无人驾驶汽车动态避障关键技术研究
需积分: 10 29 浏览量
更新于2024-07-09
1
收藏 7.48MB PDF 举报
"该资源是一篇关于无人驾驶汽车动态障碍物避撞关键技术的博士学位论文,由黄如林撰写,导师为梁华为研究员,完成于2017年5月。论文详细探讨了无人驾驶汽车如何在复杂的交通环境中有效地识别、追踪和规避动态障碍物,以提高自动驾驶的安全性和效率。"
在无人驾驶汽车领域,动态障碍物避撞是核心技术之一,它涉及到多个关键知识点:
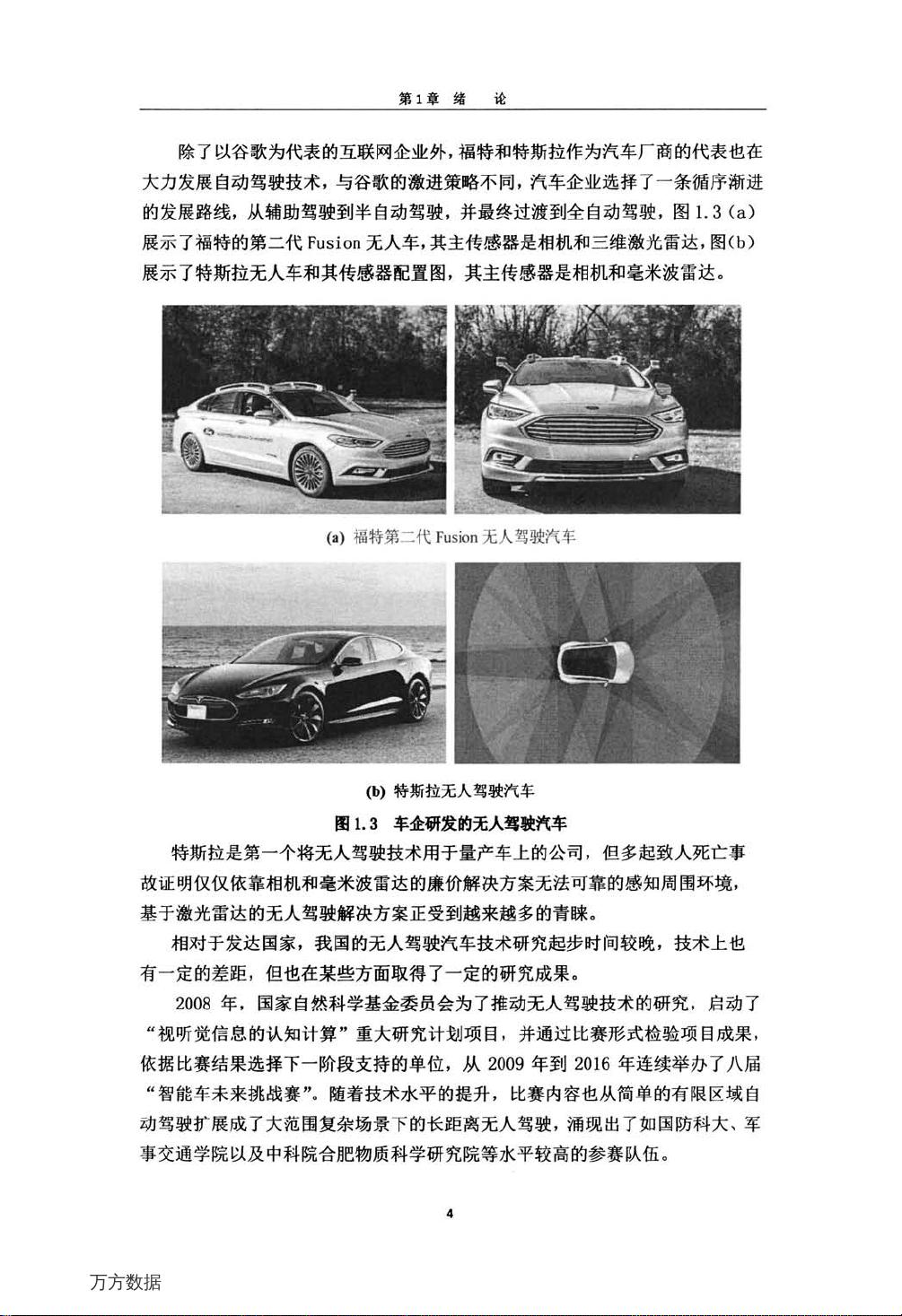
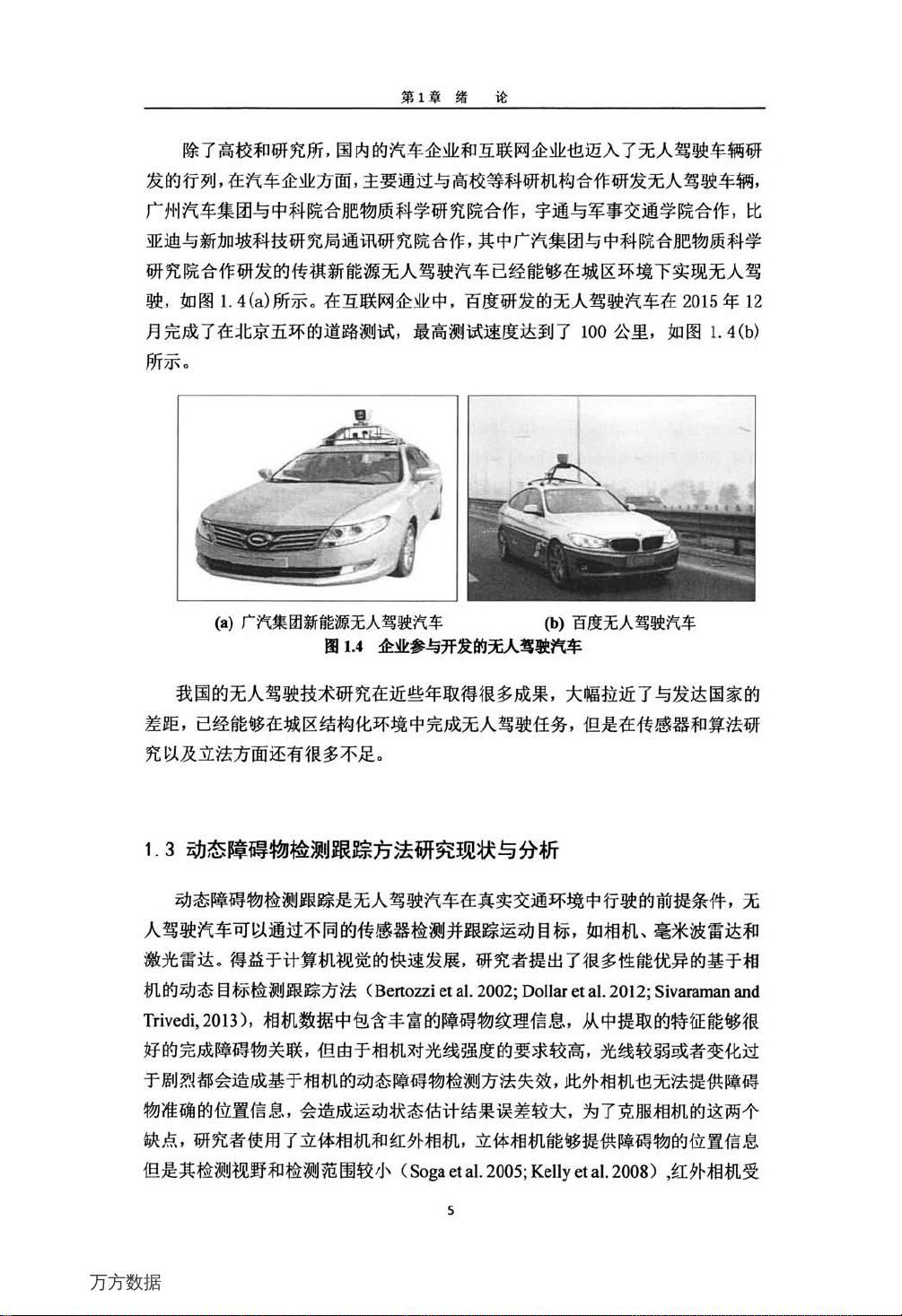
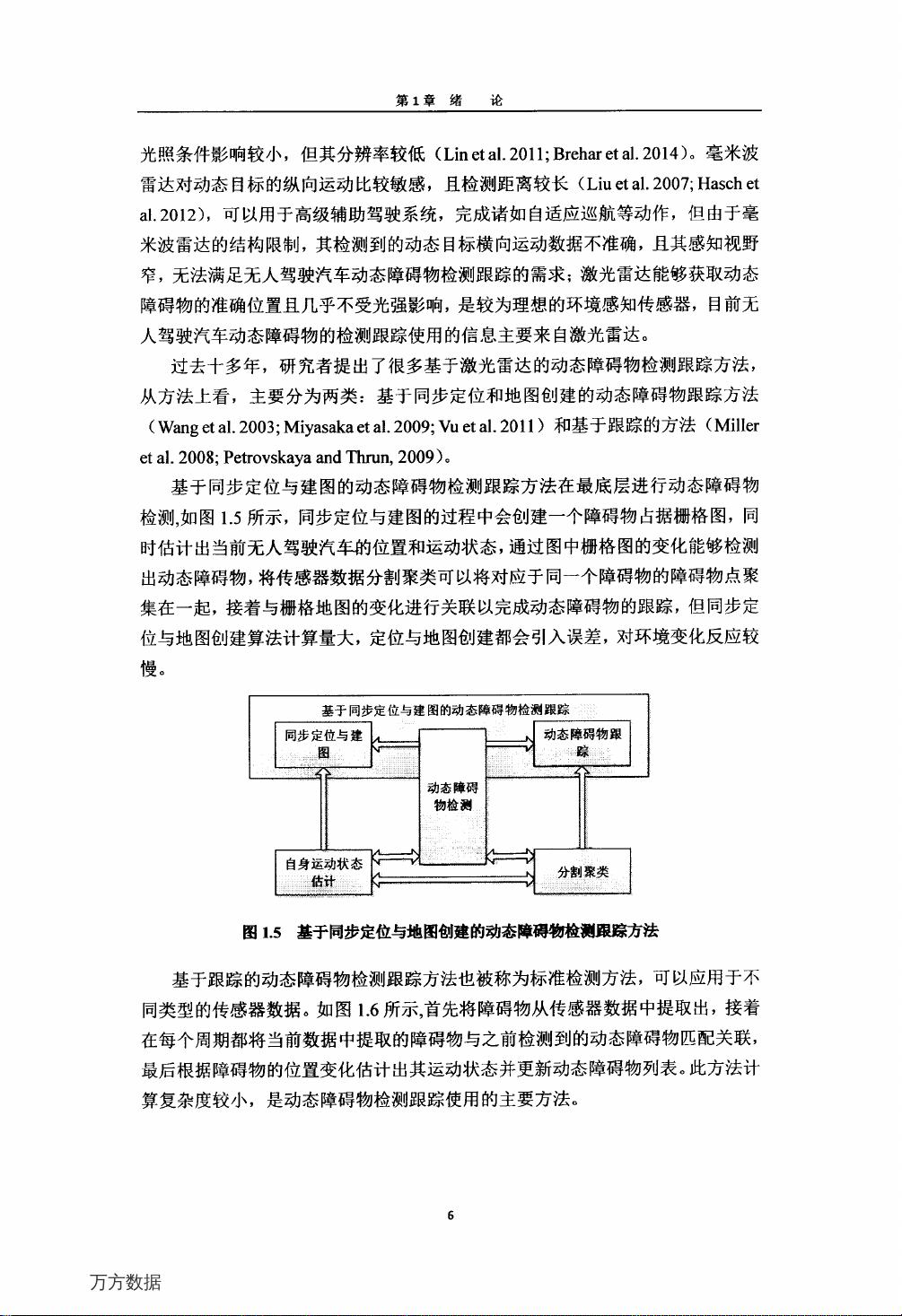
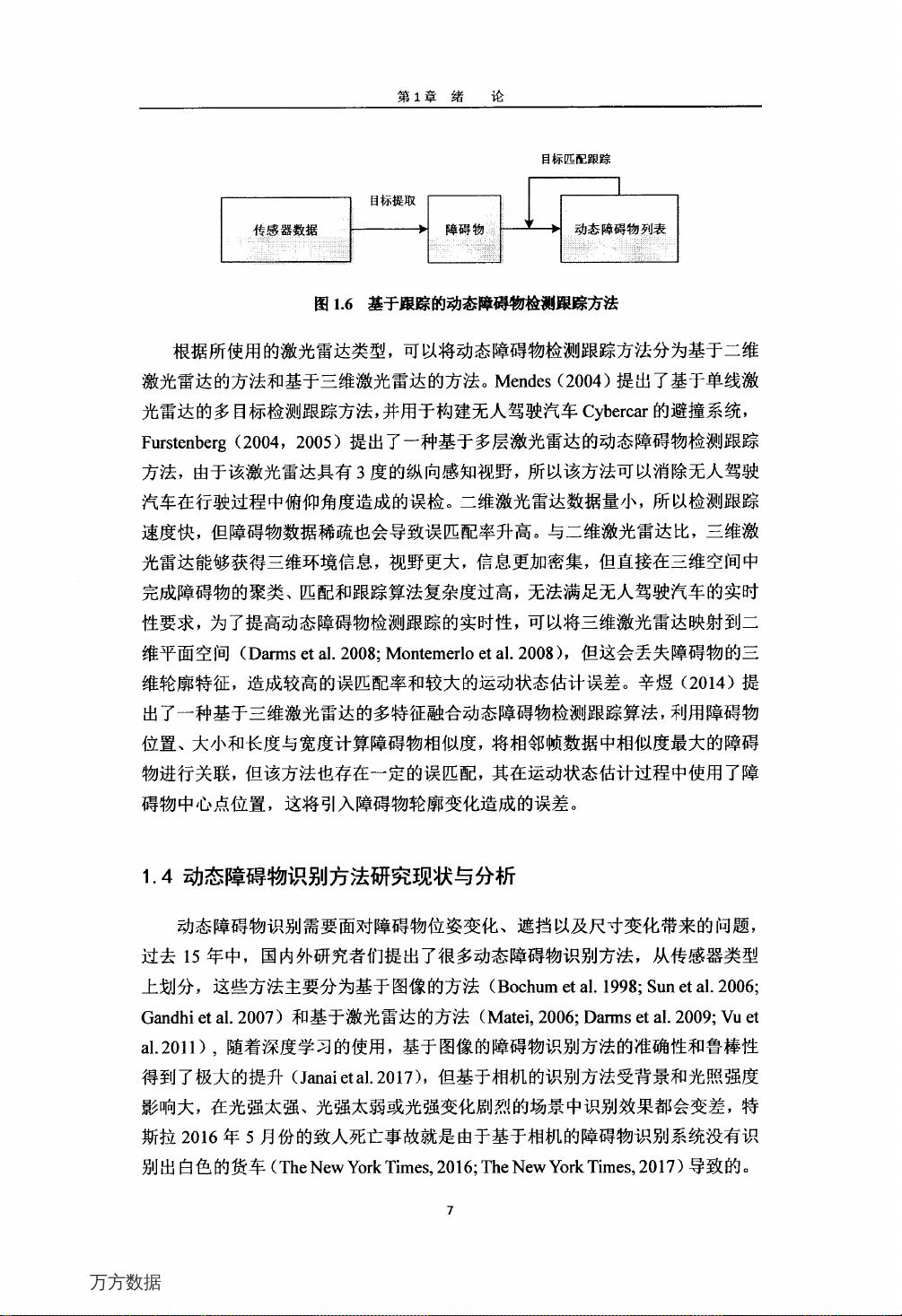
1. 环境感知:无人驾驶汽车依赖高精度的传感器,如激光雷达(LiDAR)、摄像头、毫米波雷达等,来实时获取周围环境信息,包括动态障碍物的位置、速度和运动轨迹。
2. 障碍物检测与识别:通过图像处理和机器学习算法,如卷积神经网络(CNN),对传感器收集的数据进行分析,识别出行人、其他车辆等动态障碍物。
3. 预测建模:对动态障碍物的未来行为进行预测,通常采用运动预测模型,如卡尔曼滤波、粒子滤波或基于行为的预测模型,以估计其可能的行驶路径。
4. 避障策略:根据障碍物的预测轨迹,无人驾驶汽车需要制定合理的避障策略,这可能包括路径规划、速度调整和转向控制,确保安全且平滑地避开障碍物。
5. 决策系统:在避障过程中,决策系统结合车辆自身的状态和道路规则,快速做出决策,如保持原路线、变道或紧急停车。
6. 实时性与稳定性:考虑到驾驶环境的实时性和复杂性,避撞系统需要具备高响应速度和鲁棒性,以应对各种突发情况。
7. 安全性评估:通过对避撞策略的仿真测试和实际道路试验,评估系统的安全性能,确保在各种场景下都能有效避免碰撞。
这篇论文深入研究了这些技术,并可能提供了新的算法或改进方法,以提升无人驾驶汽车在动态环境中的避撞能力,对于推动自动驾驶技术的发展具有重要意义。
万方数据
剩余109页未读,继续阅读
2021-09-20 上传
2021-09-28 上传
2024-01-08 上传
2022-05-25 上传
2020-08-30 上传
2021-07-10 上传
2022-11-19 上传
2023-02-28 上传
2021-07-16 上传

vcarlover
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
