CANoe入门:7.6版本CAN与LIN网络配置教程
版权申诉
4 浏览量
更新于2024-07-07
收藏 3.83MB DOCX 举报
本文档深入介绍了Vector公司的专业CANoe工程案例,以CANoe 7.6版本为例,讲解如何进行基础应用。首先,CANoe软件的安装过程简单明了,包括驱动程序的安装、硬件设备的连接,如CANcaseXL,该设备支持高速CAN(251)、LIN(7269)以及低速CAN(1054)等多种通信协议,可通过VectorHardware在控制面板中进行配置。
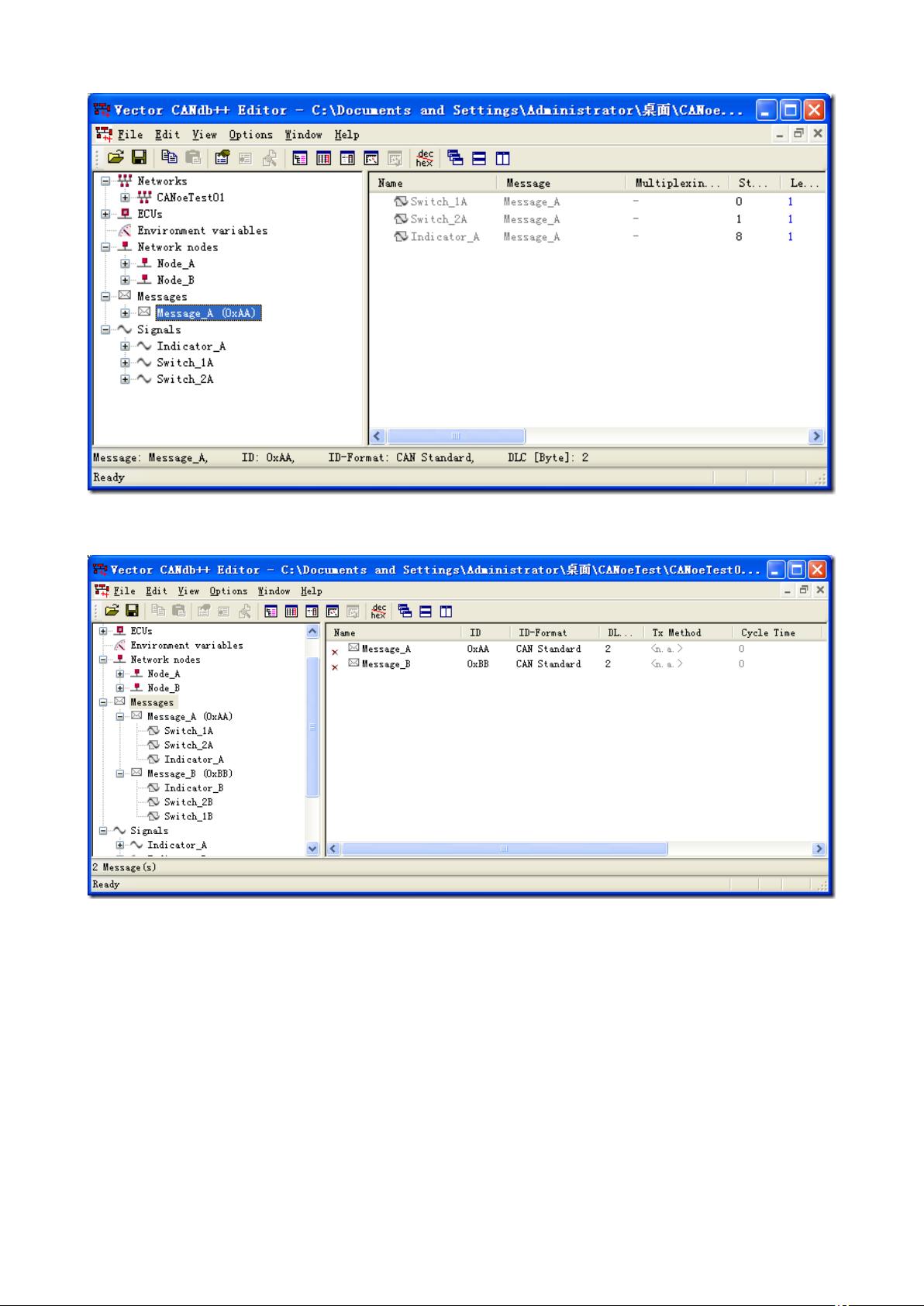
接着,用户会创建一个新的工程模板,如CAN_500kBaud.tcn,设定波特率为500Kbps,并学会保存配置。在此过程中,CANdb++Editor工具被用于定义总线网络、节点、消息和信号。通过右键菜单,依次创建网络节点(如Node_A和Node_B),指定节点属性,并定义CAN消息,如名称、ID和DLC等信息。
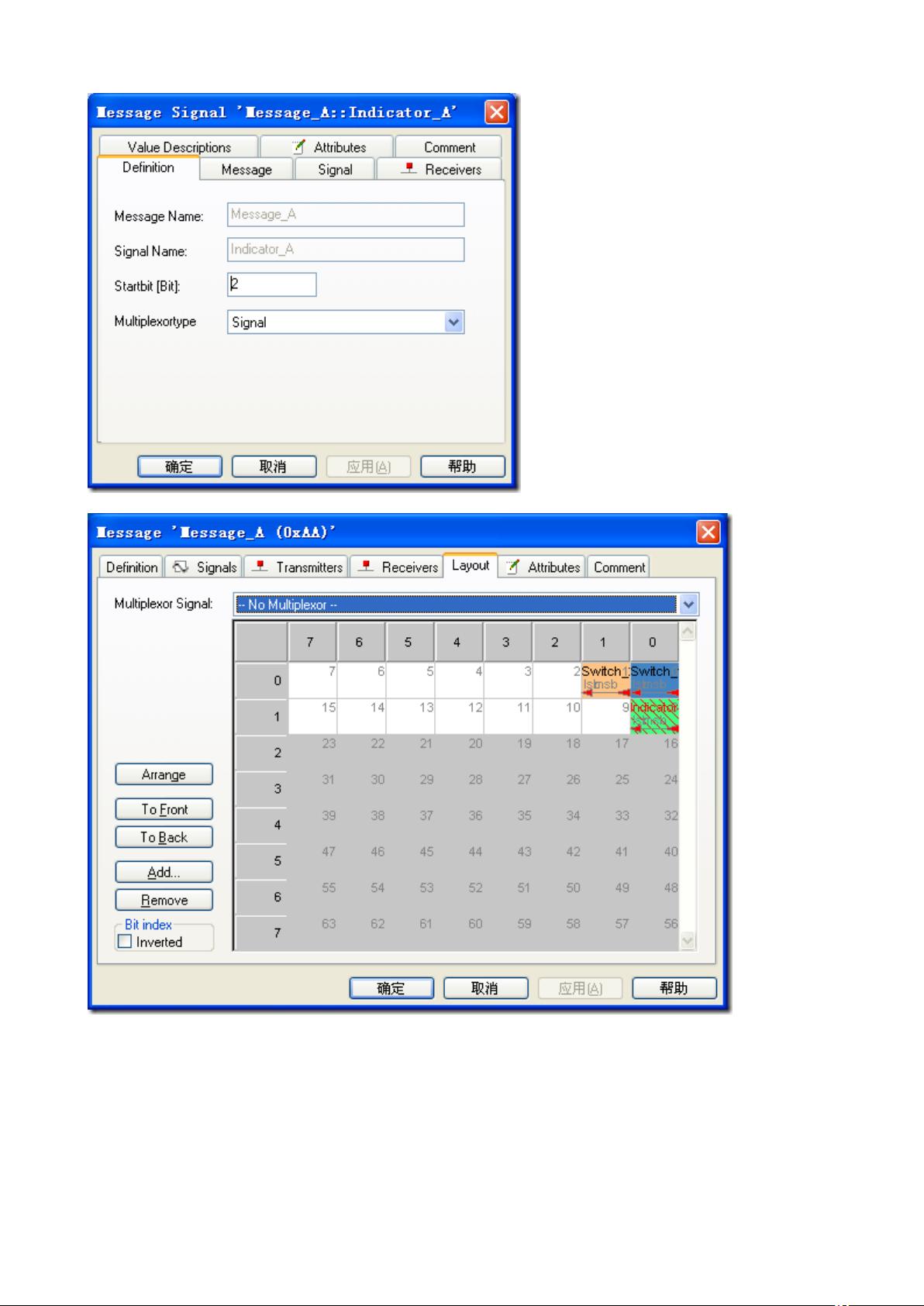
发送节点的定义有两种方式:一种是在Transmitters页面直接指定发送节点;另一种是暂时不清除发送节点,通过拖曳功能将消息与发送节点关联。信号的创建同样重要,右键点击"Signals"->"New",输入信号的名称、类型和其他属性。在创建信号后,将其关联到相应的CAN消息,可以选择Intel模式或Motorola格式来表示信号的数据编码。
本文档详细展示了如何利用CANoe进行CAN网络的设计和配置,涉及到了软件安装、硬件连接、工程模板的使用、数据库的创建以及关键数据结构的定义,对于初学者和经验丰富的工程师来说,都是一个极具价值的参考案例。
剩余35页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-30 上传
153 浏览量
225 浏览量
2021-09-14 上传
2019-06-11 上传
2023-03-26 上传

leessv
- 粉丝: 0
- 资源: 5万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 创建个性化的Discord聊天机器人教程
- RequireJS实现单页应用延迟加载模块示例教程
- 基于Java+Applet的聊天系统毕业设计项目
- 从HTML到JSX的转换实战教程
- 轻量级滚动到顶部按钮插件-无广告体验
- 探索皇帝多云的天空:MMP 100网站深度解析
- 掌握JavaScript构造函数与原型链的实战应用
- 用香草JS和测试优先方法开发的剪刀石头布游戏
- SensorTagTool: 实现TI SensorTags数据获取的OS X命令行工具
- Vue模块构建与安装教程
- JavaWeb图片浏览小程序毕业设计教程
- 解决 Browserify require与browserify-shim冲突的方法
- Ventuno外卖下载器扩展程序使用体验
- IIT孟买医院模拟申请webapp功能介绍
- 掌握Create React App: 开发Tic-Tac-Toe游戏
- 实现顺序编程与异步操作的wait.for在HarmonyOS2及JavaScript中
