




ABB机器人坐标系详解:从基座到工件坐标
下载需积分: 48 | PDF格式 | 184KB |
更新于2024-09-08
| 81 浏览量 | 举报
"abb机器人坐标系说明"
在ABB机器人技术中,理解坐标系的概念是至关重要的,因为它决定了机器人如何定位和执行任务。本资源详细介绍了几种主要的坐标系,包括大地坐标系、工具坐标系、工件坐标系以及用户坐标系。
首先,坐标系是一个数学框架,用于确定平面上或空间中点的位置。在机器人领域,这些坐标系用于指示机器人的运动和目标位置。基坐标系是固定的,位于机器人底座,方便机器人在工作空间内的移动。在基坐标系中,正X轴通常指向机器人的前方,正Y轴指向两侧,正Z轴则指向机器人的上方。
大地坐标系是全局参考系,用于描述整个工作单元或工作站,包括多个机器人或有外轴运动的设备。默认情况下,它与基坐标系重合,但可以根据需要进行调整。工件坐标系则是与具体工件相关的,用于简化对工件的操作和编程。它可以定义工件相对于大地坐标系的位置,允许机器人精确地对准和操作工件。
工具坐标系是另一个关键概念,它定义了机器人末端执行器(如焊枪或抓手)相对于工件的位置。这样,无论机器人如何移动,工具坐标系保持不变,确保工具能正确地作用于工件。
用户坐标系则是一个灵活的坐标系,用于表示其他坐标系,比如工件在不同状态下的位置。这在处理多个工件或工件在工作站内移动时特别有用。
工件坐标系的设置分为用户框架和工件框架,前者与大地坐标系关联,后者与工件本身关联。工件坐标系的优势在于,当工件在工作站中移动或更换时,只需要调整工件坐标系的位置,无需修改机器人路径,大大提高了编程效率。
理解并熟练应用这些坐标系是有效编程和控制ABB机器人工作的基础,也是优化自动化流程的关键。通过灵活地设置和利用这些坐标系,操作员能够实现更高效、更精确的机器人作业。
术语和概念说明
什么是坐标系?
<-
->
-
概述
坐标系从一个称为原点的固定点通过轴定义平面或空间。机器人目标
和位置通过沿坐标系轴的测量来定位.
机器人使用若干坐标系,每一坐标系都适用于特定类型的微动控制或
编程。
基坐标系位于机器人基座。它是最便于机器人从一个位置移动
到另一个位置的坐标系。详情请参阅基坐标系.
工件坐标系与工件相关,通常是最适于对机器人进行编程的坐
标系。详情请参阅工件坐标系.
工具坐标系定义机器人到达预设目标时所使用工具的位置。详
情请参阅工具坐标系.
大地坐标系可定义机器人单元,所有其他的坐标系均与大地坐
标系直接或间接相关。它适用于微动控制、一般移动以及处理
具有若干机器人或外轴移动机器人的工作站和工作单元。详情
请参阅大地坐标系.
用户坐标系在表示持有其他坐标系的设备(如工件)时非常有
用。详情请参阅用户坐标系.
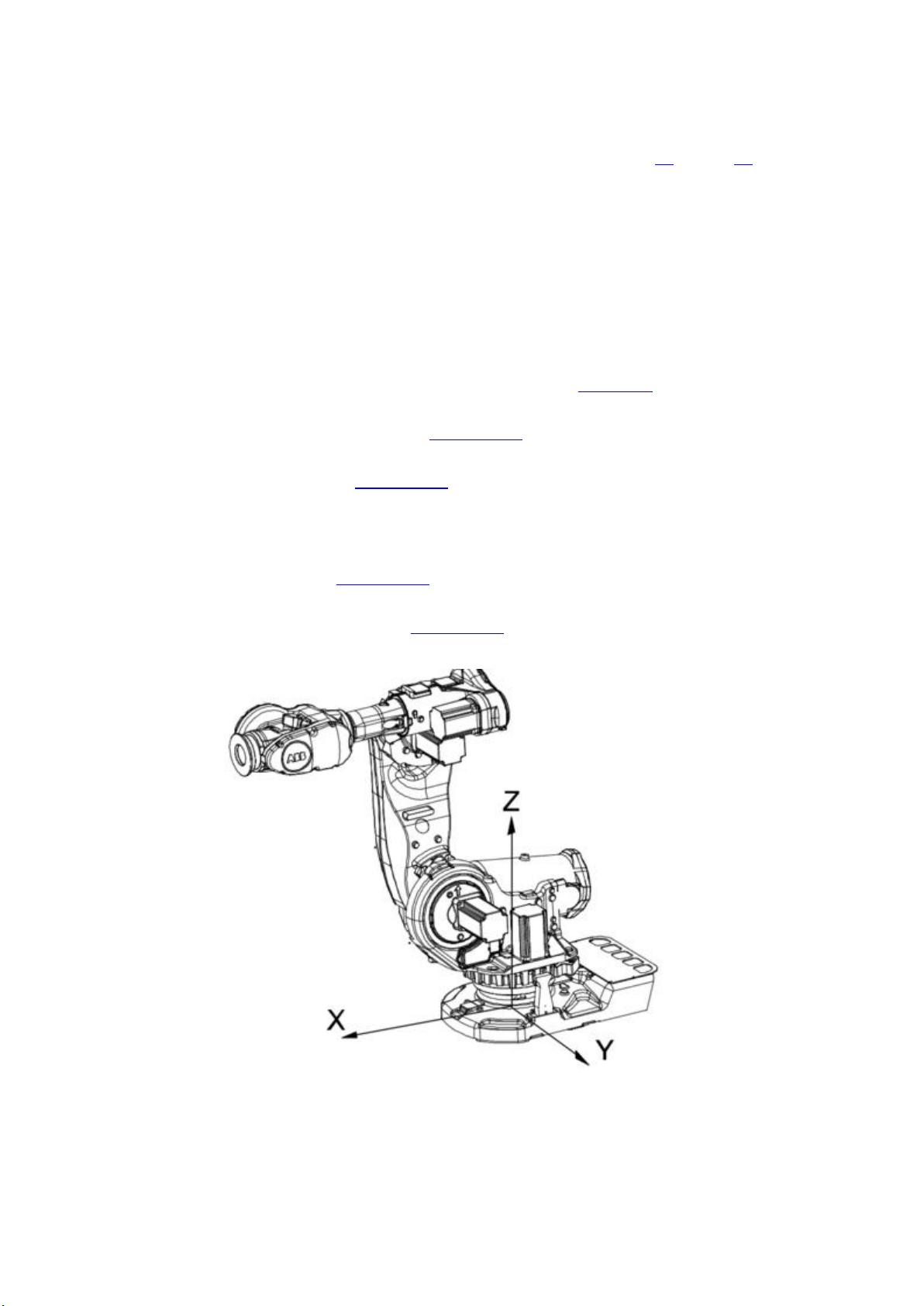
基坐标系
基坐标系在机器人基座中有相应的零点,这使固定安装的机器人的移
动具有可预测性。因此它对于将机器人从一个位置移动到另一个位置
很有帮助。对机器人编程来说,其它如工件坐标系等坐标系通常是最
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐






zeemony
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开








最新资源
- 实现Android吹一吹功能的麦克风频率监听源码解析
- 《六人行》字幕剧本解析与分享
- Laravel开发:掌握PHP Elixir修订技巧
- Linux设备驱动编程教程:十七部分深入学习
- VS2010环境下UDP通信程序开发与测试指南
- 仿多看阅读实现Android左右翻页效果示例
- 掌握WPF模板技术,个性化扩展你的UI界面
- 易语言实现窗口组件解除禁止的源码技巧
- Git for Windows 64位版本及命令速查表下载
- 使用DrawText API在PictureBox中绘制文本
- Matlab实现DTED-Egm96地形高度数据加载与显示
- SMA逆变器产品数据手册:太阳能领域的领先选择
- zVM统计信息显示:zvm-simplestats网页工具
- CSS菜单炫酷动效源码:网页美化神器
- Eclipse 3.7界面开发利器:WindowBuilder插件安装教程
- C8051F320单片机控制小车实现货源定位与灭火功能






















