KUKA机器人外部自动配置原理与安全须知
版权申诉
本文档详细介绍了KUKA机器人如何进行外部自动配置,涉及系统结构、安全须知以及Cell.src控制程序的功能与结构。外部自动配置允许通过PLC控制机器人程序的启动、停止,并通过PLC与机器人之间的信号交换实现输入和输出的控制。
在KUKA机器人外部自动配置中,系统结构主要依赖于KR C4控制器和PLC之间的通讯。为了确保通讯顺利,外部自动运行方式被采用,使得主机或PLC可以控制机器人系统。关键文件CELL.SRC是外部选择机器人程序的控制程序,它位于“R1”文件夹中,负责处理PLC传输的程序号。
PLC与机器人之间的信号交换通过外部自动运行接口进行,接口定义了控制信号(如开始、停止、程序编号和故障确认)和机器人状态反馈(如驱动状态、位置和故障信息)。安全启动程序时,必须执行BCO运行,且选定CELL程序后需使用Cell.src控制程序。
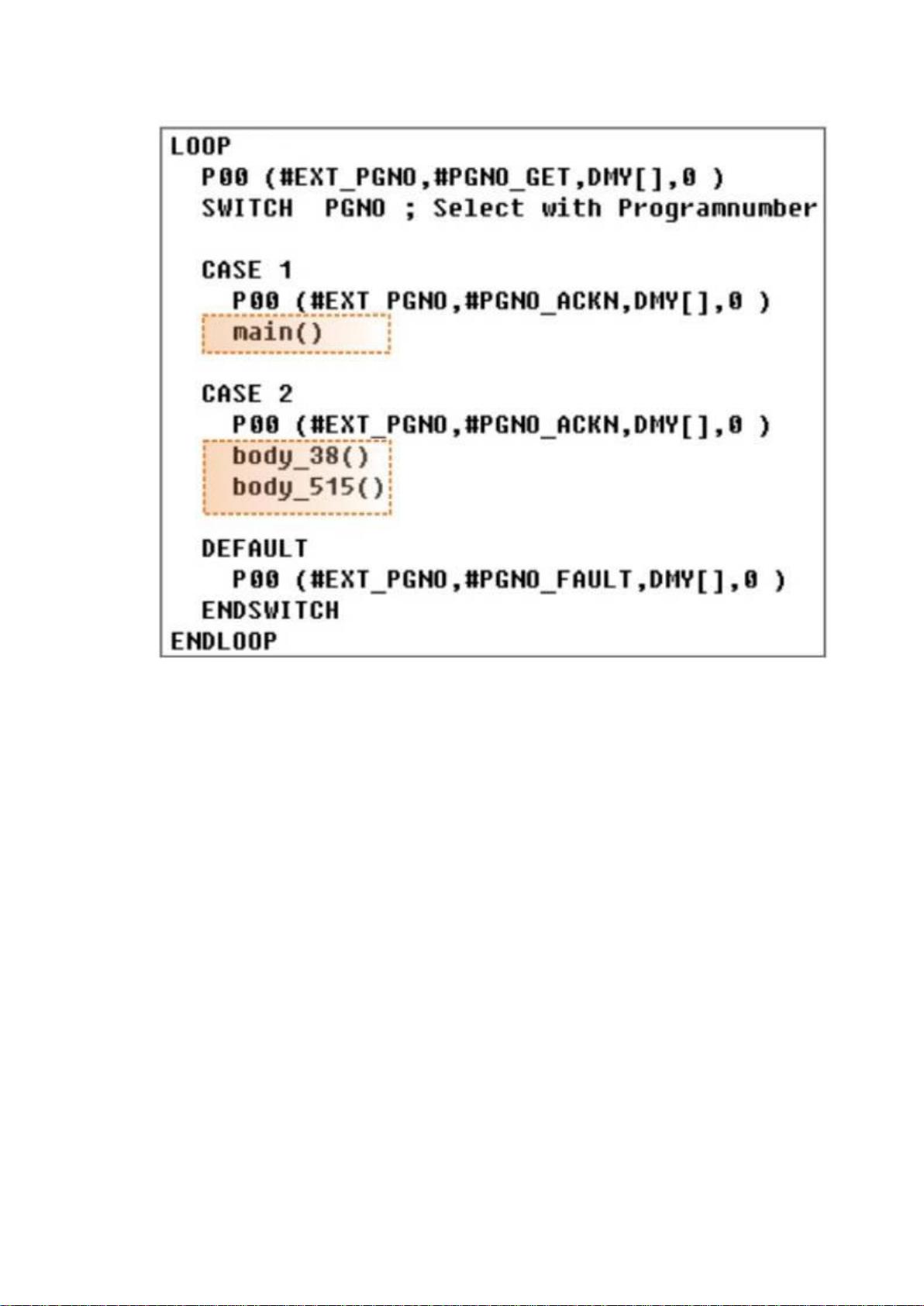
Cell.src控制程序的结构和功能包括:
1. 初始化和Home位置:设置基坐标参数,验证机器人在Home位置,初始化外部自动运行接口。
2. 无限循环:持续询问程序号,并进入已确定的程序号选择循环。
3. 程序号的选择循环:根据变量"PGNO"跳转到相应的程序分支,运行指定的机器人程序,无效的程序号则跳转到默认分支。
在实际操作中,若要更改CELL.SRC,需要遵循特定步骤,例如在专家模式下打开程序,替换"EXAMPLE"为所需程序的名称,然后保存更改。此外,对外部自动接口的输入和输出信号进行标准配置也很重要,例如:
- PERI_RDY:表示机器人控制器与主计算机通讯的驱动器接通状态。
- ALARM_STOP:在急停情况下复位此输出,正常时为1,急停时为0。
- USER_SAF:当安全栅栏监控开关开启或使能开关释放时复位,正常为1,安全门开启为0。
- STOPMESS:控制器设定的输出,用于向主计算机发送需要机器人停止的任何信息(如急停、驱动状态、操作者安全、指令速度等)。
- PGNO_FBIT_...:可能表示程序编号的标志位,具体含义取决于上下文。
了解这些知识点后,用户可以根据具体应用需求,正确配置和控制KUKA机器人与PLC之间的协同工作,实现自动化生产线上的精确任务执行。
更改外部自动接口,根据标准填写输入接口信号。
剩余15页未读,继续阅读
126 浏览量
2022-06-18 上传
252 浏览量
2023-04-05 上传

是空空呀
- 粉丝: 198
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







