
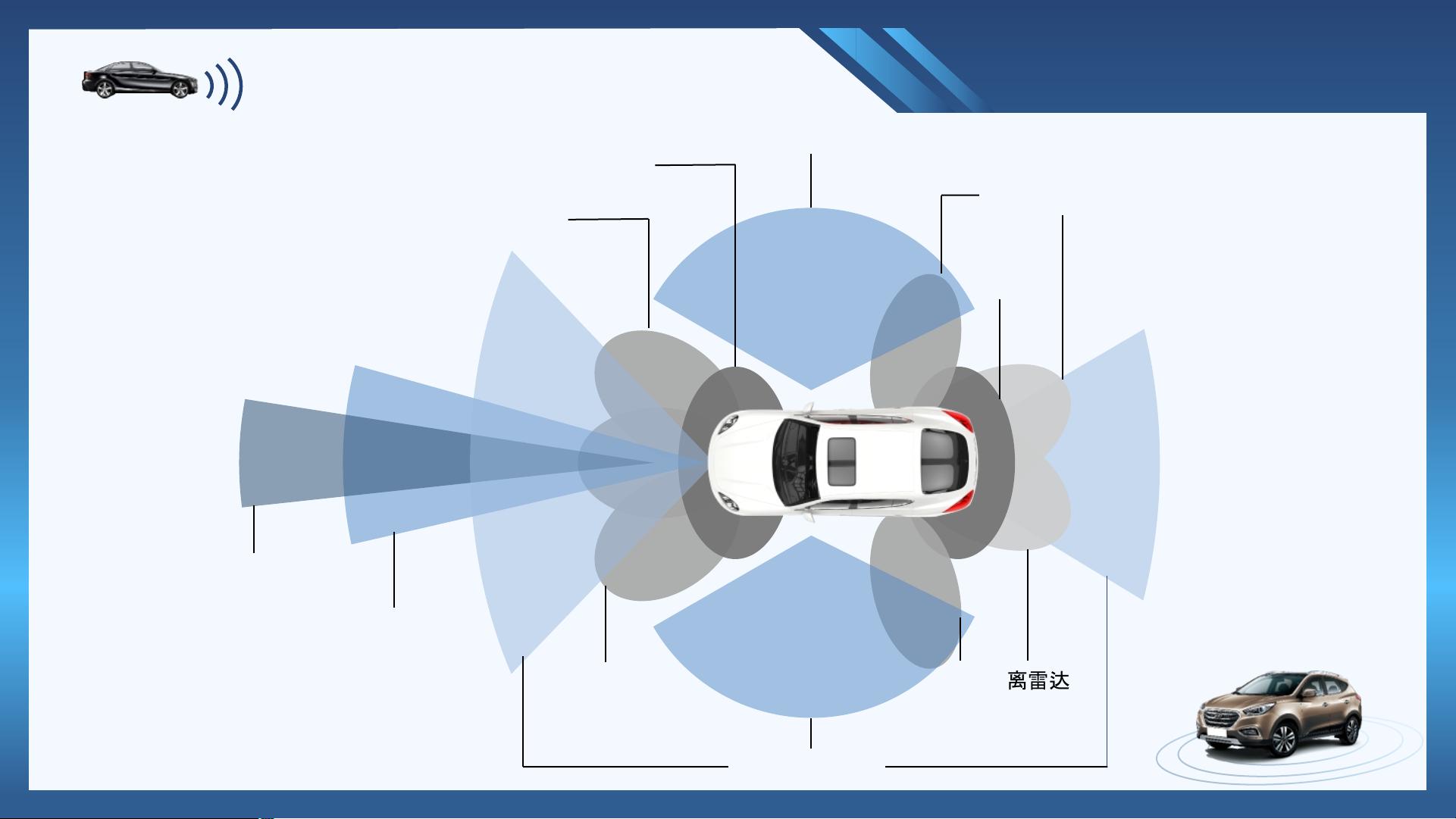
车载传感器的作用
自适应巡航
紧急制动
行人监测
碰撞避免
交通标志识别
交通信号灯识别
行人检测
障碍物检测
道路边界识别
车道线识别
车道偏离警告
车辆检测
前车碰撞预警
岔路口
交通提醒
泊车
辅助
泊车
辅助
环视
环视
盲区检测
后向碰撞预警
泊车辅助
环视
长距离雷达
激光雷达
中短距离雷达
摄像头传感器
中短距离雷达
中距离雷达
超声波雷达
摄像头传感器
中短距离雷达
超声波雷达
剩余15页未读,继续阅读

知识世界
- 粉丝: 361
- 资源: 1万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







