基于CAN总线的雷达网络测控系统设计与实现
44 浏览量
更新于2024-08-30
收藏 160KB PDF 举报
"嵌入式系统/ARM技术中的基于CAN总线的雷达网络测控系统设计 嵌入式系统/ARM技术"
本文探讨的是如何利用嵌入式系统和ARM技术设计一个基于CAN(Controller Area Network)总线的雷达网络测控系统。随着现代测控技术的进步,多雷达系统的协同跟踪能力变得至关重要。由于大多数现有雷达系统不具备这种能力,研究人员针对某一特定型号的雷达,开发了一种基于CAN总线的网络测控系统,旨在提升雷达的协同探测和测控效能。
该系统的核心是一个主从式网络测控架构。在这一结构中,主节点负责协调和管理网络,而从节点则接收并执行主节点的命令。与传统的数据网络相比,控制网络的数据帧更短,数据交换频率更高,并且有严格的实时性要求。考虑到雷达工作时面临的复杂电磁环境和远程通信需求,CAN总线成为理想的通信协议选择。CAN总线具有高速传输能力、强抗干扰性,以及出色的错误检测机制,即使在长达10公里的距离上,仍能保持较高的数据速率。
系统设计中,每个雷达节点通过CAN接口连接到总线上,形成一个分布式网络。这种拓扑结构允许各个雷达节点共享目标信息、状态信息等关键数据,从而实现协同工作。通过CAN总线,雷达节点可以实时接收和发送数据,提高整个系统的响应速度和协同效率。
在具体实现上,嵌入式系统和ARM处理器扮演了关键角色。嵌入式系统以其小巧、高效和实时性优点,非常适合在雷达这样的实时性强、计算量大的环境中应用。ARM处理器作为嵌入式领域的主流选择,提供了强大的处理能力,可以处理大量数据处理和通信任务,确保雷达网络的稳定运行。
系统原理主要包括数据采集、处理和传输。每个雷达节点都有数据采集模块,用于捕获和处理来自雷达传感器的信息,然后通过CAN控制器将处理后的数据编码成CAN数据帧,通过总线发送到其他节点。同样,节点也能接收并解码来自其他节点的数据,从而实现信息的双向交流。
这个基于CAN总线的雷达网络测控系统通过嵌入式系统和ARM技术实现了雷达间的高效信息交换,显著提升了多雷达系统的整体性能。这种设计思路为未来雷达系统和其他类似测控系统的升级和现代化提供了有价值的参考。
嵌入式系统嵌入式系统/ARM技术中的基于技术中的基于CAN总线的雷达网络测控系统总线的雷达网络测控系统
设计设计
1 引言 随着测控技术的快速发展,现代雷达系统对于多雷达高精度协同测控跟踪能力的需求越来越高。然
而,现役的大多数雷达并不具有这样的功能。基于某型号雷达,我们开发了基于CAN总线的雷达网络测控系
统。经过对雷达加装该系统,我们构建了雷达局域测控网络,实现了基于CAN总线网络的雷达间目标,状态等
相关信息的共享。利用这些信息,网络中各雷达可以进行相互配合工作,极大地提高了雷达的探测与协同能
力。 2 雷达网络测控测控系统的基本结构与原理 2.1 CAN总线测控网络的结构与特点 从本质上
看,我们设计的雷达网络测控系统,属于主从式网络测试控制系统。与数据网络相比, 控制网络具有数据帧
1 引言
随着测控技术的快速发展,现代雷达系统对于多雷达高精度协同测控跟踪能力的需求越来越高。然而,现役的大多数雷达
并不具有这样的功能。基于某型号雷达,我们开发了基于CAN总线的雷达网络测控系统。经过对雷达加装该系统,我们构建
了雷达局域测控网络,实现了基于CAN总线网络的雷达间目标,状态等相关信息的共享。利用这些信息,网络中各雷达可以
进行相互配合工作,极大地提高了雷达的探测与协同能力。
2 雷达网络测控测控系统的基本结构与原理
2.1 CAN总线测控网络的结构与特点
从本质上看,我们设计的雷达网络测控系统,属于主从式网络测试控制系统。与数据网络相比, 控制网络具有数据帧短、
数据交换频繁、有实时约束等特点。同时雷达本身工作时电磁环境复杂,相对距离较远,这都对采用的总线形式提出了较高的
要求。
近20 年来, 控制网络获得迅速发展,特别是作为其主流的现场总线技术已形成了一系列国际标准,CAN总线是其中一种
比较有影响的现场总线标准。CAN总线是一种多主方式的串行通讯总线,有高的位速率,高抗电磁干扰性,而且能够检测出
产生的多种错误。当信号传输距离达到10Km时,CAN仍可提供高达50Kbit/s的数据传输速率。 同时CAN总线具有很高的实时
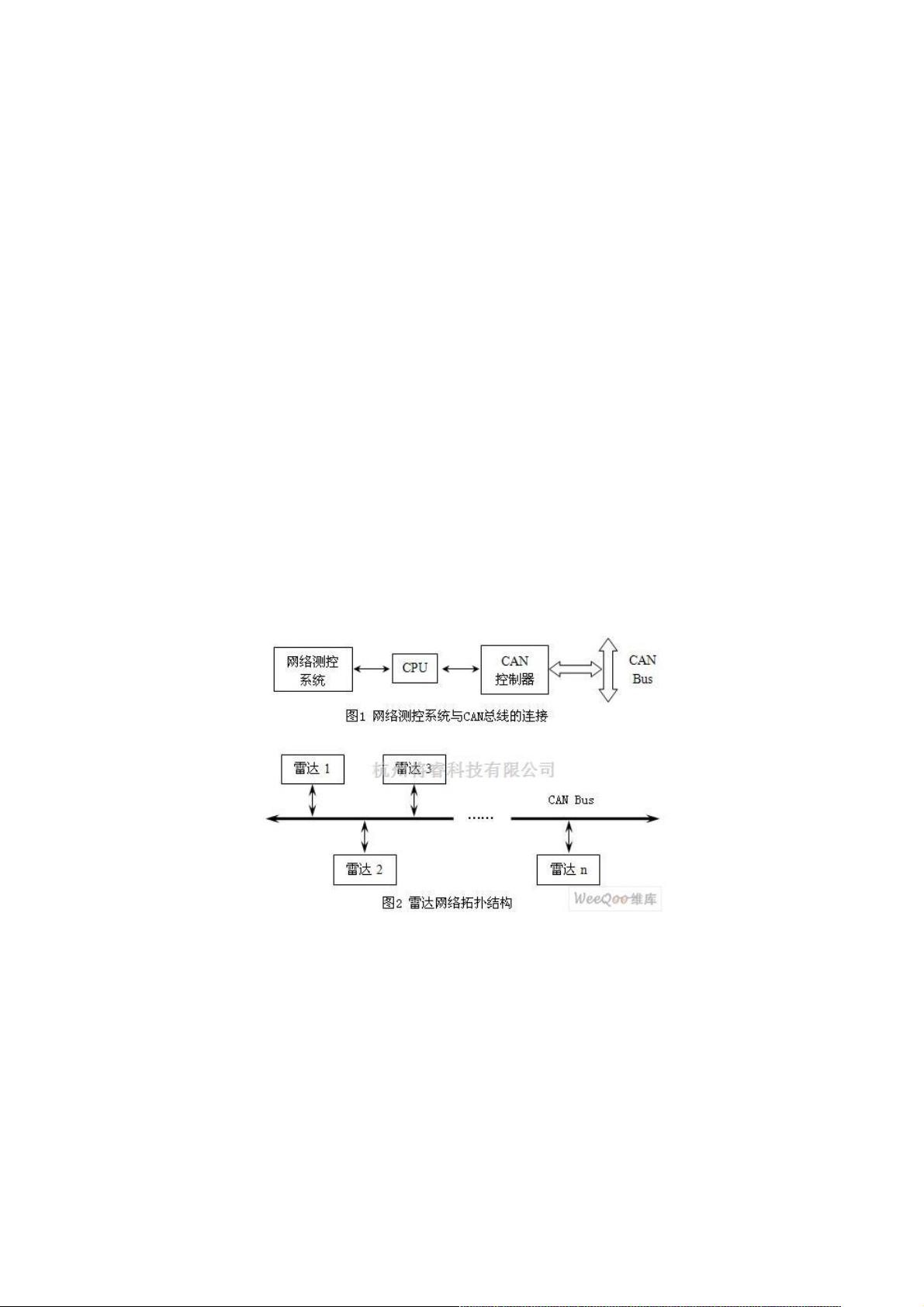
性能,在工业控制、安全防护等领域中得到了广泛应用。因此我们选择CAN总线构建网络。图1与图2分别显示了雷达网络测
控系统与CAN总线的连接关系及各雷达间互连的拓扑结构。
2.2 系统原理
同其他网络测控系统一样,雷达网络测控系统的主要工作基础是对于相关数据的采集与共享。在这个网络中,依据实际的
工作环境与实际情况的需要,每个雷达既可以作为一个独立单元工作,也可以作为网络的节点工作。当雷达成为网络的一个节
点工作时,其可以依据网络*享的数据,与网内的其他雷达共同协同跟踪工作。
在一般情况下,网络中的雷达作为独立的节点进行工作,此时网络中的每个雷达是对等的。当出现特殊目标或其他需要多
雷达对同一目标进行协同跟踪的情况下,雷达的操作手可以通过雷达网络测控系统向网络发出进入网络工作状态的指令。网内
其他雷达收到指令后,操作手可以依据该雷达的具体情况选择继续独立工作或进入网络协同工作。进入网络的雷达之间为主从
关系,发出指令与数据的雷达为主雷达,接收共享数据的雷达为从雷达。处于网络状态工作的雷达,也可以随时退出网络工
作。
3 系统硬件结构
由以上对系统原理的分析可以看出,该系统的设计关键技术主要包括:雷达及目标信息的获取与共享,目标数据的计算、
校正及基于校正数据的目标跟踪。系统的硬件设计亦基于此进行。
下载后可阅读完整内容,剩余3页未读,立即下载
2020-11-16 上传
138 浏览量
504 浏览量
558 浏览量
747 浏览量
点击了解资源详情
2057 浏览量
2034 浏览量
1040 浏览量

weixin_38654382
- 粉丝: 1
- 资源: 932
 我的内容管理
展开
我的内容管理
展开







