四元数解算姿态完全指南
需积分: 35 13 浏览量
更新于2024-07-19
2
收藏 2.36MB DOCX 举报
"四元数解算姿态完全解析及资料汇总"
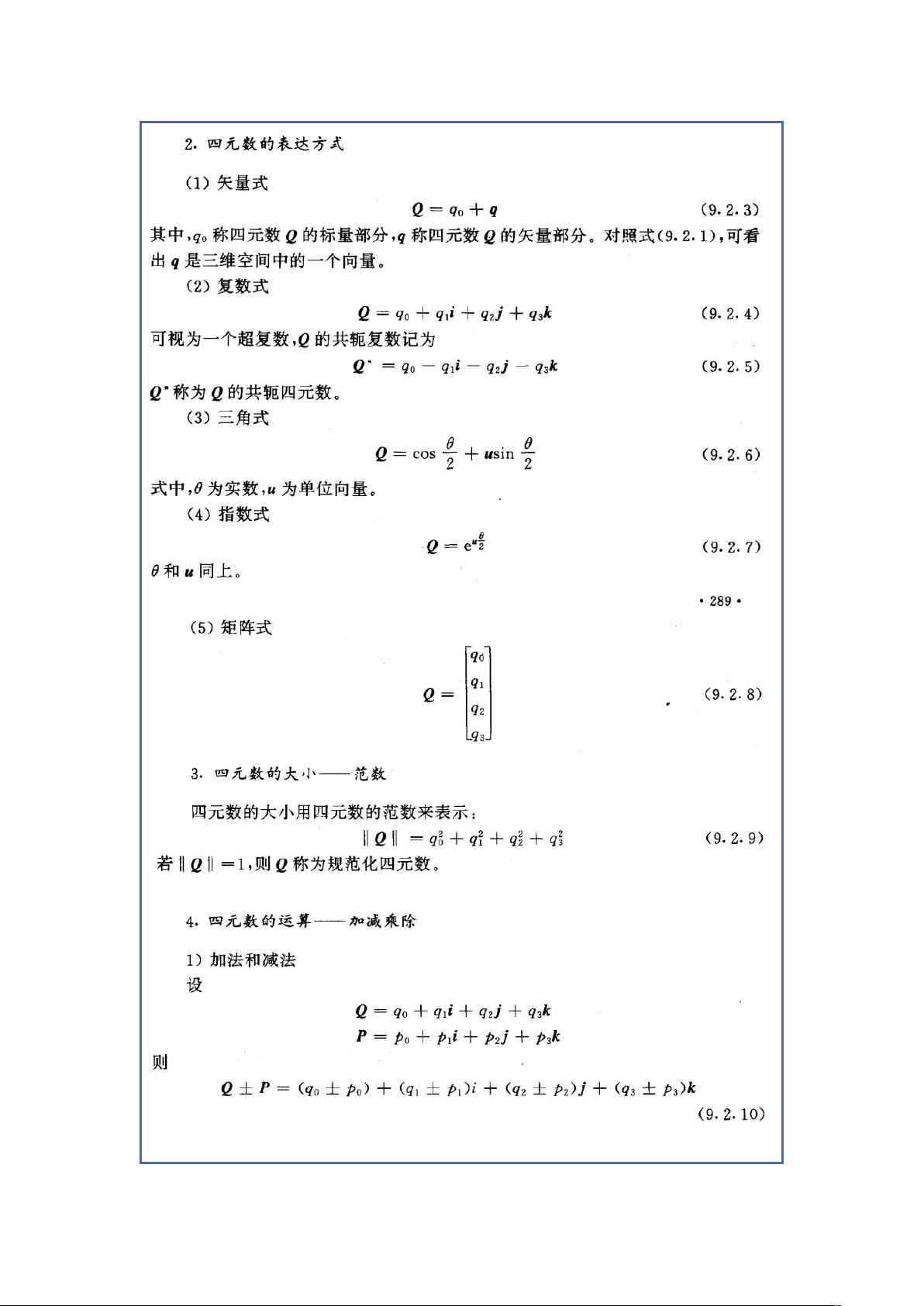
四元数是一种数学概念,广泛应用于三维空间的旋转表示,特别是在计算机图形学和飞行器导航等领域。它是由四个实数组成的复数扩展,通常表示为(q0, q1, q2, q3)。在姿态解算中,四元数用于描述刚体(如无人机或航天器)相对于某个参考坐标系的旋转状态。四元数具有以下特点:
1. **四元数的定义**:四元数由一个实部(q0)和三个虚部(q1, q2, q3)组成,形式为 q = q0 + qi,其中 i^2 = -1。在姿态表示中,q0通常代表旋转的幅度,而(q1, q2, q3)则构成旋转轴的方向。
2. **四元数与姿态阵的关系**:四元数与旋转矩阵(也称作姿态矩阵)之间有直接联系。一个单位四元数可以对应一个3x3的正交旋转矩阵,这个矩阵可以将一个坐标系旋转到另一个坐标系。两者之间的转换可以通过特定的公式实现。
3. **四元数微分**:在动态系统中,四元数会随时间变化,这涉及到四元数的微分方程。通过角速度(陀螺仪测量值)可以求解四元数的变化率。这个过程通常使用四元数的导数公式,结合龙格-库塔方法进行数值积分,从而得到连续的四元数轨迹。
4. **惯性单元测量值融合**:在实际应用中,惯性测量单元(IMU)包括加速度计和陀螺仪,它们分别提供物体的线性加速度和角速度。通过滤波算法(如卡尔曼滤波或互补滤波)将这些测量值融合,可以计算出稳定的四元数表示,进一步可以转换为欧拉角,欧拉角是更直观的三维旋转描述。
5. **解算流程**:姿态解算通常按照以下步骤进行:
- 从IMU获取加速度和角速度数据。
- 将角速度数据转化为四元数的微分。
- 使用数值积分方法(如龙格-库塔)更新四元数。
- 如果需要,将四元数转换为欧拉角。
- 根据需要进行误差校正和滤波处理。
6. **代码实现**:在实际编程中,四元数的运算通常涉及特定的库函数,例如OpenGL的GLM库或航空航天领域的C++库如Eigen。代码通常包括四元数的初始化、乘法、微分和欧拉角转换等操作。
7. **学习资源**:对于初学者,推荐阅读秦永元的《惯性导航》等专业书籍,同时结合实际代码进行学习,以便更好地理解和应用四元数解算姿态的原理。
理解四元数及其在姿态解算中的应用需要一定的数学基础,特别是线性代数和复数知识。通过逆向思维,从欧拉角出发反推至传感器数据,可以帮助理解这一过程。在实践中,结合开源代码和理论知识,可以逐步掌握四元数姿态解算的核心技术。
剩余19页未读,继续阅读
131 浏览量
1807 浏览量
点击了解资源详情
962 浏览量
1807 浏览量
295 浏览量
199 浏览量
131 浏览量

qq_34634526
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







