川崎机器人AS语言码垛程序详细制作教程
需积分: 34 127 浏览量
更新于2024-07-16
收藏 648KB PDF 举报
AS语言码垛程序制作说明书是一份详细介绍川崎机器人在制造过程中使用的码垛编程技术的详细指南。该文档发布于2017年11月,由川崎机器人(天津)的马洪利编著,版权归属于Kawasaki Heavy Industries, Ltd.。文档旨在帮助用户理解和编写适用于川崎机器人的AS语言码垛程序,这是一种自动化控制系统中的关键组成部分。
首先,学习者需要掌握基本的AS语言,这是制作码垛程序的基础。《常用AS语言》是推荐的学习资料,它概述了AS语言的核心概念、语法和应用场景,以便于读者快速上手。理解了AS语言后,制作码垛程序的流程变得更加清晰,包括以下几个主要部分:
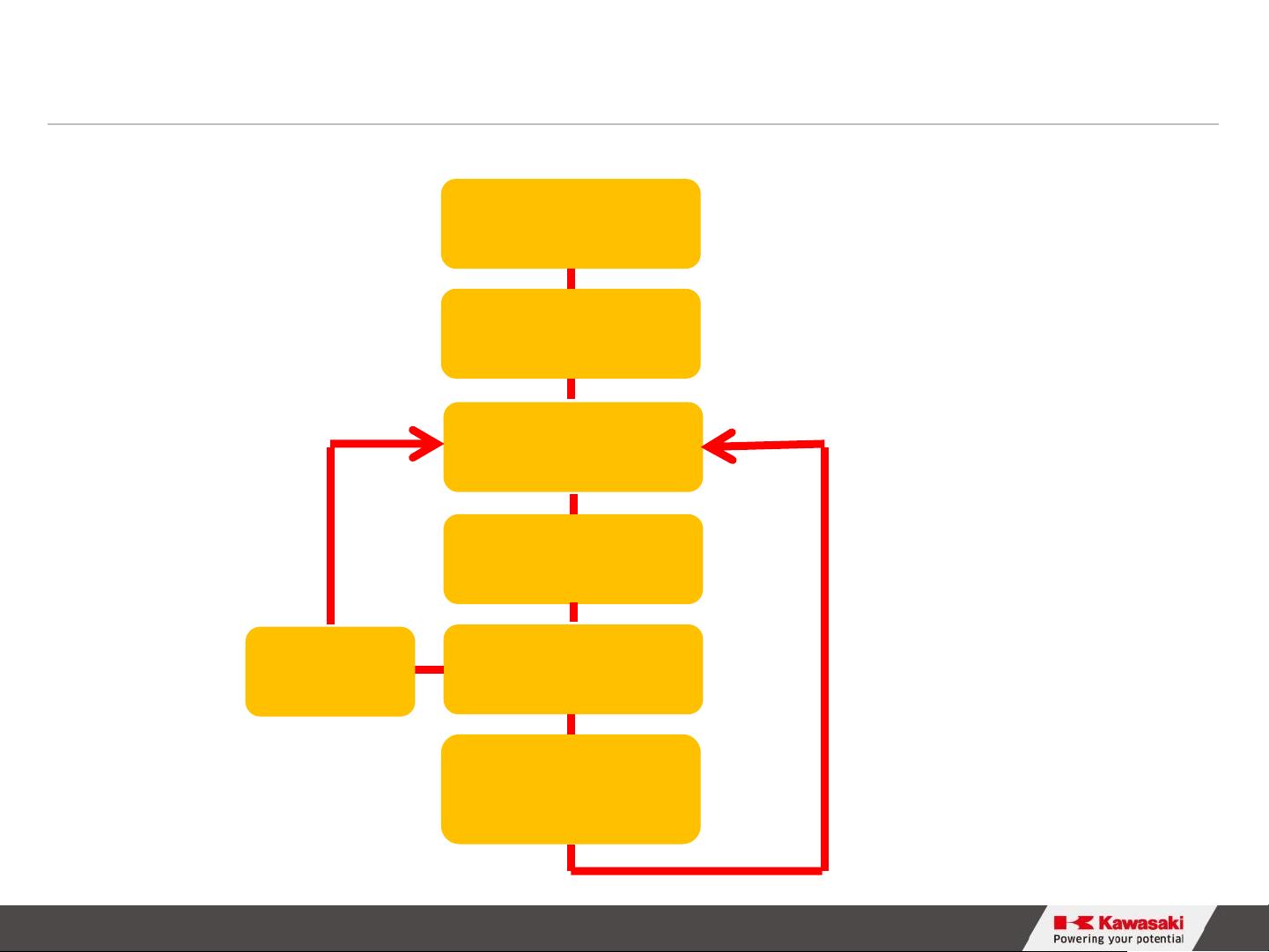
1. 码垛程序流程图:展示了整个码垛过程的逻辑结构,从接收到来料信号开始,经过选择垛型、计算放置点、过渡点,再到最终完成码垛并发送信号到PLC或上位机。
2. 主程序及动作程序:主程序负责初始化机器人运行环境,确保所有必要的信号检查已完成,避免潜在的安全风险。它会循环扫描各个生产线,一旦满足动作条件,就会调用对应的动作程序。动作程序则负责具体的操作,如放置物品并进行计数。
3. 放置位置的阵列:根据不同的垛型需求,需要预先计算出物品的准确放置位置,这个过程可能在循环前进行,以提高效率。
4. 过渡点计算:码垛过程中可能存在需要机器人移动到不同位置的情况,这涉及到计算路径上的过渡点,确保机器人动作流畅。
5. 码垛布局参考及模拟视频目录:提供了实际操作的参考和可视化工具,帮助用户理解和模拟码垛过程,便于优化和调试。
6. 计数管理:码垛完成后,通过计数系统确认满垛,此时PLC或上位机会控制托盘准备和出料,确保流程无缝衔接。
总结来说,这份说明书详细解释了如何利用AS语言创建高效的码垛程序,涵盖了从编程语言基础到实际操作的各个环节,是川崎机器人码垛应用的重要参考资料。通过学习和实践,工程师可以灵活地在生产环境中应用这些技术,提升生产效率和产品质量。
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
4
一 码垛程序的制作流程图及实例说明
进入码垛动作
选择垛型,算点
进入主程序扫描来
料信号和托盘信号
判断计数
运行前初环境始化
信号
计数不足
时
计数满垛时输出
码垛完成信号,复
位计数
注:当码垛完成信号
输出时,PLC侧应立
即切断相应的托盘准
备好信号
剩余16页未读,继续阅读
2023-07-15 上传
2021-08-13 上传
2023-02-10 上传
2022-11-23 上传

weixin_43336273
- 粉丝: 3
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
