STM32驱动的自动往返电动车控制系统设计与实现
版权申诉
53 浏览量
更新于2024-06-29
收藏 849KB PDF 举报
本文详细介绍了基于STM32F103控制的自动往返电动小汽车的设计项目。该项目由湖南科技大学信息与电气工程学院的学生完成,专业背景为电子信息工程二班。设计的核心是利用STM32F103这款高性能、低功耗的32位ARM Cortex-M3微处理器,作为整个车载控制系统的中心。
STM32F103因其丰富的资源、良好的通用性和高效能,被选为小汽车控制系统的关键组件。该系统采用了反射式红外传感器进行路面黑线检测,通过PWM(脉冲宽度调制)技术精确控制电动机的速度,确保车辆能在限速和压线情况下保持稳定运行。软件设计上,采用了模糊控制算法进行速度调节,这使得车辆在调速过程中能够实现平滑过渡,提高位置控制精度,并支持恒速控制。
小车不仅能够在直线路径上进行加速、急刹车、停车和倒车返回等多种运动模式,还具备自动记录和显示往返时间以及行驶距离的功能,并通过蜂鸣器提供返回起点的提示。此外,设计者还借助MATLAB进行了仿真验证,确保了从高速到低速的平稳过渡。
文章强调了STM32F103在嵌入式系统领域的广泛应用,特别是在汽车电子、工业控制系统、医疗器械和玩具等行业的优势。通过集成Cortex-M3的高性能、低功耗特性和创新的外设,STM32F103成为智能小车控制系统设计的理想选择,体现了设计者对其技术性能的高度认可和实际应用价值的深入理解。
总结来说,这篇设计报告展示了STM32F103在自动往返电动小汽车控制系统中的关键作用,从硬件选择到软件算法,再到实际功能演示,全面展现了这一技术在现代自动化驾驶领域的实践应用。
运算、处理能力,来实现小车自动识别路线按迹行走、躲避障碍物,并且通过
LCD 显示器实时显示小车运动参数;配置 STM32F103 通用定时器为 PWM 输出
模式产生 PWM 波,通过步进调节 PWM 波占空比参数控制电机的转速。
第一章 系统方案论证与分析
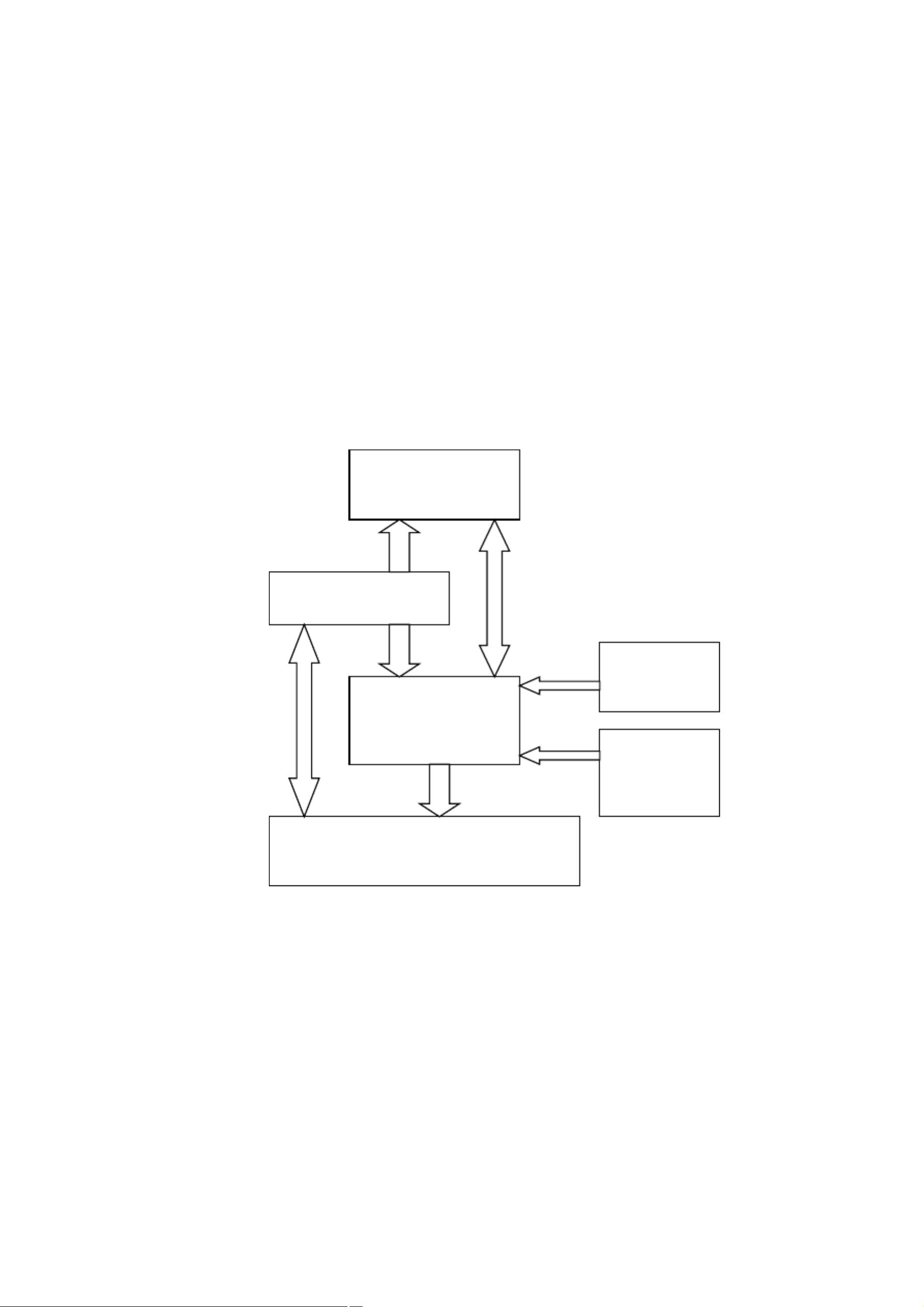
根据题目中的设计要求,本系统主要由主控单片机模块、电源模块、电机驱
动模块、黑线检测模块、测速模块以及液晶显示模块构成。本系统的方框图如下
图所示:
L298 电机驱动芯片
电源模块
测速模块
STM32
黑 线 检 测 模
块
TFT 显示
1、 主控单片机
根据题目要求,控制器主要用于控制电机的运动,黑线的检测以及相关信息
的显示。对于控制器的选择主要有以下两种方案:
方案一:采用 51 系列单片机作为控制器。51 系列单片机应用广泛,技
术成熟,但是运行速度慢,内部资源较少,且只有2 个定时计数器,不满足题目
要求。
方案二:采用 STM32 作为控制器。基于 Cortex- M3 内核的 STM32F10x 系
列芯片是新型的 32 位嵌入式微处理器,其性能优良,移植性好,提高了对直流
1
剩余14页未读,继续阅读
2022-11-12 上传
107 浏览量
2024-11-02 上传
2024-11-02 上传
2024-11-10 上传
2024-11-02 上传
837 浏览量
135 浏览量

G11176593
- 粉丝: 6927
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







