Peter Corke机器人工具箱教程:MATLAB版第10.3.1版详解
《Peter Corke机器人工具箱教程robot.pdf》是一份全面且深入的MATLAB Robotics Toolbox教程,由Peter Corke编著,旨在帮助用户理解和应用在机器人领域中的各种技术。该版本是第十个主要发布,标志着超过二十五年的持续研发与成熟积累,对应于2017年6月出版的第二版书籍《Robotics, Vision & Control》(RVC2)。
本教材的核心内容包括了对多种类型的机器人处理:首先,针对机械臂型的机器人,提供了丰富的功能,如运动学分析、轨迹生成、动力学建模和控制策略。这些功能对于研究和模拟工业机器人操作至关重要,帮助工程师设计、优化和测试复杂动作。
其次,对于移动机器人,教程涵盖了路径规划、基于动力学的路径规划、定位、地图构建以及同步定位与建图(SLAM)等关键技术。SLAM是一种实时地同时估计机器人位置和创建环境地图的方法,这对于无人驾驶车辆和自主导航系统尤其关键。
工具箱充分利用类结构,将机器人、传感器和地图等实体进行抽象表示,使得用户能够更加直观地管理复杂的机器人系统。此外,教程还介绍了如何集成Simulink模块,以便于在实际环境中验证和控制系统行为。
学习者可以通过这份教程掌握MATLAB Robotics Toolbox的基础知识,从而提升在机器人领域的理论基础和实践能力。无论是初学者还是高级开发者,都能在其中找到适合自己的学习材料和实用工具。该教材的开源许可协议为LGPL,这意味着用户可以在遵循特定条款的前提下自由地使用和修改代码,促进了科研和教育社区的发展。
《Peter Corke机器人工具箱教程robot.pdf》是一份值得深入研究的宝贵资源,不仅适用于学术研究,也适用于工程项目的实施和教学培训。通过学习,读者将能掌握机器人控制的各个方面,并在MATLAB环境下实现高效的设计和仿真工作。

1.1. CHANGES IN RTB 10 CHAPTER 1. INTRODUCTION
• New robot models include Universal Robotics UR3, UR5 and UR10; and Kuka
light weight robot arm.
• A new folder data now holds various data files as used by examples in RVC2:
STL models, occupancy grids, Hershey font, Toro and G2O data files.
Since its inception RTB has used matrices
1
to represent rotations and transformations
in 2D and 3D. A trajectory, or sequence, was represented by a 3-dimensional matrix,
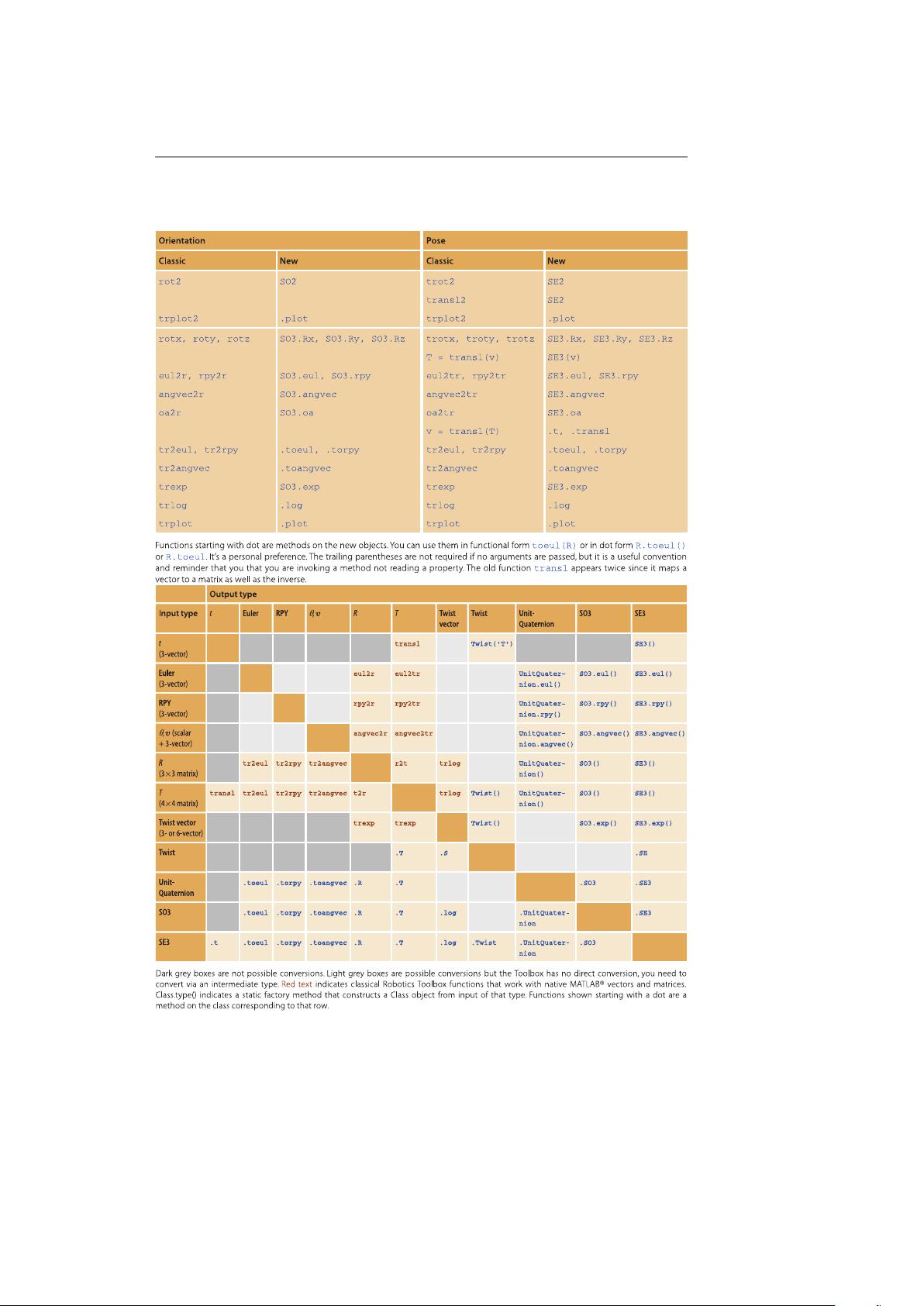
eg. 4 × 4 × N. In RTB10 a set of classes have been introduced to represent orienta-
tion and pose in 2D and 3D: SO2, SE2, SO3, SE3, Twist and UnitQuaternion.
These classes are fairly polymorphic, that is, they share many methods and operators
2
.
All have a number of static methods that serve as constructors from particular repre-
sentations. A trajectory is represented by a vector of these objects which makes code
easier to read and understand. Overloaded operators are used so the classes behave
in a similar way to native matrices
3
. The relationship between the classical Toolbox
functions and the new classes are shown in Fig 1.1.
You can continue to use the classical functions. The new classes have methods with
the names of classical functions to provide similar functionality. For instance
>> T = transl(1,2,3); % create a 4x4 matrix
>> trprint(T) % invoke the function trprint
>> T = SE3(1,2,3); % create an SE3 object
>> trprint(T) % invoke the method trprint
>> T.T % the equivalent 4x4 matrix
>> double(T) % the equivalent 4x4 matrix
>> T = SE3(1,2,3); % create a pure translation SE3 object
>> T2 = T
*
T; % the result is an SE3 object
>> T3 = trinterp(T, T2,, 5); % create a vector of five SE3 objects between T and T2
>> T3(1) % the first element of the vector
>> T3
*
T % each element of T3 multiplies T, giving a vector of five SE3 objects
1.1.3 Enhancements
• Dependencies on the Machine Vision Toolbox for MATLAB (MVTB) have been
removed. The fast dilation function used for path planning is now searched for
in MVTB and the MATLAB Image Processing Toolbox (IPT) and defaults to a
provided M-function.
• A major pass over all code and method/function/class documentation.
• Reworking and refactoring all the manipulator graphics, work in progress.
• An “app" is included: tripleangle which allows graphical experimentation
with Euler and roll-pitch-yaw angles.
• A tidyup of all Simulink models. Red blocks now represent user settable param-
eters, and shaded boxes are used to group parts of the models.
1
Early versions of RTB, before 1999, used vectors to represent quaternions but that changed to an object
once objects were added to the language.
2
For example, you could substitute objects of class SO3 and UnitQuaternion with minimal code
change.
3
The capability is extended so that we can element-wise multiple two vectors of transforms, multiply one
transform over a vector of transforms or a set of points.
Robotics Toolbox 10.3.1 for MATLAB
R
16 Copyright
c
Peter Corke 2018


剩余488页未读,继续阅读
2019-06-15 上传
2017-09-26 上传
2021-01-10 上传
2019-08-12 上传
2023-02-27 上传
2021-11-06 上传
2024-09-26 上传
2024-08-30 上传

lcj4ever
- 粉丝: 8
- 资源: 33
 我的内容管理
展开
我的内容管理
展开







