CAN总线驱动的步进电机多机控制系统详解:精度与速度控制
20 浏览量
更新于2024-09-02
收藏 312KB PDF 举报
本文档主要探讨了基于CAN总线的步进电机多机控制系统的设计,CAN总线作为一种工业级现场总线,因其通信距离远、传输速度快的特性,使得该系统能够实现对多个步进电机的高效数字控制。系统的核心是通过一台PC机作为命令发送主机,利用USB-CAN接口模块与CAN总线连接,每个节点由单片机控制,具备CAN数据收发功能,负责步进电机驱动器和电机的控制。
系统的关键组成部分包括USB-CAN接口模块和CAN节点接收模块。USB-CAN接口模块采用51单片机、CH372、SJA1000以及82C250等组件,其中CH372负责数据的转换和传输,单片机则通过SJA1000将数据发送到CAN总线上。单片机与外设之间通过片选信号实现了互不影响的读写操作,以确保数据传输的准确性。
CAN控制器部分,选择了PICA82C250作为CAN控制器和物理总线的接口,它提供了差分发送和接收功能,能有效处理CANH和CANL线上的信号,并将处理后的信号传递给控制单元。为了增强系统的抗干扰性能,还采用了高速光电隔离器6N137保护芯片。
CAN节点模块的接口设计与USB-CAN模块类似,确保了节点间的一致性和兼容性。在整个系统中,CAN总线节点之间通过120欧姆的匹配电阻连接,这有助于提高通信的稳定性和抗噪声能力,从而实现对步进电机速度、正反转以及精确位置控制。
总结来说,本文详细介绍了基于CAN总线的步进电机多机控制系统的设计,从系统架构、硬件设计到通信协议的细节,突出了CAN总线在远程、高速通信中的优势,以及如何通过硬件设计确保系统的可靠性和精度。这种设计对于工业自动化和精密机械控制领域具有实际应用价值。
基于基于CAN总线的步进电机多机控制系统的设计总线的步进电机多机控制系统的设计
can现场总线具有通信距离远、传输速度快的特点,该系统可实现对电机的全集成数字控制。基于步进电机行程
的可控性,本系统可实现对运动对象的精确位置控制。
1 引言引言
由于
2 系统总体设计方案系统总体设计方案
该系统可由一台pc机作为命令发送主机,通过bus-can接口转换模块接入can总线,各节点是有单片机控制的具有can总线
数据收发功能的模块,来控制步进电机驱动器及电机终端。在pc机的应用层根据事先规定的格式把数据由usb接口发送给基于
usb总线的通用设备接口芯片ch372的usb-can接口转换模块上的单片机,单片机处理之后,再把数据传送到连接着各个步进电
机驱动器的节点的can总线上,各个节点的控制模块根据接收到的数据信息进行处理,实现对步进电机的速度、正反转及行程
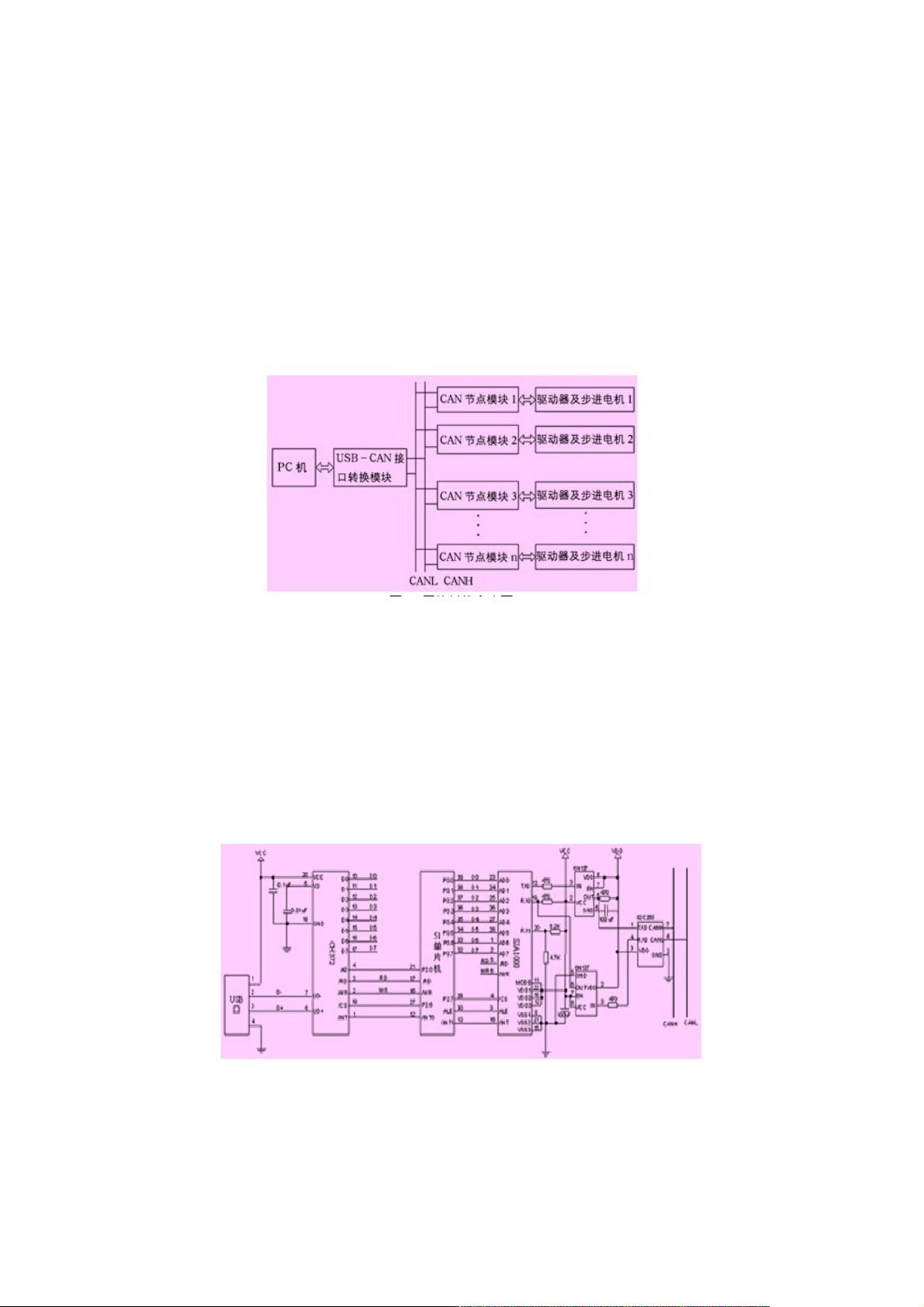
控制。图1为本设计的系统方案图。
图1 系统总体方案图
3 硬件设计方案硬件设计方案
系统的硬件包括usb-can接口模块和can节点接收模块电路的设计。
3.1 usb-can接口模块电路的设计
bus-can接口模块主要是由51单片机、ch372、sja1000及82c250组成,主机通过ch372把数据发送到单片机,单片机再把
数据通过sja1000发送到can总线上。图2中给出了从pc机的usb口到can总线的主要元件及其连接。图2及图3中的vdd、vcc均
为+5v直流电源,ch372有支持两种电源,+5v和+3.3v,本设计中使用的是+5v,可以直接从usb口获得,简化了电路设计。与
单片机连接的ch372和sja1000通过片选信号实现互不干涉的读写过程,完成各自的任务。
图2 usb-can接口转换模块原理图
can控制要实现其功能,必须具有外围扩展接口,构成完整的can通信系统,本设计选用pca82c250器件作为can控制器的
sja1000和物理总线间的接口,提供总线的差动发送和接收能力,处理来自canh和canh线的信号,并将处理后的信号传至控制
单元的can接收区。为了保护芯片并提高抗干扰能力,在控制器sja1000和82c250之间加入高速光电隔离器6n137。can总线网
络两端要接120欧姆的匹配电阻,可大大的提高通信的抗干扰性和可靠性。
3.2 can节点模块电路的设计
下载后可阅读完整内容,剩余3页未读,立即下载
711 浏览量
121 浏览量
475 浏览量
2023-06-20 上传
475 浏览量
337 浏览量









