四元数解算姿态:从理论到实践
该资源是一个关于四元数在姿态解算中的应用的详细教程,旨在帮助初学者理解四元数及其在姿态计算中的作用。教程包括四元数的定义、四元数与姿态角的关系,以及如何通过惯性测量单元(IMU)的数据来解算姿态角。
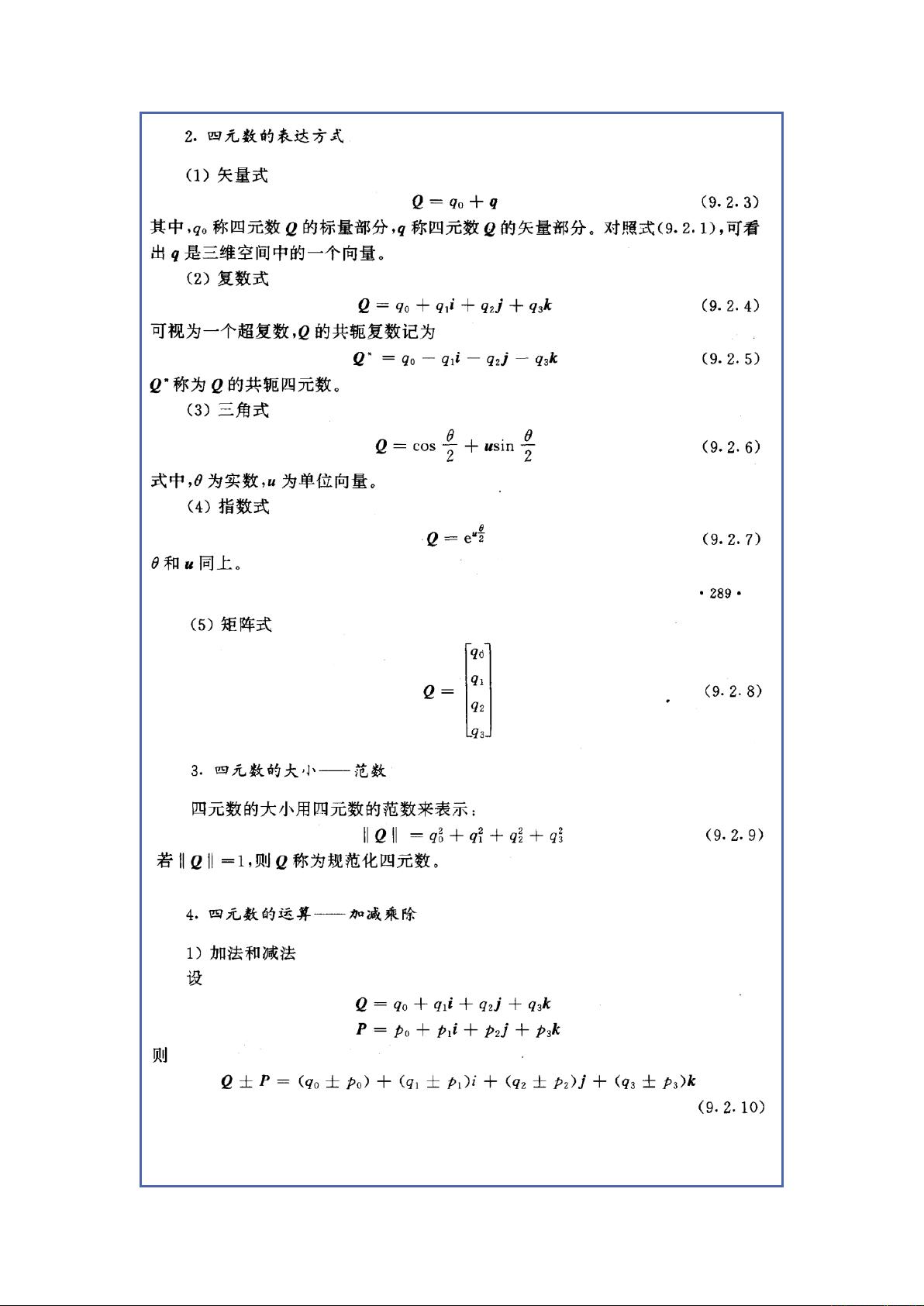
四元数是一种数学概念,扩展了复数的概念,由四个实数组成,通常表示为(q0, q1, q2, q3)。在三维空间中,四元数广泛用于表示旋转,特别是对于飞行器、机器人或任何需要连续旋转的系统的姿态表示。它们的优势在于避免了旋转的万向节死锁问题,这是欧拉角在特定条件下会出现的问题。
四元数与姿态角的关系在于,四元数可以精确地表示物体相对于某个参考坐标系的旋转。姿态角,如俯仰、翻滚和偏航角,可以通过四元数转换得到。四元数的解算过程通常涉及以下步骤:
1. **重力加速度归一化**:首先,从IMU获取的加速度数据需要被归一化,以消除量纲并确定重力方向。
2. **重力分量提取**:通过分析归一化的加速度,可以识别出沿重力方向的分量。
3. **姿态误差计算**:根据当前估计的姿态和重力分量之间的差异,计算姿态误差。
4. **误差积分**:这个误差随着时间积累,通过积分来更新姿态估计。
5. **互补滤波**:为了减小噪声和漂移的影响,通常会使用互补滤波器结合角速度数据来平滑姿态估计。
6. **解四元数微分方程**:根据角速度和之前的时间步长,更新四元数的状态,这通常涉及到四元数微分方程的解。
7. **四元数归一化**:确保四元数始终代表一个有效的旋转,通过归一化保持其模为1。
8. **四元数转欧拉角**:最后,将四元数转换为更直观的欧拉角表示,如俯仰、翻滚和偏航。
在讲解过程中,作者建议读者结合实际代码进行学习,以更好地理解这些理论概念如何在实际应用中实现。代码示例中,关键步骤用红色标注,并与上述步骤对应。
这篇教程提供了一条从基础知识到实际应用的路径,适合想要深入了解四元数姿态解算的初学者。通过学习,读者不仅可以理解四元数的基本概念,还能掌握如何利用四元数处理来自IMU的数据,从而计算出精确的飞行器或设备姿态。
剩余18页未读,继续阅读
929 浏览量
点击了解资源详情
131 浏览量
295 浏览量
164 浏览量
295 浏览量
131 浏览量
103 浏览量
2022-08-08 上传









