深度优先与广度优先搜索:图的探索算法详解
需积分: 10 68 浏览量
更新于2024-07-20
收藏 703KB PDF 举报
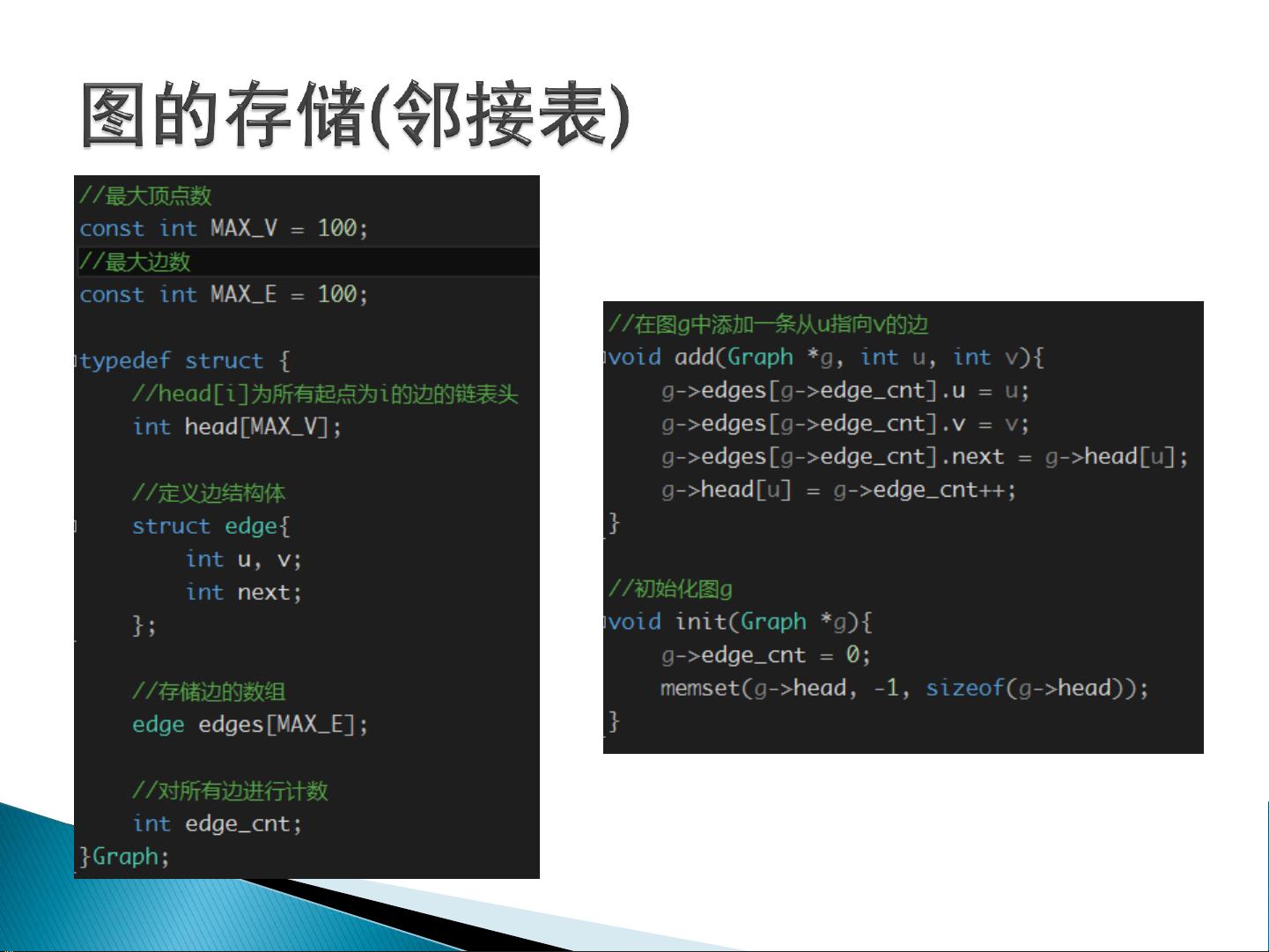
深度优先搜索(DFS)与广度优先搜索(BFS)是两种常用的图遍历算法,适用于初学者和有搜索基础知识的人深入理解。在图论中,图被定义为一个二元组(V,E),其中V是顶点集,E是边集,描述了顶点间的关系。图可以分为有向图、无向图、简单图和多重图,每种类型的图有不同的存储方式。对于小规模简单图,通常使用邻接矩阵(二维数组)存储;大规模图或多边图则更常采用邻接表来表示。
搜索算法是一种利用计算机的强大计算能力,通过穷举可能情况来找到问题解决方案的方法。在图搜索中,我们构建解答树,从初始条件出发,根据扩展规则逐层探索,直至找到目标。BFS的特点是“广度优先”,即首先搜索当前层的所有节点,再深入下一层,用队列数据结构实现。其核心步骤是沿着路径尽可能深地探索,遇到未访问过的节点就标记,直到搜索完所有可达节点。
DFS则是“深度优先”,从起点开始,尽可能深地走一条路径,遇到死胡同(即所有可达节点都已访问)后回溯至上一个节点,继续尝试其他路径,直到找到所有可达区域。递归和非递归实现都是DFS的关键策略。DFS通常使用堆栈数据结构,搜索次数等于不同区域的数量。例如,可以通过这两种算法解决图的连通性问题,如判断是否有路径连接两个特定的顶点,或者在油田地图中识别独立的有油区域。
针对油田地图的问题,BFS和DFS都可以用来找出所有独立的有油区域。BFS从一个起点开始,逐个检查周围八邻域,直到无法找到新区域,而DFS则从任意顶点出发,不断探索直到覆盖所有区域。无论使用哪种方法,最终调用次数都会等于区域数量。在农夫约翰追牛的例子中,搜索算法可以帮助确定牛可能逃到的位置,以及这些位置是否构成连通区域。
总结来说,深度优先搜索和广度优先搜索是图论中基础且实用的算法,它们在各种场景中都能发挥关键作用,尤其是在解决连通性问题、区域划分和路径查找等问题时。理解并掌握这两种算法,能够提升编程和问题解决的能力。
剩余19页未读,继续阅读
点击了解资源详情
505 浏览量
424 浏览量
1188 浏览量
172 浏览量
198 浏览量
140 浏览量
129 浏览量

ninesun127
- 粉丝: 152
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







最新资源
- EasePDF - Free Online PDF Tools-crx插件
- codeforces_contest_scoreboard
- torch_cluster-1.5.5-cp38-cp38-win_amd64whl.zip
- config:适用于Node.js的简单Yaml Config
- 带筛选的垂直导航菜单展开收缩
- eclipase.rar
- 把握变革PPT
- perfin后端:轻松实现个人理财
- aqnfmzsxt3.gapyBRM
- RHTRH – Raise Hand To Raise Hand-crx插件
- torch_sparse-0.6.2-cp37-cp37m-linux_x86_64whl.zip
- tuk-power:演讲趋势和概念的硬件优化基准I
- 企业文化理论(12个文件)
- SpeechLib.rar
- JavaCryptoApp
- leetcodeGoogle:Google集合中的leetcode问题
