态误差等指标。相比之下,频域分析侧重于信号的频率内容及其对系统的影响。这种分析方法特别适用于那些其性能在很大程度上取决于其对不同频率信号响应的系统,如滤波器、放大器和控制系统。
#### 2.1.2 带宽在频域中的定义
带宽是描述一个系统频率响应范围的术语,它指的是系统可以有效响应的频率范围。在电气工程中,带宽通常以赫兹(Hz)为单位,并定义为系统增益下降到其最大增益的-3dB(大约减少到最大增益的70.7%)时的频率范围。
在控制系统中,带宽是衡量系统快速响应能力的一个重要参数。一个具有较宽带宽的系统意味着它可以处理更高频率的输入变化而不失真。换句话说,带宽越宽,系统对快速变化的输入信号的响应能力越强。然而,带宽并非越宽越好,因为过于宽的带宽可能导致噪声放大和系统稳定性问题。
带宽的测量通常涉及到频率响应函数(FRF)的确定。FRF通常通过传递函数或频率响应测试获得,它可以提供系统对于一系列不同频率输入的响应幅度和相位信息。FRF图是一种展示系统频率特性的有用工具,它包括幅度响应曲线和相位响应曲线。
### 2.2 控制系统的响应特性
控制系统的基本响应特性通常通过冲激响应和阶跃响应来描述。这些响应特性对于理解系统的稳定性和性能至关重要。
#### 2.2.1 冲激响应和阶跃响应
冲激响应是系统对冲激函数(一个无限大、持续时间无限短的信号)的响应。冲激函数的概念虽然在物理上不可实现,但在数学和理论分析中非常有用。通过分析系统对冲激输入的响应,我们可以得到系统的自然频率、阻尼比以及其他动态特性。
阶跃响应是指系统对阶跃函数输入的响应。阶跃函数是一种突然从零跃升到某一非零值的信号。阶跃响应能够显示系统的稳态误差、上升时间和过冲等特性。这些特性是评估系统是否满足性能指标的重要依据。
分析冲激响应和阶跃响应时,通常会采用拉普拉斯变换和Z变换来简化复杂数学计算。这些变换允许我们在复数域内进行运算,并且通过解析的方法来获取系统的时间响应特性。
#### 2.2.2 系统稳定性的频域准则
系统稳定性是控制系统设计的首要目标。频域中的系统稳定性准则依赖于开环传递函数的频域特性。一个系统如果满足Bode稳定性准则,则在开环条件下是稳定的。
这些准则包括相位裕度(PM)和增益裕度(GM)。相位裕度是指系统相位响应在-180度交叉频率点的额外相位,而增益裕度是指在相位达到-180度时开环增益可以增加的最大值而不失稳。一般来说,较大的相位和增益裕度预示着系统有更好的稳定性和鲁棒性。
频域稳定性分析的另一种方法是奈奎斯特稳定准则。通过绘制开环频率响应在复平面上的奈奎斯特图,可以直观地判断系统是否稳定。如果奈奎斯特图不包围-1点,则系统稳定;否则,系统不稳定。
### 2.3 带宽对系统性能的影响
带宽在控制系统设计中起着核心作用,它直接影响系统的快速性和稳定性。
#### 2.3.1 带宽与系统快速性
带宽决定了系统处理快速变化信号的能力。一个高带宽的系统,理论上能够以较高的频率响应输入信号的变化,从而实现更快的动态响应。例如,一个电机控制器如果具有较宽的带宽,它能够更快地调整电机速度以响应负载变化。
在实际应用中,过窄的带宽会限制系统对高频变化的响应能力。相反,过于宽的带宽则可能导致系统对噪声过于敏感。因此,在设计控制系统时,需要在快速性和抗干扰性之间寻求平衡。
带宽对系统快速性的影响可以通过系统的脉冲和阶跃响应直观地看出。一个具有较宽带宽的系统将拥有更快的上升时间、较少的振荡和更短的稳定时间。
#### 2.3.2 带宽与系统稳定性
虽然带宽与系统的快速性紧密相关,但带宽的增加并不是无限制的。带宽的增加往往伴随着系统稳定性的下降。这是因为一个系统在处理快速变化的信号时,其相位滞后会增加,这可能会导致系统的反馈环路失去稳定性。
系统稳定性与带宽之间的关系可以通过系统开环和闭环频率响应来分析。例如,当带宽增加时,如果系统的相位滞后超过了系统的相位裕度,系统将变得不稳定。因此,控制系统设计者必须在提高带宽以获得更好的快速性的同时,确保系统的稳定裕度不受到损害。
带宽的适当选择取决于系统要求的快速性、稳定性和抗干扰能力之间的平衡。在实际应用中,这通常涉及到对系统进行反复的建模、测试和调整。
通过对带宽与系统性能之间关系的深入理解,工程师可以更加精确地设计出既能快速响应变化,又能保持稳定性的电机控制系统。
# 3. 电机控制中的带宽测量
## 3.1 带宽测量的基本方法
### 3.1.1 频率响应测试
在电机控制领域,了解系统对不同频率信号的响应能力是至关重要的。频率响应测试是评估电机控制系统带宽的一个基础方法。通过施加一个已知频率的正弦波信号作为输入,测量电机控制系统的输出,可以获得系统对特定频率信号的增益和相位响应。
频率响应测试通常需要一个信号发生器来产生正弦波信号,一个功率放大器来驱动电机,以及一个数据采集系统来记录电机的速度或位置响应。通过改变输入信号的频率,可以绘制出整个频率范围内的增益和相位响应曲线,这通常被称为伯德图(Bode Plot)。
### 3.1.2 扫频技术与Bode图
Bode图是一种将系统增益(以分贝为单位)和相位随频率变化的关系以图形化方式表示出来的工具。它为分析系统的稳定性和带宽提供了直观的视觉辅助。
为了得到准确的Bode图,通常会使用扫频技术。在扫频测试中,输入信号的频率会从一个起始频率线性增加到终止频率。通过这一方法,可以同时获得系统在不同频率下的增益和相位响应。
实现Bode图的扫频测试通常涉及以下步骤:
1. 配置信号发生器以产生一个扫频信号。
2. 将此信号输入到电机控制系统。
3. 利用数据采集系统记录输出信号。
4. 通过专门的软件来分析记录的数据,并绘制Bode图。
```python
# 示例代码:使用Python进行简单的频率响应分析
import numpy as np
import matplotlib.pyplot as plt
from scipy.signal import lti, freqresp
# 创建一个传递函数模型
numerator = [0.05] # 分子系数,代表增益
denominator = [1, 1, 0.05] # 分母系数,代表系统特性
sys = lt
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《永磁同步电机:20年经验的终极指南》是一部全面的指南,深入探讨了永磁同步电机的性能和应用。它涵盖了电机控制的各个方面,包括电流环和转速环控制策略、带宽计算、电机参数测量、仿真软件应用和抗扰动分析。该指南提供了对电机控制系统设计和优化的深入理解,对于希望提高电机性能和效率的工程师和研究人员来说是必读之作。通过深入剖析电流环和转速环的带宽设计策略,该指南帮助读者掌握电机控制的精髓,并为设计高性能、稳定且高效的电机系统提供切实可行的见解。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
揭示Tetgen算法原理:从理论到实践的精髓
参考资源链接:[tetgen中文指南:四面体网格生成与优化](https://wenku.csdn.net/doc/77v5j4n744?spm=1055.2635.3001.10343)
# 1. Tetgen算法概述
## 1.1 Tetgen算法简介
Tetgen是一个用于三维网格生成的软件包,它能够将复杂几何模型转换为高质量的四面体网格。该算法在科学和工程领域中具有广泛的应用,特别是在有限元分析(FEA)和计算流体动力学(CFD)等领域。Tetgen的核心优势在于其能够处理具有复杂边界的几何体,并在生成的网格中保持一致性与精确性。
## 1.2 算法的发展与应用背景
Tetgen算
【Python模块导入机制深度解析】:掌握PYTHONPATH与模块搜索的秘诀
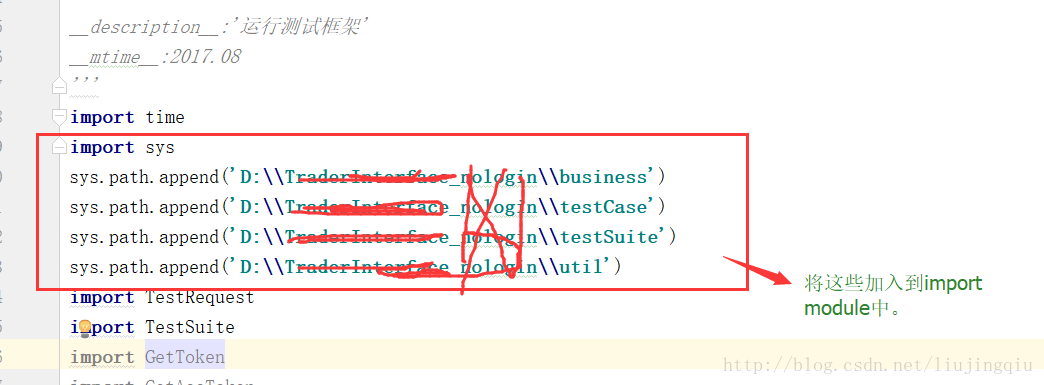
参考资源链接:[pycharm运行出现ImportError:No module named的解决方法](https://wenku.csdn.ne
【UDEC模型构建全流程】:手把手教你从零开始
参考资源链接:[UDEC中文详解:初学者快速入门指南](https://wenku.csdn.net/doc/5fdi050ses?spm=1055.2635.3001.10343)
# 1. UDEC模型基础介绍
## 1.1 UDEC模型概述
UDEC(Universal Distinct Element Code)是一款应用离散元方法模拟岩土体应力-应变行为的计算软件。它能够模拟岩土材料的裂纹生长、块体运动和整体稳定性,是工程岩土、采矿及地质灾害分析中不可或缺的数值分析工具。
## 1.2 UDEC模型的应用范围
UDEC广泛应用于岩土工程的各个领域,包括但不限于矿山开采、岩体稳
印刷色彩管理秘籍:中英文术语对照与调色技巧(颜色大师的秘密)
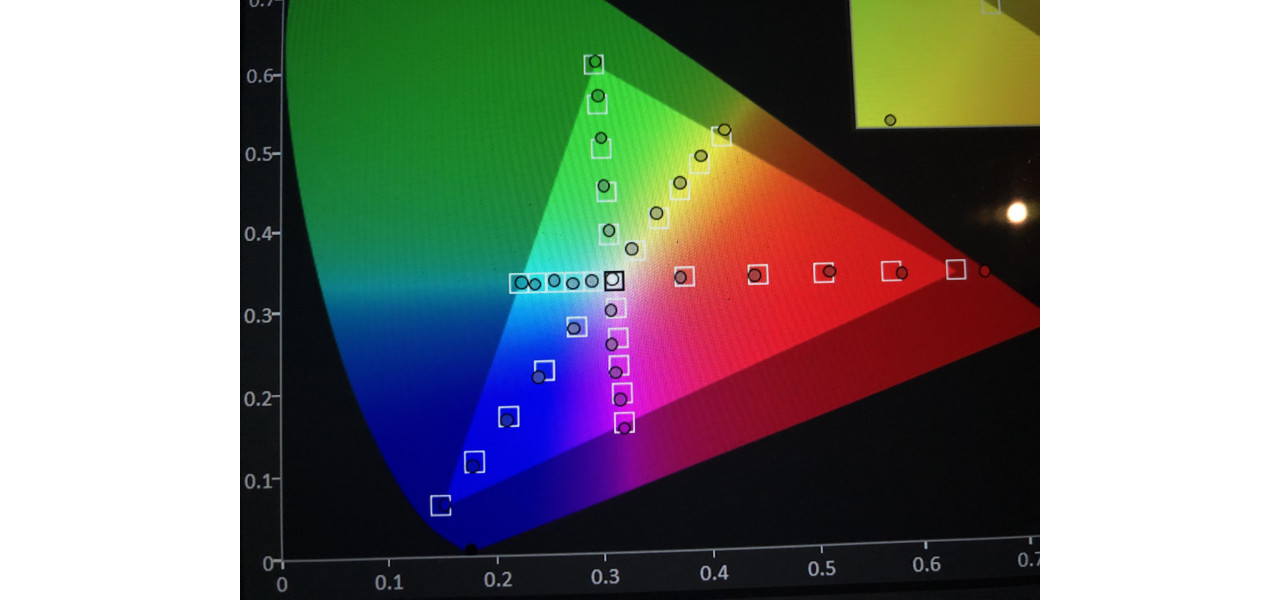
参考资源链接:[印刷术语大全:中英文对照与专业解析](https://wenku.csdn.net/doc/1y36sp606t?spm=1055.2635.3001.10343)
# 1. 印刷色彩管理的基础
在印刷业和数字媒体中,色彩管理是确保从设计
掌握信号完整性,确保硬件性能
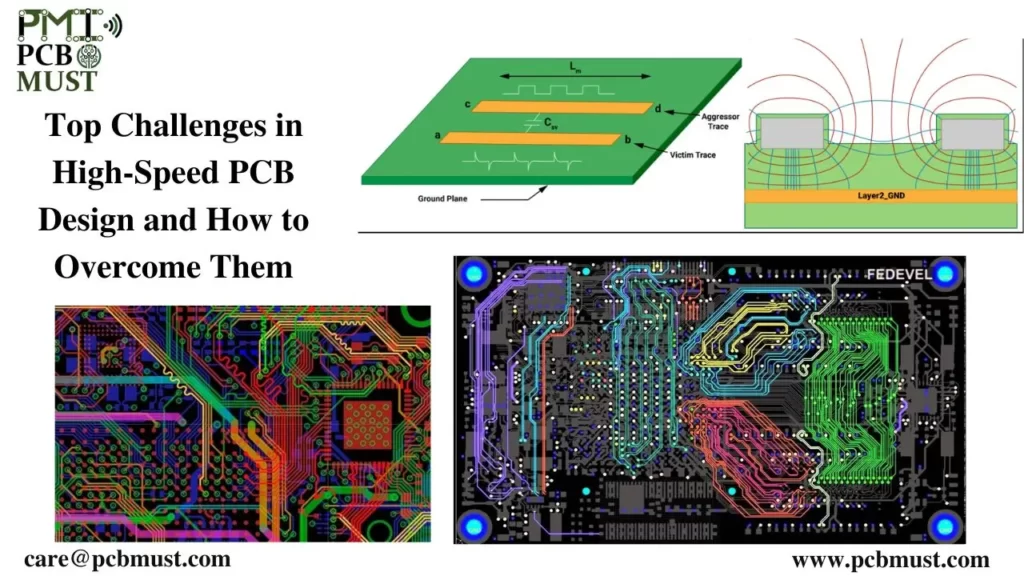
参考资源链接:[PR2000K_AHD转MIPI调试原理图.pdf](https://wenku.csdn.net/doc/645d9a0995996c03ac437fcb?spm=1055.2635.3001.10343)
# 1. 信号完整性基础理论
## 1.1 信号完整性概念解析
信号完整性指的是在高速数字电路中,信号在传输过程中能够保持其原始特
DEFORM-3D_v6.1全流程攻略:掌握模拟到结果分析的每一个环节
参考资源链接:[DEFORM-3D v6.1:交互对象操作详解——模具与毛坯接触关系设置](https://wenku.csdn.net/doc/5d6awvqjfp?spm=1055.2635.3001.10343)
# 1. DEFORM-3D_v6.1基础入门
## 1.1 DEFORM-3D_v6.1软件概述
DEFORM-3D_v6.1是一款广泛应用于金属加工、热处理等领域模拟软件,它通过模拟材料在各种条件下的变形行为,帮助工程师和研究人员进行产品设计优化和生产过程的决策。该软件具有强大的仿真能力,同时也能帮助用户预测可能出现的问题并加以解决。
## 1.2 DEFORM-3D
六西格玛流程改进:立即掌握优化秘籍,使用思维导图实现飞跃
参考资源链接:[六西格玛管理精华概览:从起源到战略应用](https://wenku.csdn.net/doc/646194bb5928463033b19ffc?spm=1055.2635.3001.10343)
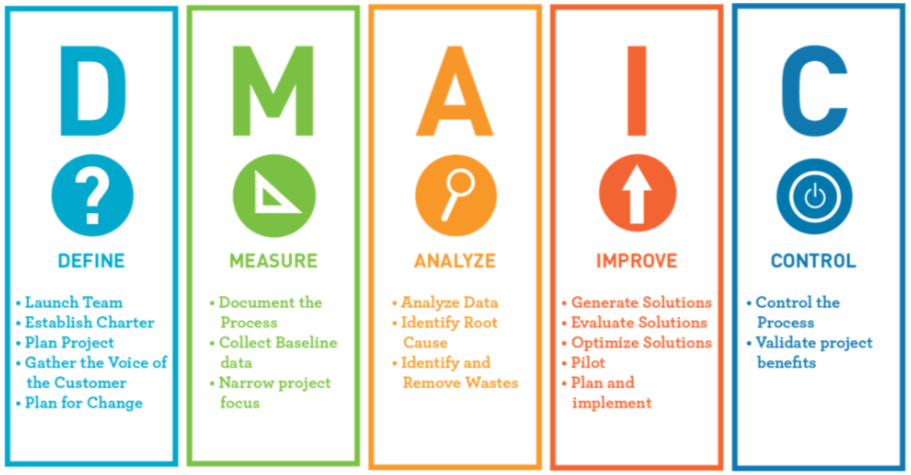
# 1. 六西格玛流程改进概述
## 1.1 六西格玛的起源与定义
六西格玛是一种旨在通过减少过程变异来提高产品和服务质量的管理哲学和一套工具集。它起源于20世纪80年代的摩托罗拉,随着通用
【破解代码质量之谜】:掌握SpyGlass LintRules,提升硬件设计到新高度

参考资源链接:[SpyGlass Lint规则参考指南:P-2019.06-SP1](https://wenku.csdn.net/doc/5
Python错误处理艺术:优雅解决代码中的异常
参考资源链接:[头歌Python实践:顺序结构与复数运算解析](https://wenku.csdn.net/doc/ov1zuj84kh?spm=1055.2635.3001.10343)
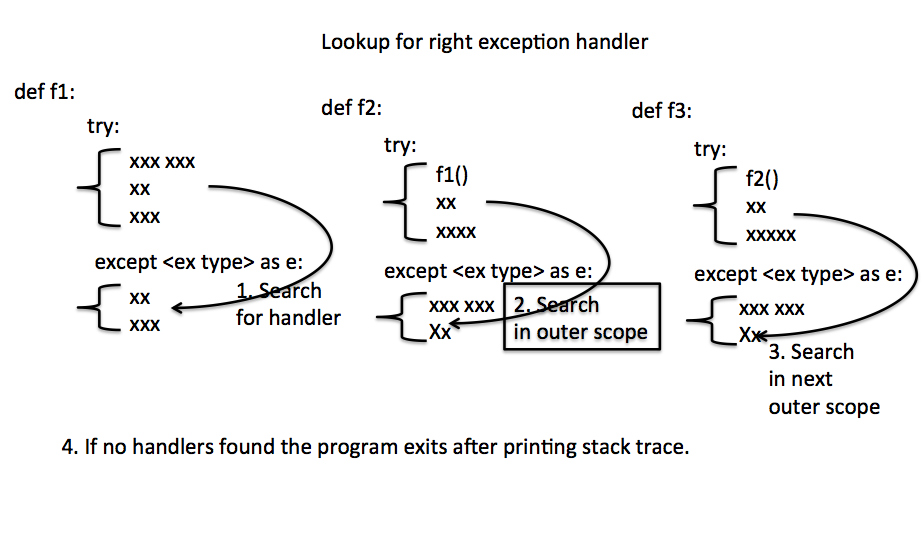
# 1. Python错误处理基础
Python作为一种高级编程语言,其错误处理机制是保证程序健壮性的重要组成部分。当程序运行时,可能会遇到各种预期之外的情况,如输入错误、资源不可用或程序逻辑错误等。这些情况往往会导致程序出现异常,并可能以错误
揭秘进化算法:CEC05 benchmark的十大挑战与突破

参考资源链接:[CEC2005真实参数优化测试函数与评估标准](https://wenku.csdn.net/doc/ewbym81paf?spm=1055.2635.3001.10343)
# 1. 进化算法基础与CEC05挑战概述
## 1.1 进化算法的起源与原理
进化算法是一种模拟生物进化过程的优化算法,它起源于自
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )