飞思卡尔8位单片机MC9S08的CAN通信详解
需积分: 22 74 浏览量
更新于2024-07-25
收藏 276KB PPT 举报
"飞思卡尔8位单片机MC9S08 16 CAN通信接口"
飞思卡尔的MC9S08系列是一款8位微控制器,其中包含了针对CAN(Controller Area Network)通信的支持。CAN通信是工业自动化和汽车电子领域广泛采用的一种通信协议,以其高效、可靠和实时性而闻名。
15.1现场总线概述
现场总线是工业自动化中的关键组成部分,它替代了传统的点对点连接,使得多个设备可以共享一条通信线路。这种通信方式降低了布线成本,提高了系统的灵活性和可靠性。CAN作为现场总线的一种,具有较高的数据传输速度和强大的错误检测能力,适用于多种应用场景,如汽车电子、工业自动化、楼宇自动化等。
15.2CAN技术规范
- 报文(Message):CAN通信中,数据以报文的形式在网络中传输,每个报文包含特定格式的数据,长度有限且受控。
- 信息路由(Information Routing):CAN不使用传统的站地址,而是通过报文的标识符(ID)进行信息筛选,接收节点根据ID决定是否接收报文。
- 位速率(BitRate):每个CAN网络的传输速率是恒定的,确保所有节点在同一速率下工作。
- 优先权(Priority):报文的优先级由其ID决定,ID数值越小,优先级越高。
- 远程数据请求(Remote Data Request):节点可以通过发送远程帧请求其他节点的数据。
- 多主机(Multimaster):CAN网络允许多个节点同时尝试发送报文,但只有一个具有最高优先级的节点能成功获取总线使用权。
- 仲裁(Arbitration):当多个节点同时试图发送报文时,通过比较ID进行逐位仲裁,避免冲突。
- 错误标定和恢复时间(Error Signaling and Recovery Time):节点检测到错误时,会立即停止传输并标记错误,然后在规定时间内重新发送报文,确保网络的稳定运行。
- 故障界定:CAN协议还包含了故障界定机制,用于识别和隔离网络中的故障节点,以保护其他正常运行的设备。
在飞思卡尔的MC9S08单片机中,集成的MSCAN08模块提供了实现CAN通信的硬件支持,包括必要的接口电路和控制器,允许开发者轻松地进行软件编程以实现CAN功能。编程结构通常包括初始化设置、报文过滤、发送和接收操作等步骤,通过配置模块寄存器实现不同功能。例如,开发人员需要设定波特率、报文过滤规则,并编写中断服务程序来处理发送和接收事件。
MC9S08单片机的CAN通信接口使得开发者能够构建高效、可靠的分布式控制系统,尤其适用于需要实时通信和高容错性的应用。通过深入理解CAN协议和技术规范,结合飞思卡尔的单片机特性,开发者可以充分利用这一强大的通信技术。
15.2 CAN技术规范
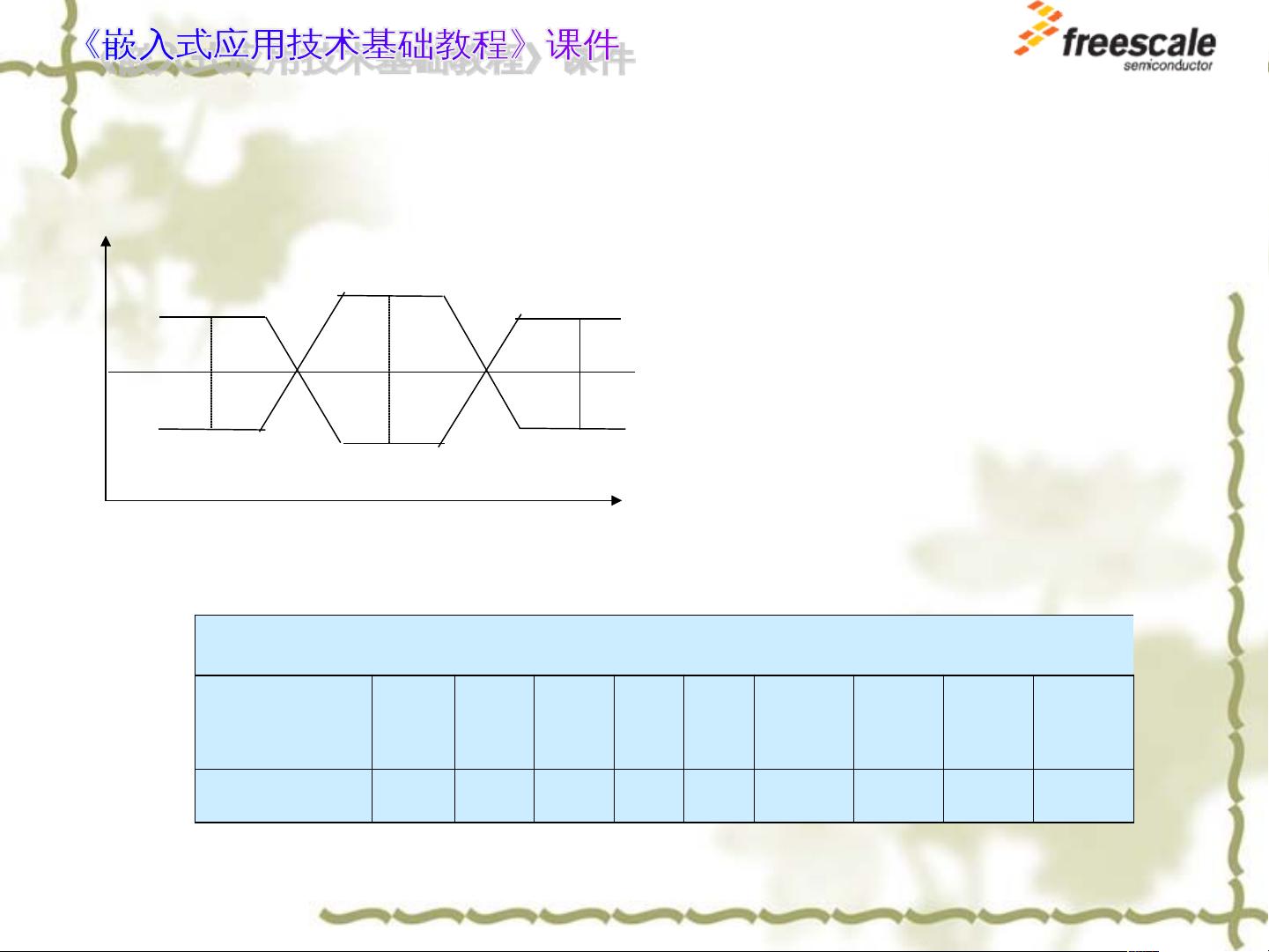
15.2.2 CAN 总线的位数值表示与通信距离
CAN 总线上用显性 (Dominan
t) 和隐性 (Recessive) 两个互补的
逻辑值表示 0 和 1 。当在总线上出
现同时发送显性位和隐性位时,总
线上数值将出现显性。如左图。
V
时间 t
隐性位 显性位
隐性位
Vdiff
Vdiff
VCAN-
H
VCAN-L
总线位的数值表示
Vdiff
CAN 总线上任意两单元最大距离及位速率对应表
位速率 /kbp
s
1000 500 250 125 100 50 20 10 5
最大距离 /m 40 130 270 530 620 1300 3300 6700 10000
剩余29页未读,继续阅读
266 浏览量
点击了解资源详情
499 浏览量
198 浏览量
343 浏览量
点击了解资源详情
2023-07-03 上传
597 浏览量

u010220932
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- correlaid-tidytuesday:用于收集CorrelAid成员在本工作日的分析和结果的存储库
- RangeLight
- 使用Arduino控制高达65,280个继电器-电路方案
- KUKA机器人 LBR iiwa 7 R800的3D数模
- 行业分类-设备装置-杨氏模量测量仪中待测金属丝长度的测量方法.zip
- NUtopia-开源
- django-jwt-auth:对Django的JSON Web令牌认证支持
- NTI-final
- data-structures
- zhSwitchEn2.rar
- php订单系统可以整合支付宝接口 v1
- CyUSB.DLL类库
- 多功能风扇定时器设计,单片机DIY作品-电路方案
- CLR via C#, 4th Edition.rar
- angular-gulp-bower
- django-sitetree:Django的可重用应用程序,介绍了站点树,菜单和面包屑导航元素
