移动机器人编程工具箱MRPT指导教程
MRPT指导教程
MRPT(Mobile Robot Programming Toolkit)是一款移动机器人编程工具箱,旨在提供一个统一的编程接口,以便开发者更方便地构建移动机器人应用程序。下面是MRPT指导教程的知识点总结:
一、MRPT简介
MRPT是一个开源的移动机器人编程工具箱,旨在提供一个统一的编程接口,以便开发者更方便地构建移动机器人应用程序。MRPT提供了一系列的库和工具,以帮助开发者快速构建移动机器人应用程序。
二、MRPT版本
MRPT的当前版本为V1.0.2,用户可以通过MRPT官网(www.mrpt.org)下载最新版本的MRPT。
三、编译MRPT
MRPT支持多种操作系统,包括Windows、GNU/Linux、Ubuntu/Debian、Fedora、OpenSUSE和Mac。用户可以根据自己的操作系统选择合适的编译方法。
四、CMake build选项
MRPT使用CMake作为构建系统,用户可以使用cmake-gui或控制台命令来构建MRPT。CMake提供了多种build选项,以满足不同的开发需求。
五、生成Makefiles/IDE工程
MRPT提供了多种生成Makefiles/IDE工程的方法,以便用户可以根据自己的需求选择合适的方法。
六、编译MRPT
MRPT提供了多种编译方法,包括使用MinGW、clang等编译器。用户可以根据自己的需求选择合适的编译方法。
七、第一个C++/MRPT程序
MRPT提供了一个简单的C++/MRPT程序示例,用户可以根据这个示例程序来学习MRPT的使用方法。
八、MRPT库简介
MRPT提供了多种库,以便开发者可以根据自己的需求选择合适的库。用户可以创建自己的库,也可以使用已有的库。
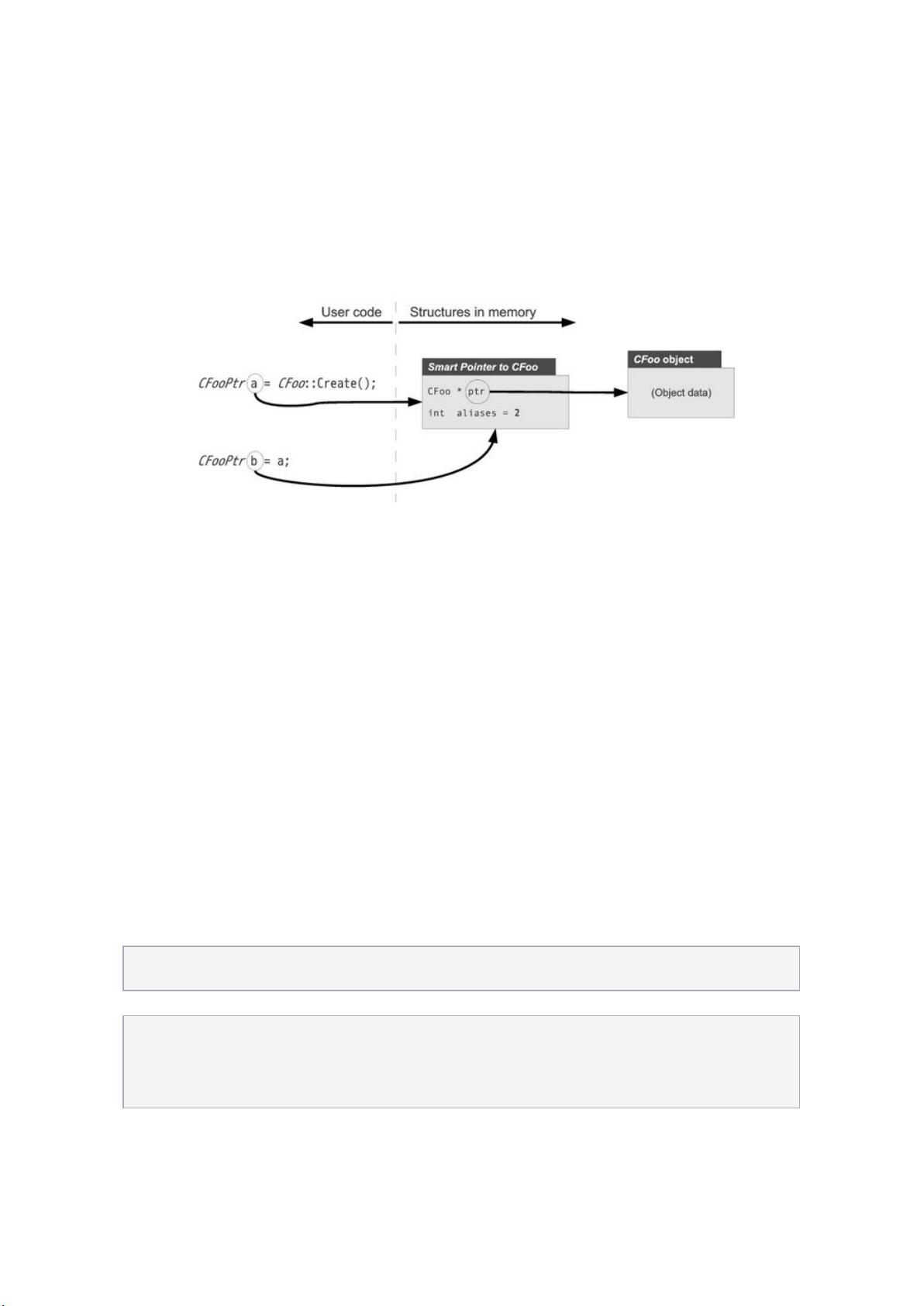
九、智能指针
MRPT使用智能指针来管理内存,用户可以使用智能指针来简化自己的代码。
十、常见问题和错误
MRPT提供了常见问题和错误解决方案,以便用户可以快速解决问题。
十一、在Linux中用Makefile和pkg-config编译定制应用
MRPT提供了在Linux中用Makefile和pkg-config编译定制应用的方法,以便用户可以根据自己的需求选择合适的编译方法。
十二、在ROS节点中使用MRPT
MRPT提供了在ROS节点中使用MRPT的方法,以便用户可以将MRPT与ROS集成。
十三、与PCL交互使用MRPT
MRPT提供了与PCL交互使用MRPT的方法,以便用户可以将MRPT与PCL集成。
MRPT指导教程提供了MRPT的详细使用方法和知识点总结,旨在帮助开发者快速掌握MRPT的使用方法。
16
test.cpp
)
TARGET_LINK_LIBRARIES(mrpt_example1 ${MRPT_LIBS})
# Set optimized building:
IF(CMAKE_COMPILER_IS_GNUCXX AND NOT CMAKE_BUILD_TYPE MATCHES "Debug")
SET(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -O3 -mtune=native")
ENDIF(CMAKE_COMPILER_IS_GNUCXX AND NOT CMAKE_BUILD_TYPE MATCHES "Debug")
如果你不能确定添加哪个库到 “FIND_PACKAGE( MRPT REQUIRED …)” 命令中,可
以阅读相关教程。
使用下面命令调用 CMake:
ccmake .
在 Linux/Mac 系统,或:
cmake-gui .
在 Linux/Windows 系统,需要用户提供 MRPTConfig.cmake 文件路径(在创建 MRPT
库的过程中已经生成),有时候 CMake 会自动找到 MRPT 目录不需要用户提供路径。
在 Windows 中,(对于旧版 CMake) 如果 CMake 不能自动找到 wxWidgets 路径。你也
必须设定变量 wxWidgets_ROOT_DIR 为 wxWidgets 根目录路径。
在 Linux 中,如果 MRPT 已经安装在系统中(比如/usr 或/usr/local 或),cmake 会自动
找到 MRPT 配置文件,不要额外操作。
1.2-3 接下来?
你可以尝试编译这些示例。
1.3 简介 MRPT 库
MRPT 包含一系列 C++库以及很多 ready-to-use 应用。这部分介绍对于移动机器人开发
者最感兴趣的部分: 库。
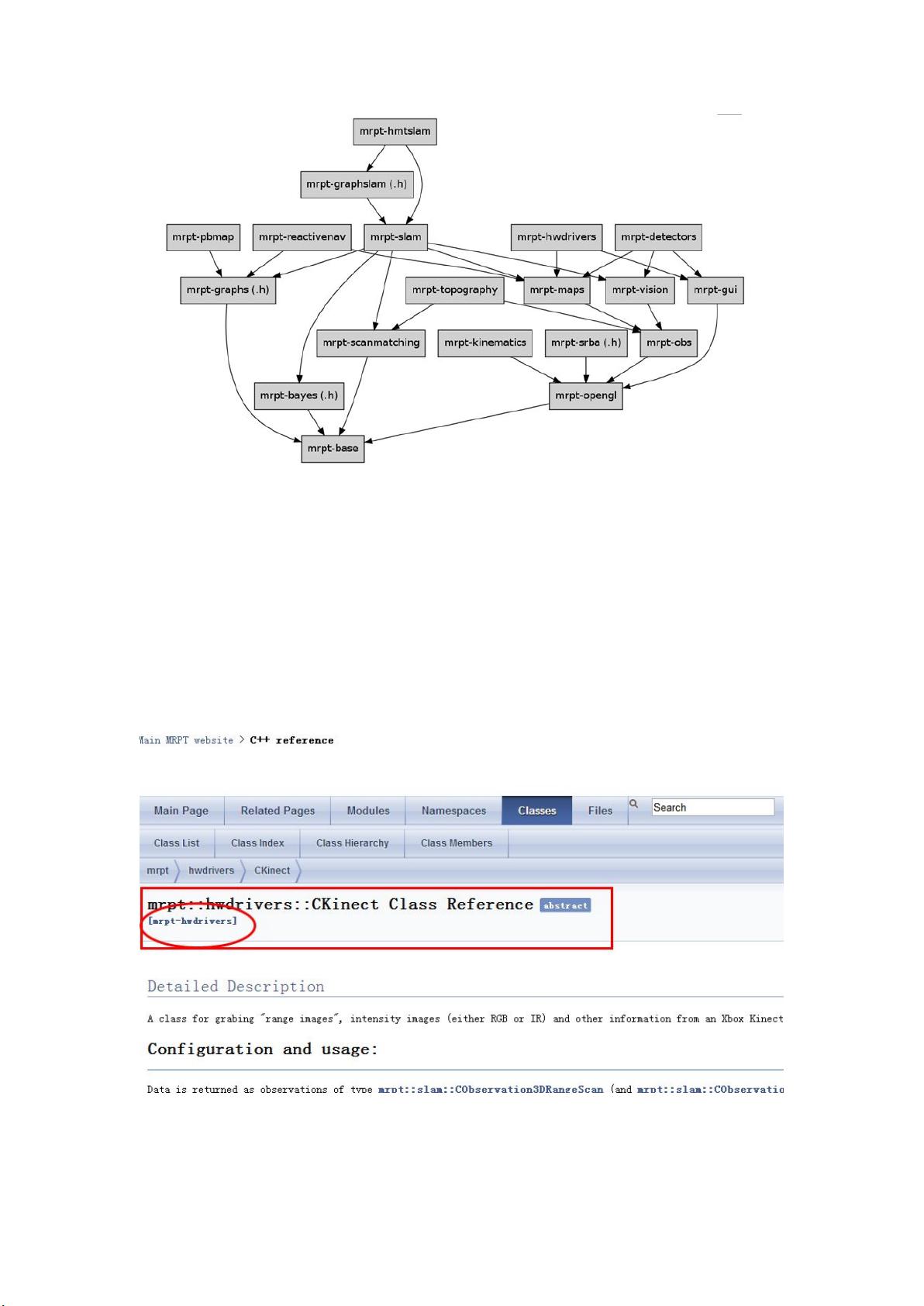
1.3-1 已有库
MRPT 中有大量的 C++模板和类,将它们分割成一系列的库和模块是个好主意,用户可
以仅选择依赖的部分库,减少编译时间和以后的依赖问题。
下图是 MRPT 中已有库的依赖图谱。箭头 "A -> B" 意味着 "A 依赖于 B"。
点击任意库可以进入该库的 Doxygen 文档页面,有该库的简介。
这些库还被进一步分割成一个或多个模块:查看所有模块清单。
剩余113页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
128 浏览量
点击了解资源详情
点击了解资源详情
188 浏览量
216 浏览量
点击了解资源详情

suluoyuqing
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 橙色渐变商务科技PPT模板IT产品展示下载
- Camino API:法国数字地籍API的开源实现
- OpenShift Java投资者存储库项目解析
- 浩辰CAD V2019二次开发SDK支持与技术支持指南
- 服务器运维全套客户端源码资源下载
- 深入探讨Vue.js项目开发实践
- 新天龙八部电脑主题 xp版安装指南与体验分享
- 新年祝福主题的金玉满堂PPT模板下载
- myPortfolio项目开发与配置指南
- Unitizer:Java BigDecimal单位转换的简便方法
- R语言项目:压缩包子文件操作详解
- 利用JupyterNotebook进行高效日常学习
- 绿色植物背景PPT模板下载-叶子上的露珠
- Java开发必备:解析dom4j-2.0.2的使用与下载
- STM32F103在EMWin中实现中文显示的方法
- wang-cli:打造高效的个人JavaScript开发环境
