RRT算法与线性模型预测控制在复杂环境路径规划中的应用
"这篇论文提出了一种针对未知和复杂环境中的自主旋翼无人机(RUAV)的有效路径规划和控制算法。该算法结合了Rapidly-exploring Random Tree (RRT)变体进行碰撞自由路径生成,以及线性模型预测控制(MPC)用于路径跟踪。通过非线性动力学方程将导航误差映射到线性MPC结构的状态中,以实现对路径的精确控制。提出的路径规划算法考虑了规划阶段的运行时间,并在需要重规划时生成连续曲率路径。模拟结果显示,使用该方法的RUAV能够成功实现自主导航,即使在缺乏环境先验信息的情况下也是如此。"
本文的核心知识点如下:
1. **RRT算法**:RRT算法是一种随机采样算法,用于在未知环境中生成机器人或无人车辆的避障路径。它通过随机生成树节点并逐步扩展树结构来探索环境空间,找到从起点到目标点的可行路径。在本论文中,RRT的变体被用来生成RUAV的碰撞自由路径。
2. **路径平滑**:RRT算法生成的路径通常是离散且不连续的,因此需要平滑处理以提高路径的质量。论文中可能涉及了某种路径平滑技术,使得最终路径更符合实际运动约束,减少转弯半径,提高路径执行的效率和安全性。
3. **线性模型预测控制(MPC)**:MPC是一种先进的控制策略,它基于预测模型预测未来一段时间内系统的状态,通过优化目标函数来确定当前的控制输入。在RUAV的路径跟踪中,MPC可以预见性地调整飞行轨迹,以最小化与目标路径的偏差,确保准确、稳定地跟踪RRT生成的路径。
4. **非线性动力学**:无人机的运动通常由复杂的非线性动力学方程描述,这些方程考虑了空气动力学、旋转力学等因素。论文中提到将导航误差映射到线性MPC的状态,这表明他们可能通过线性化非线性动力学模型,使其适应于MPC框架,以便更有效地进行控制。
5. **实时规划**:提出的算法考虑了规划阶段的运行时间,这意味着它能快速响应环境变化,当环境或目标改变时,能够迅速重新规划路径,保证RUAV在动态环境中的安全和自主导航能力。
6. **自主导航**:RUAV的自主导航是指无人机能够在没有人工干预的情况下,根据预设的目标和传感器信息,自行规划和执行飞行任务。本文的算法展示了即使在缺乏环境信息的情况下,RUAV也能完成自主导航,这依赖于RRT的环境探索能力和MPC的自适应控制能力。
这篇研究结合了RRT路径规划和MPC控制策略,为RUAV在复杂环境中的自主导航提供了一种高效解决方案,同时考虑了实时性和路径质量,确保了在未知环境中的安全飞行。
J Intell Robot Syst (2010) 57:101–122 105
The second curve consists of the following four control points:
E
0
= P
2
+d ·u
2
, E
1
= E
0
− g
e
·u
2
,
E
2
= E
1
−h
e
·u
2
, E
3
= E
2
−k
e
·u
d
(4)
where
h
b
= h
e
= c
3
·d,
g
b
= g
e
= c
1
c
3
·d,
k
b
= k
e
=
6c
3
cos β
c
1
+4
·d (5)
Here u
1
is a unit vector between P
2
and P
1
, u
2
is that of P
3
and P
2
and u
d
is a unit
vector between B
2
and E
2
,andd is a length between B
0
and P
2
,andβ =
γ
2
,and
c
1
=
2
5
(
√
6 −1),andc
2
= 7.2364,andc
3
=
c
1
+4
c
2
+6
.
The only design variable to generate a continuous curvature path is d as can be
seen in Eqs. 3–5.Ifd is selected as Eq. 6 [19], then the path generates a G
2
path
which satisfies the maximum curvature constraint.
d =
(c
1
+4)
2
54c
3
·
sin β
κ
max
·cos
2
β
(6)
where κ
max
is a maximum curvature value.
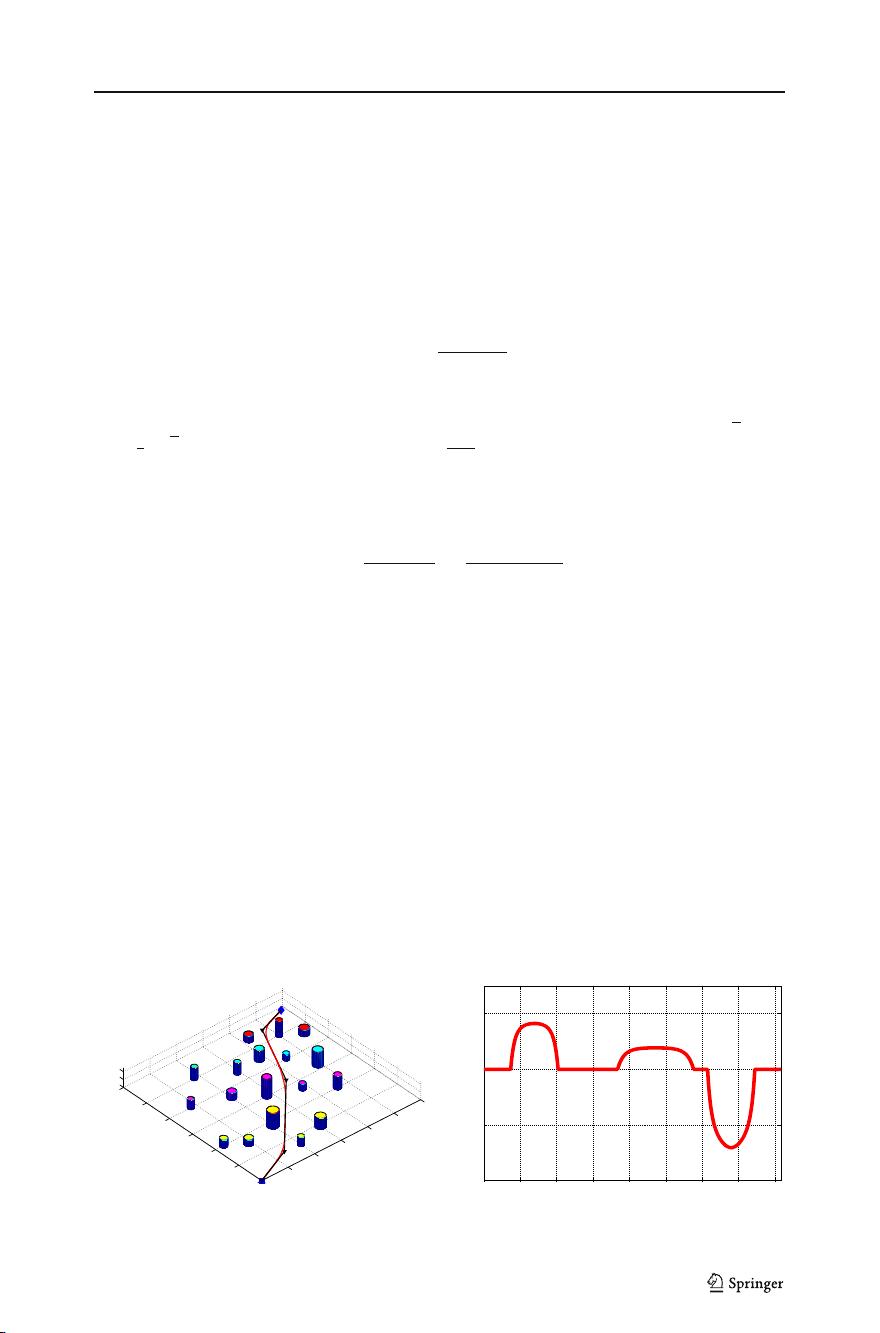
Figure 3 shows smoothed path result (Left) and the curvature of the path (Right).
3 Path Following Control
3.1 Helicopter Model
In this research a six DOF rigid body model suggested by Mettler et al. [20] was used.
It expresses a small-size unmanned helicopter with system equations of first order.
This model captures the nonlinear helicopter dynamics with very high accuracy and
has been applied successfully in real applications [21].
The system equation is given as
˙
x(t) = f (x(t), u(t)) (7)
0
50
100
150
200
250
300
0
50
100
150
200
250
300
0
10
20
East(m)North(m)
Altitude(m)
0 50 100 150 200 250 300 350 400
−0.02
−0.01
0
0.01
Fig. 3 (Left) Continuous curvature path smoothing. (Right) Curvature of the path
剩余21页未读,继续阅读
2021-01-29 上传
2017-02-07 上传
2024-10-09 上传
2023-10-25 上传
2023-05-13 上传
2023-05-27 上传
2023-08-27 上传
2023-05-03 上传

最后一枪
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
