
一种嵌入式运动控制器设计的实现一种嵌入式运动控制器设计的实现
运动控制技术是数控机床的关键技术,其技术水平的高低将直接影响一个国家装备制造业的发展水平。目前,
多轴伺服控制器越来越多地运用在运动控制系统中,具有较高的集成度和灵活性,可实时完成运动控制过程中
复杂的逻辑处理和控制算法,能实现多轴高速高精度的伺服控制。本文选用DSP与FPGA作为运动控制器的部
件,设计了通用型运动控制器。其中DSP用于运动轨迹规划、速度控制及位置控制等功能;FPGA完成运动控制
器的精插补功能,用于计算步进电机或伺服驱动元件的控制脉冲,同时接收并处理脉冲型位置反馈信号。本文
对该运动控制器的总体结构、硬件设计和软件设计进行了描述。 1 系统总体设计 运动控制器的总体性
能
运动控制技术是数控机床的关键技术,其技术水平的高低将直接影响一个国家装备制造业的发展水平。目前,多轴伺服控
制器越来越多地运用在运动控制系统中,具有较高的集成度和灵活性,可实时完成运动控制过程中复杂的逻辑处理和控制算
法,能实现多轴高速高精度的伺服控制。本文选用DSP与FPGA作为运动控制器的部件,设计了通用型运动控制器。其中DSP
用于运动轨迹规划、速度控制及位置控制等功能;FPGA完成运动控制器的精插补功能,用于计算步进电机或伺服驱动元件的
控制脉冲,同时接收并处理脉冲型位置反馈信号。本文对该运动控制器的总体结构、硬件设计和软件设计进行了描述。
1 系统总体设计系统总体设计
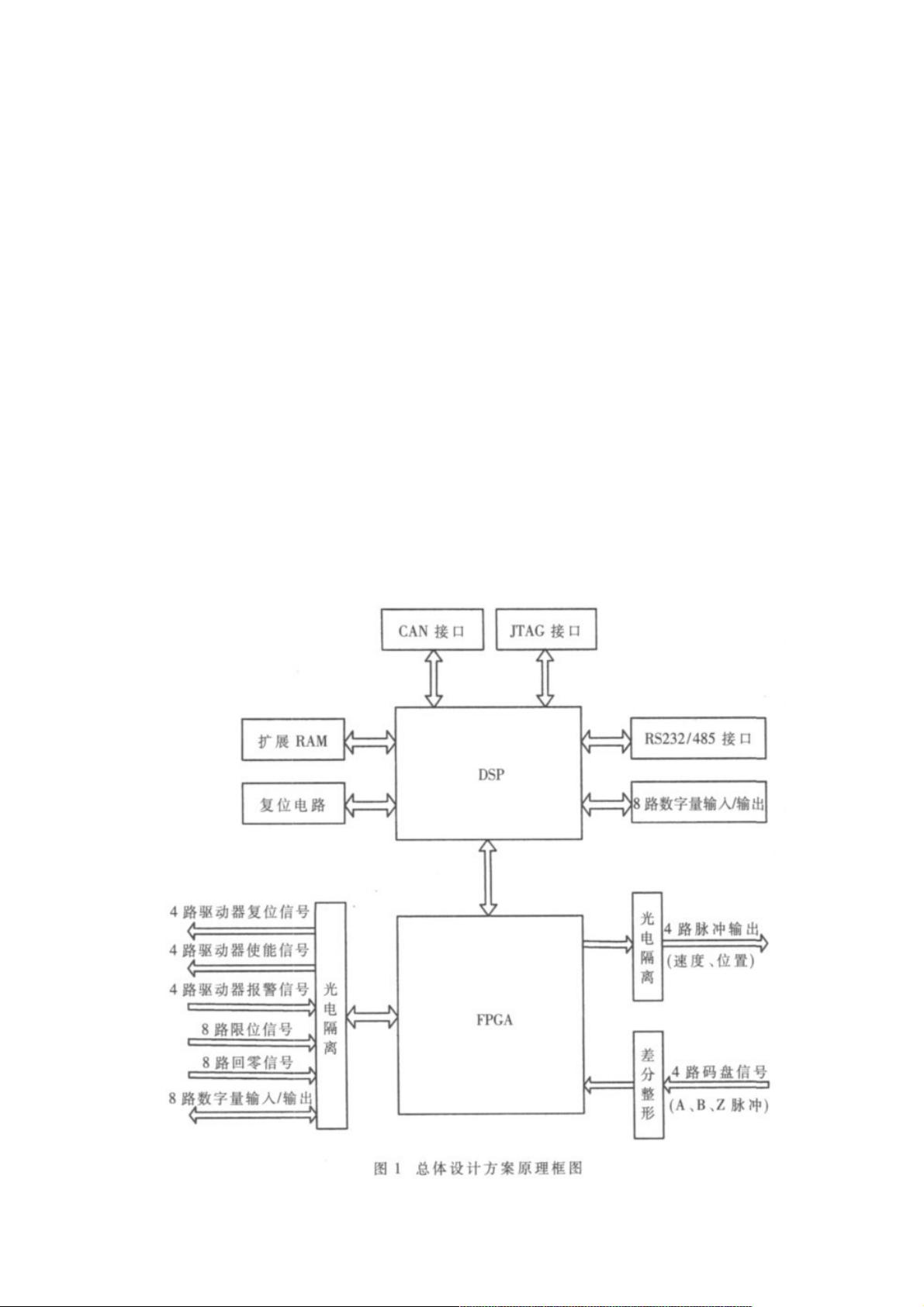
运动控制器的总体性能指标为:作为一个单独的运动控制器使用,控制信号采用数字量方式输出,能控制四轴的伺服电
机;脉冲输出频率为4MP/s,能处理的编码器反馈信号频率为4MP/s;能接收和处理4路编码器反馈信号;可以处理原点信
号、正负方向信号、到位信号以及急停信号等数字量输入信号;提供16路数字量输出信号和16路数字量输入信号接口。运动
控制器采用DSP与FPGA芯片作为主控芯片,主要包括DSP模块、FPGA模块、FPGA外围电路模块和数字量输入输出接口模
块。
采用基于DSP与FPGA的运动控制器,能够实时完成复杂的轨迹运算,而且利用DSP的高速数字信号处理功能和FPGA功
耗低、主频高的优点,能充分显示该运动控制器的优点。采用DSP与FPGA相结合的运动控制器可以方便地对系统的控制策略
进行修改,对控制参数进行修正,并可使设备具有良好的可靠性、可维修性,而且还降低了成本。系统还可以采用更多的智能
控制策略,结构灵活,有较强的通用性,适合于模块化设计,能够提高算法效率,且易于维护和扩展。总体设计方案原理框图
如图1所示。
2 系统硬件设计系统硬件设计
2.1 DSP模块模块
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38747144
- 粉丝: 4
- 资源: 938
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


