MVDepthNet深度学习框架中的Cost Volume详解与应用
需积分: 0 164 浏览量
更新于2024-08-05
收藏 1MB PDF 举报
在DTAM(Depth from Template and Motion)中,cost_volume是一个核心概念,主要用于多视图深度估计网络MVDepthNet的架构中。它涉及到计算机视觉中的3D重建和深度估计技术。首先,我们来探讨一些基础符号和变换:
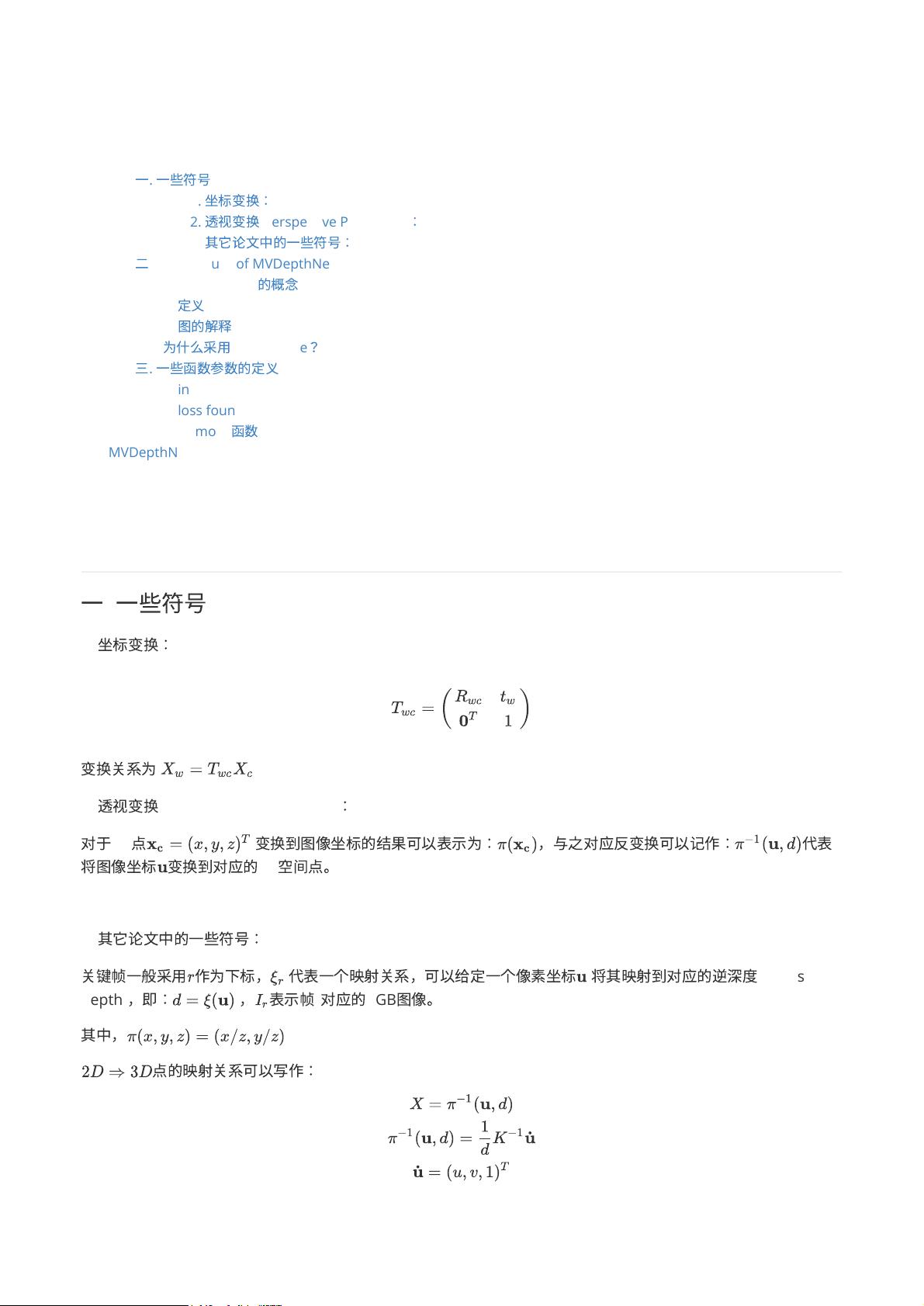
1. **坐标变换**:在三维空间中,坐标变换是将一个物体从一个坐标系转换到另一个坐标系的过程。例如,透视变换(Perspective Projection)是将3D点转换为二维图像平面上的一种投影方式,其公式通常涉及x, y, z坐标和相机参数。
2. **透视变换的数学表达**:一个3D点(x, y, z)经过透视变换后在图像上的投影可以通过以下公式表示:`(u, v) = (x/z, y/z)`, 其中(u, v)是像素坐标,z是物体到相机的距离。逆变换则用来从图像像素坐标恢复3D位置。
3. **论文中的其他符号**:在MVDepthNet的上下文中,关键帧常常用下标`k`标识,表示帧之间的映射关系。逆深度(inverse depth)通常用`d_k`表示,用于量化像素到3D空间的距离。点的映射关系可以表示为`p_r`到`p_r^k`,其中`r`代表当前帧,`k`是相邻帧。
**Cost Volume**:
在MVDepthNet中,cost_volume是深度估计的核心组件。它是一个三维数组,其中的每个元素表示帧`r`中的每个像素与一组邻接帧(通常是前后几帧)中所有可能的深度值的匹配成本。这些成本反映了当前像素与不同深度下的前景对象的匹配程度。通过比较这些成本,网络可以学习到更准确的深度估计。
**为什么要使用Cost Volume**:
采用cost_volume的主要原因是它可以有效地利用多帧间的运动信息,提高深度估计的准确性。通过计算每个像素点在不同帧中的相似度,网络能够捕捉到连续帧之间的运动变化,从而减少因单帧不确定性导致的深度估计偏差。尤其是对于动态场景和低纹理区域,cost_volume有助于提高深度估计的稳定性和精度。
**网络结构中的Skip Connections**:
在MVDepthNet的编码器(encoder)和解码器(decoder)之间,skip connections被设计用来结合低层次的细节信息(如边缘和纹理)和高层次的全局信息。编码器负责提取全局特征并聚合高精度的像素级costs,而解码器则将这些高层信息上采样到更高分辨率,再与低层的细节信息结合,通过skip connections进行融合,最终生成更精确的深度图。
**定义和应用**:
Cost_volume的具体实现包括选择合适的base_lines(参考线或基础帧),通常选择重叠较多的帧,因为它们提供了更丰富的运动信息。网络的目标是基于这些帧的cost_volume估计每个像素的逆深度,从而构建一个完整的深度图。这种技术在处理实时或移动设备上的场景估计时尤其有价值,因为它可以在有限的计算资源下提供相对准确的3D重建。
总结起来,DTAM中的cost_volume是多视图深度估计的关键工具,它通过结合多个帧的信息来估计每个像素的深度,借助于网络结构中的skip connections,有效整合了细节和全局信息,提高了深度估计的性能。
MVDepthNet Papaer
⼀
.
⼀
些
符
号
1.
坐
标
变
换
:
2.
透
视
变
换
(Perspective Projection)
:
3.
其
它
论
⽂
中
的
⼀
些
符
号
:
⼆
. architecture of MVDepthNet
1. Cost Volume
的
概
念
2.
定
义
cost volume
3.
图
的
解
释
为
什
么
采
⽤
cost volume
?
三
.
⼀
些
函
数
参
数
的
定
义
1. inverse depth
2. loss founction
3. sigmoid
函
数
MVDepthNet code
depthNet_model.py
MVDepthNet Papaer
⼀
.
⼀
些
符
号
1.
坐
标
变
换
:
变
换
关
系
为
2.
透
视
变
换
(Perspective Projection)
:
对
于
3D
点
变
换
到
图
像
坐
标
的
结
果
可
以
表
⽰
为
: ,
与之
对
应
反变
换
可
以
记
作
:
代
表
将
图
像
坐
标
变
换
到
对
应
的
3D
空
间
点
。
3.
其
它
论
⽂
中
的
⼀
些
符
号
:
关
键
帧
⼀
般
采
⽤
作
为下
标
,
代
表
⼀个
映
射
关
系
,
可
以
给
定
⼀个
像
素
坐
标
将
其
映
射
到
对
应
的
逆
深
度
(inverse
depth)
,
即
:
,
表
⽰
帧
r
对
应
的
RGB
图
像
。
其
中
,
点
的
映
射
关
系
可
以
写
作
:
下载后可阅读完整内容,剩余4页未读,立即下载
2021-05-13 上传
2021-08-13 上传
2023-05-30 上传
2023-05-19 上传
2023-03-01 上传
2024-09-20 上传
2024-09-20 上传
2024-09-20 上传

明儿去打球
- 粉丝: 17
- 资源: 327
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多传感器数据融合手册:国外原版技术指南
- MyEclipse快捷键大全,提升编程效率
- 从零开始的编程学习:Linux汇编语言入门
- EJB3.0实例教程:从入门到精通
- 深入理解jQuery源码:解析与分析
- MMC-1电机控制ASSP芯片用户手册
- HS1101相对湿度传感器技术规格与应用
- Shell基础入门:权限管理与常用命令详解
- 2003年全国大学生电子设计竞赛:电压控制LC振荡器与宽带放大器
- Android手机用户代理(User Agent)详解与示例
- Java代码规范:提升软件质量和团队协作的关键
- 浙江电信移动业务接入与ISAG接口实战指南
- 电子密码锁设计:安全便捷的新型锁具
- NavTech SDAL格式规范1.7版:车辆导航数据标准
- Surfer8中文入门手册:绘制等高线与克服语言障碍
- 排序算法全解析:冒泡、选择、插入、Shell、快速排序
