3D视频系统中基于非对称自恢复的立体图像水印方法
需积分: 9 164 浏览量
更新于2024-07-09
收藏 2.44MB PDF 举报
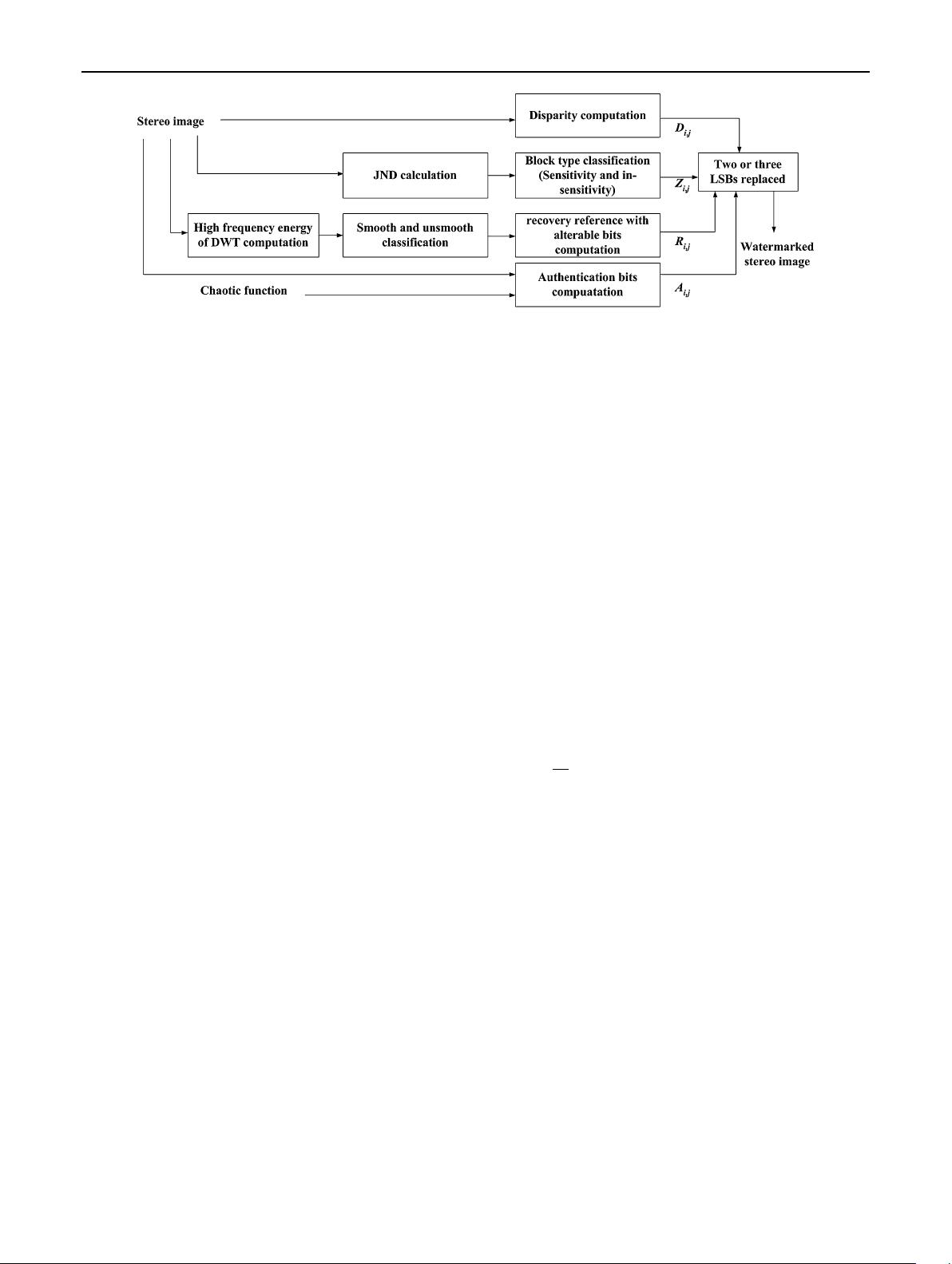
本文主要探讨的是"面向非对称自我恢复的三维视频系统立体图像水印方法",针对三维视频系统的立体图像完整性验证提出了创新性的解决方案。在设计上,作者关注了立体图像左右视图之间的关联性,强调了不对称的自我恢复机制在水印容量分配中的应用。这种机制不对称地在每个视图中嵌入恢复参考,使得在检测到篡改区域时,通过利用视差,能有效地恢复被篡改的左视图和右视图,从而保持立体图像的质量。
水印的安全性是关键,因此采用了混沌函数生成认证位,以增强对篡改的检测能力。作者采用离散小波变换(DWT)分析图像,区分高频能量块为平滑类型和复杂类型,进一步确定恢复参考的可变位。这种策略旨在提高水印的透明性,同时保持一定的鲁棒性,考虑到人类视觉的感知特性,将图像块分为敏感和不敏感两类,仅在敏感区域嵌入水印。
实验部分着重评估了该方法的性能,通过设置两个或三个最低有效位来控制嵌入的像素数量。结果显示,提出的非对称自我恢复立体图像水印方法在对抗大规模篡改时表现出色,能够高效地重构受损的立体图像,且在透明性和水印能力之间实现了良好的平衡,相比其他现有的立体图像水印技术,其性能有显著提升。
这篇研究论文针对三维视频系统的立体图像保护提出了创新的水印方法,结合了不对称恢复、视差处理、混沌认证以及视觉感知等因素,旨在提供一种更为有效的立体图像完整性保护手段,适用于如3DTV和FTV等多媒体应用。这为未来三维视频的安全传输和存储提供了理论支持和技术指导。
643
Asymmetric self-recovery oriented stereo image watermarking method for three dimensional…
1 3
of the left and right views are denoted as
B
L
i,j
and
B
R
i,j
,
respectively, where 1 ≤ i ≤ N
1
/4 and 1 ≤ j ≤ N
2
/4.
Step 2 The pixel-wise disparity map is divided into non-
overlapping blocks with the size of 4 × 4, and is trans-
formed to a block-wise disparity map. The block-wise
disparity D
i,j
is computed that if pixel-wise disparities in
the same block are all equal, D
i,j
is d(a, b), otherwise, it
is set to 255.
Step 3 JND value is computed for each block to deter-
mine the block type Z
i,j
, that is, sensitive or insensitive.
Compared with the sensitive block, large modifica-
tion of the insensitive block can not be discovered by
human vision. Thus, two and three LSBs of sensitive
and insensitive blocks are supplied for embedding
watermark, respectively. It is concretely described in
Sect. 2.1.1.
Step 4 Since DWT coefficients with high frequency ener-
gies represent detail information of blocks, they are used
to classify blocks into smooth and unsmooth. Recovery
reference R
i,j
are computed based on block’s smooth-
ness. It will be depicted specifically in Sect. 2.1.2.
Step 5 Authentication bits A
i,j
are computed and
described in Sect. 2.1.3.
Step 6 Watermarking capacity is allocated for asymmet-
ric embedding, and D
i,j
, Z
i,j
, R
i,j
and A
i,j
are embedded
into the left and right views of the original stereo image
to obtain its watermarked stereo image. In detail, they
are depicted in Sects. 2.1.4 and 2.1.5, respectively.
2.1.1 Block type classification
To obtain a trade-off between watermarking’s transparency
and capacity, blocks of the left and right views are clas-
sified into sensitive or insensitive ones according to JND
value which is related to background luminance masking
and texture masking. Background luminance masking is
taken into account that luminance contrast is more sensitive
than absolute luminance, and texture masking is built
on that textured regions can hide more information than
smooth or edge regions [21]. Let
JND
p
a,b
denote the JND
value of the pixel p at the position (a, b) and then it is com-
puted by using Eq. (1) [21].
where U
l
and U
t
are visibility thresholds of background
luminance masking and texture masking, respectively, and
they are specifically defined in [21]. v
l
,
t
is the parameter
accounting for the overlapping effect in masking between
0 and 1. Since JND value of each pixel is computed for
detecting tamper, in the process of computing texture
masking, the threshold for image edge detection with Sobel
operator is a secret key
.
Let
JND
B
i,j
denote the JND value of
each block, and it is computed as follows
Then, let Z
i,j
denote block type, and it is calculated by
where 1 and 0 indicates that the block is sensitive and
insensitive, respectively. When three LSBs of a pixel are
substituted, the largest difference between the original pixel
and the modified pixel is 7. Thus, T
s
is set to 7 for control-
ling LSB substitution without exceeding JND values. As
illustrated in Fig. 1, the pixels of the sensitive block only
offer two LSBs for embedding watermark, while the pixels
of the insensitive block offer three LSBs [23].
2.1.2 Recovery reference generation
Alterable bits are adopted to represent recovery reference
R
i,j
so as to recover the corresponding block when the
(1)
JND
p
a,b
= U
l
+ U
t
− v
l,t
× min(U
l
, U
t
)
(2)
JND
B
i,j
=
1
16
i×4
�
a=(i−1)×4+1
j×4
�
b=(j−1)×4+1
JND
p
a,b
(3)
Z
i,j
=
1, JND
B
i,j
< T
s
0, otherwise
Fig. 1 Block diagram of watermark embedding
剩余14页未读,继续阅读
114 浏览量
点击了解资源详情
点击了解资源详情
101 浏览量
2025-02-01 上传
2025-02-27 上传
129 浏览量
146 浏览量
101 浏览量

weixin_38689191
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小学水墨风学校网站模板设计
- 深入理解线程池的实现原理与应用
- MSP430编程代码集锦:实用例程源码分享
- 绿色大图幻灯商务响应式企业网站开发源码包
- 深入理解CSS与Web标准的专业解决方案
- Qt/C++集成Google拼音输入法演示Demo
- Apache Hive 0.13.1 版本安装包详解
- 百度地图范围标注技术及应用
- 打造个性化的Windows 8锁屏体验
- Atlantis移动应用开发深度解析
- ASP.NET实验教程:源代码详细解析与实践
- 2012年工业观察杂志完整版
- 全国综合缴费营业厅系统11.5:一站式缴费与运营管理解决方案
- JAVA原生实现HTTP请求的简易指南
- 便携PDF浏览器:随时随地快速查看文档
- VTF格式图片编辑工具:深入起源引擎贴图修改
