CANoe入门教程:配置CAN总线通信工程
版权申诉
178 浏览量
更新于2024-07-10
收藏 3.82MB DOCX 举报
"这篇文档是关于使用CANoe进行汽车电子系统总线分析的入门教程,涵盖了从硬件安装、软件配置到数据库编辑的基本步骤。作者以CANoe 7.6版本为例,硬件选用CANcaseXL,通过详细的操作指南,演示了如何创建一个新的CAN工程,并使用CANdb++Editor定义总线网络、消息和信号。"
在深入讲解CANoe之前,首先要理解CAN(Controller Area Network)总线是一种用于汽车电子系统的通信协议,它允许不同设备之间高效、可靠地交换数据。CANoe是Vector公司开发的一款强大的工具,用于测试、仿真和诊断基于CAN总线的汽车电子系统。
1. **CANoe软件安装与硬件连接**:
- 安装过程包括先安装驱动程序,然后安装CANoe软件。连接CANcaseXL硬件后,可以在控制面板的Vector Hardware中检查设备是否正常识别。
- CANcaseXL支持两种CAN通道:251(高速CAN)和7269(LIN),以及一种低速CAN(1054,容错CAN)。由于CANcaseXL限制为两路通讯,用户可以根据需求组合Piggy。
2. **创建CANoe工程**:
- 新建工程时,可以选择模版,如CAN_500kBaud.tcn,创建一个波特率500K的CAN工程,并保存配置。
3. **使用CANdb++Editor**:
- 这是定义总线网络、消息和信号的关键工具。首先创建数据库,选择CANTemplate.dbc作为模板。
- 在“Network nodes”下添加节点,如Node_A和Node_B,定义它们的名称。
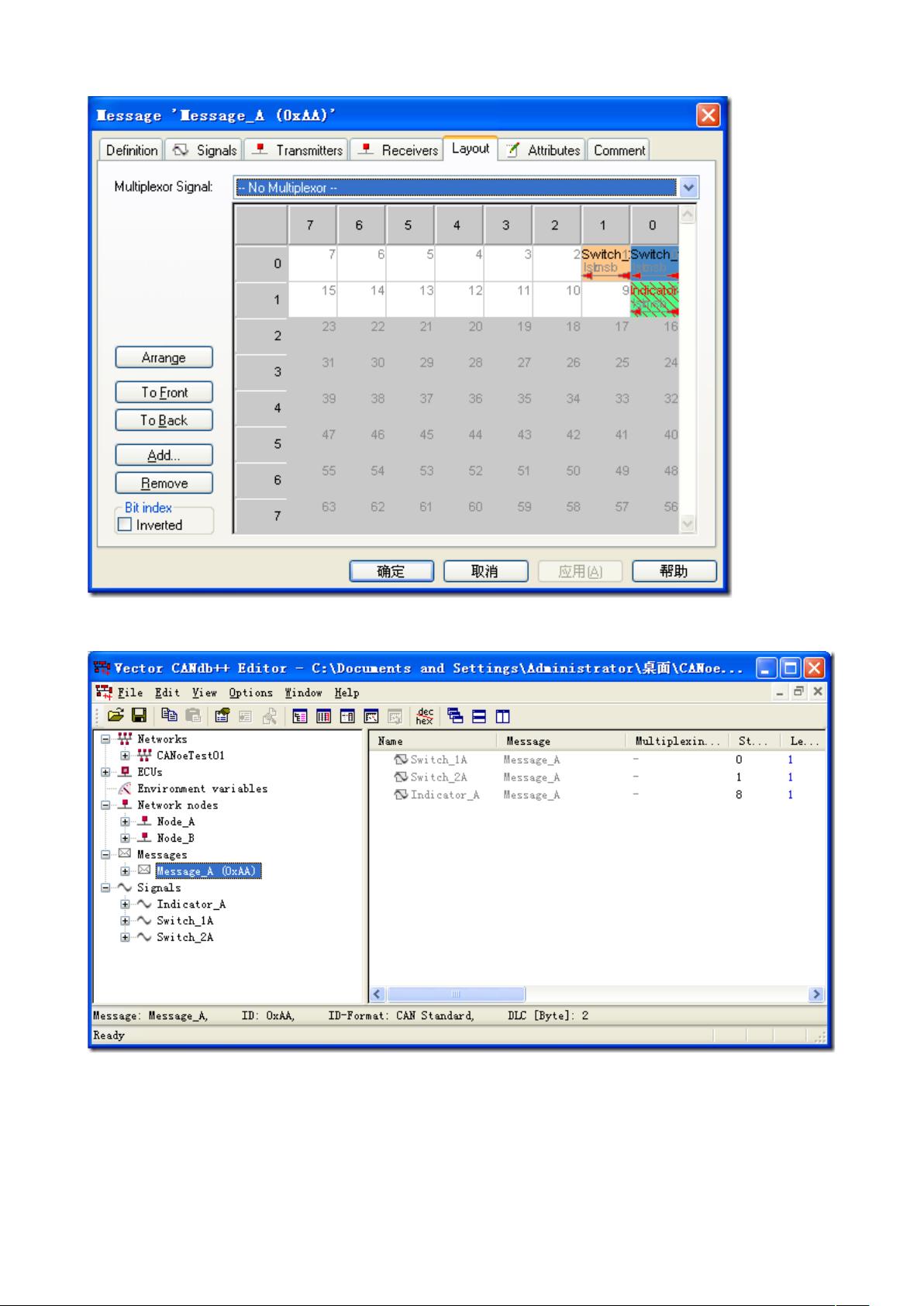
- 接着创建消息,定义其ID、DLC(Data Length Code)等属性,并指定发送节点,例如Node_A。
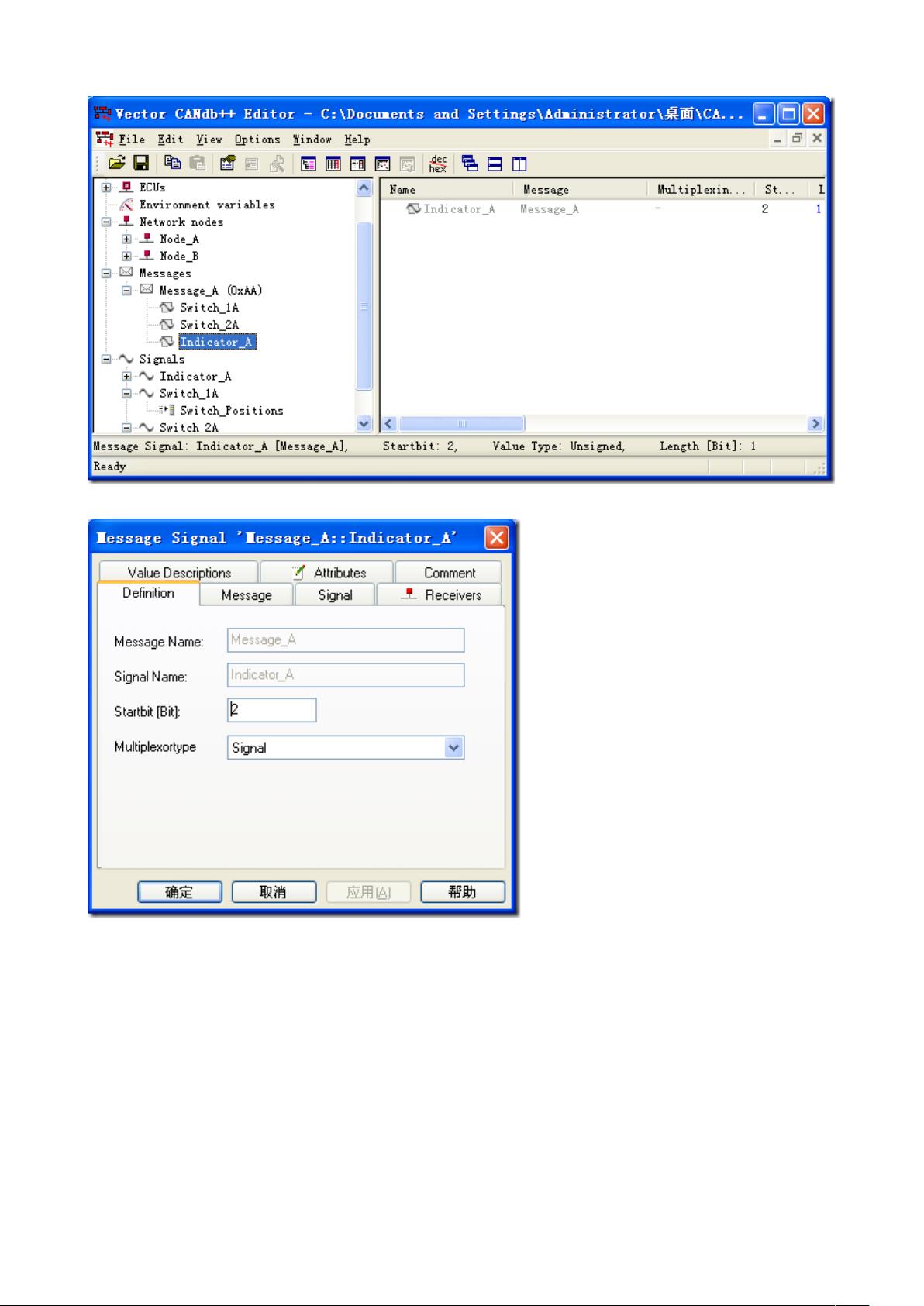
- 创建信号并将其关联到相应消息中,定义信号名称、数据类型、大小等信息。
4. **数据表示格式**:
- CAN信号的数据表示有两种模式:Intel模式和Motorola格式。Intel模式从最低有效位(LSB)开始存储数据,而Motorola模式从最高有效位(MSB)开始。
这个教程以实践操作为主,适合初学者了解和学习CANoe的基础应用。通过这些步骤,用户能够建立一个基本的CANoe工程,并开始定义自己的网络拓扑和通信行为。对于汽车电子工程师来说,掌握CANoe是进行系统级测试和调试的重要技能。
剩余37页未读,继续阅读
2021-09-30 上传
12952 浏览量
5030 浏览量
121 浏览量
403 浏览量
2024-11-11 上传
2024-11-11 上传
2024-11-11 上传
2024-11-03 上传

xiaowu0912
- 粉丝: 0
- 资源: 13万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- ASP函數大全及一些運用例子
- 锐捷网管软件RG-eNM 3.0操作手册
- spring in action
- 很好的一个开源杂志。 pdf 高清版本
- sharepoint工作流
- Java Transaction Design Strategies 事务
- Quartz开发指南
- sharepoint 性能与选型
- HP network automation System 中文说明
- The Role of Mathematics in Physical Sciences
- 计算机组成原理课后习题答案
- sharepoint中的知识管理
- Oracle 10g DBA
- Ext中文参考手册 讲解加代码
- 递归下降分析程序 编译原理实习
- Maple and Mathematica
