ARM芯片控制的电脑鼠走迷宫设计与实现
需积分: 19 85 浏览量
更新于2024-07-27
收藏 1.08MB PDF 举报
"电脑鼠综合设计,涵盖了硬件设计和算法思想,主要应用于自动走迷宫的微型机器人。项目中使用了ARM系列芯片作为控制核心,采用crosswork作为开发工具,并利用stellaris驱动库进行编程。电脑鼠具备微处理器、前视距离探测器和驱动机构,能在迷宫中寻找最佳路径。在竞赛中,电脑鼠需要探索并记忆迷宫,通过算法处理找出到达目的地的最优路线。开发过程中使用了CrossWorks for ARM作为编译器,支持ARM7、ARM9和Cortex-M3内核的微处理器开发和调试。具体硬件上,选用了LM3S102处理器,该处理器是一款32位ARM Cortex-M3微控制器,负责控制和处理红外传感器的数据,驱动电机调整小车路径。"
在这个综合设计中,电脑鼠的硬件部分主要包括微控制器、前视距离探测器和驱动机构。微控制器,如LM3S102,是整个系统的中枢,负责接收和处理来自传感器的信息,并控制电机的动作。前视距离探测器通常采用红外传感器,用于探测前方障碍物的距离,帮助电脑鼠感知迷宫环境。驱动机构则是实现小车移动的关键,通过编码器反馈的信息调整电机转速,实现精准的路径控制。
软件部分,设计团队使用了CrossWorks for ARM这一专业开发环境,它包含编译器、库函数以及集成开发环境,支持对ARM架构的微处理器进行编程。stellaris驱动库提供了C语言接口,简化了开发者的工作,使得理解和编程更为直观。在算法层面,电脑鼠需要具备路径规划和决策能力,可能涉及到搜索算法如Dijkstra算法或A*算法,以及实时传感器数据处理策略。
项目中,成员可能需要分工合作,有的人负责硬件设计和搭建,包括电路设计和传感器的布局;有的人负责编写控制程序,实现迷宫探索和路径规划;还有的人负责整体系统的调试和优化。通过这样的综合设计,参与者不仅可以提升硬件设计和编程技能,还能深入理解自动控制和人工智能的基础原理。最后,项目总结和源代码的分享有助于团队成员反思和学习,也方便其他研究者参考和改进。
API函数的解析:
GPIOPinIntStatus():获取所选的GPIO端口的所有管脚的中断状态。返回一个位填充的字节,
在这个字节中置位的位同来识别一个有效的屏蔽或原始中断。
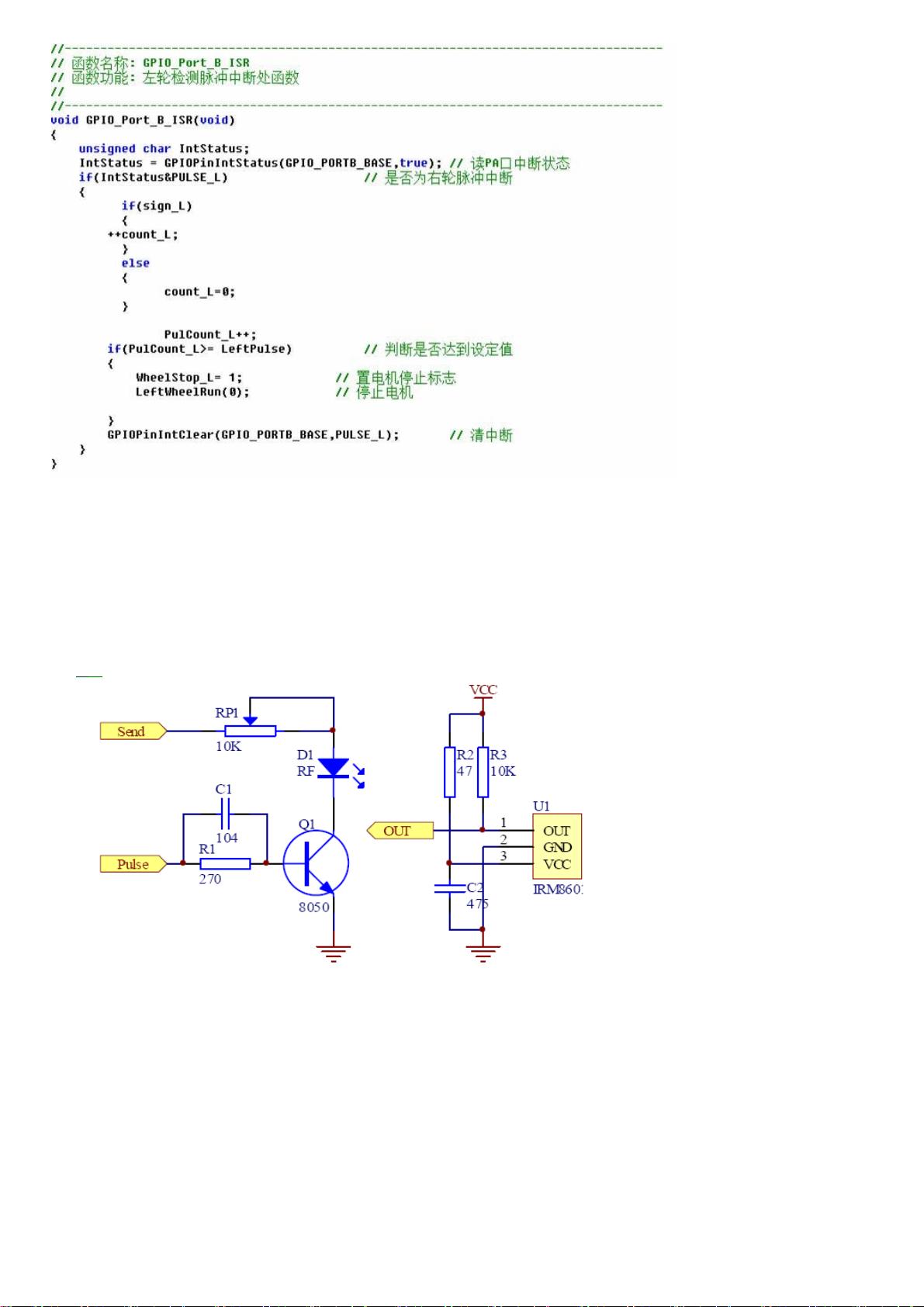
2.2.9红外检测电路
2.2.9.1调制红外信号
采用脉冲调制的反射式红外发射-接收传感器。考虑到环境干扰主要是直流分量,如果采
用带有交流分量的调制信号,在平均电流不变的情况下,瞬时电流可以很大,这样也大大提高
了信噪比,可以有效避免外界环境变化对系统检测精度的影响。
电路原理图如图2所示,由可调电阻R1,红外线发光管D1和三极管Q1构成的电路为红外
线发射电路。R1可以调节红外线发光管的发光强度,Q1起驱动作用。
图2
红外电路原理图
在接收电路中,U1为一体式红外线接收传感器IRM8601S,,它内部集成自动增益控制电
路、带通滤波电路、解码电路及输出驱动电路。但由于它是开漏输出,所以输出端需接一个上
拉电阻,见图2中的R3。其中R2是限流电阻,C1滤出电源高频干扰。
IRM8601S是一体式红外线接收传感器,它内部集成自动增益控制电路、带通滤波电路、
解码电路及输出驱动电路。当连续收到38KHz的红外线信号时,将产生脉宽10ms左右的
低电平。如果没有收到信号,便立即输出高电平。如图2.4所示,Pulse为发射控制端,高
电平时发射38KHz的红外信号。Out为接收输出端,低电平表示收到信号。
2.2.9.2用红外进行挡板检测
Micromouse中文名为“电脑鼠”,电脑鼠在迷宫中行进时是靠侦测路面情况前进的。
它的左右传感器不但要检测是否存在支路(没有挡板就是一条支路)还要避免和挡板碰触。
因此电脑鼠每一侧在正常情况就需要两组红外传感器,一组检测稍微远一点的距离,判断
是否存在支路,一组检测稍微近一点的距离,判断是否即将碰触挡板。如果是,则要进行微
2010-12-14 data.eefocus.com/upload/2008/g01/
data.eefocus.com/upload/2008/g01/ 6/32
剩余31页未读,继续阅读
2012-12-01 上传
2018-05-06 上传
2011-04-30 上传
2021-07-13 上传
2021-05-25 上传
2021-09-21 上传
2013-05-12 上传
2022-09-24 上传
2021-10-16 上传

lengeux
- 粉丝: 1
- 资源: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
