差动驱动移动机器人动力学与运动学建模与控制
需积分: 9 181 浏览量
更新于2024-08-29
收藏 765KB PDF 举报
"Farhan A. Salem的学术论文‘Dynamic and Kinematic Models and Control for Differential Drive Mobile Robots’探讨了差速驱动移动机器人的动态和运动学模型以及控制方法,包括Simulink模型的示例。"
在移动机器人领域,差速驱动的两轮机器人因其结构简单、应用广泛而受到青睐。这种机器人由一个底盘和两个相互平行、固定的电动马达组成。本文主要提出了新的差速驱动移动机器人的动态和运动学模型,并就设计、建模和控制方案提供了一些考虑因素。
动态模型是理解机器人行为的基础,它考虑了机器人的质量和惯性、电机扭矩、摩擦力等因素。在差速驱动的移动机器人中,动态模型通常会涉及到牛顿第二定律,用于描述机器人在x和y轴上的加速度与作用力之间的关系。此外,电动马达的特性,如扭矩-速度曲线,也需要纳入模型中。通过这些模型,可以预测机器人在不同输入信号下的运动状态。
运动学模型则关注机器人的位置、速度和角度等几何特性,通常采用笛卡尔坐标系或极坐标系来表示。对于差速驱动机器人,最常用的运动学模型是基于轮速的Kinematic Chassis Model。这个模型假设机器人底盘是一个刚体,通过计算左右轮的速度差来确定机器人的转向角和线性速度。
论文中提到的Simulink模型是一种可视化建模工具,常用于系统级仿真。在Simulink中,可以构建动态和运动学模型的块图,然后进行仿真以验证模型的正确性和预测机器人的运动行为。通过这种方式,可以在早期发现系统层面的问题,并确保设计满足所有要求。
控制方案方面,可能涉及PID控制器、滑模控制、模糊逻辑控制等策略,以实现精确的定位、路径跟踪或避障等功能。PID控制器是最常见的选择,因为它简单且易于调整。然而,对于更复杂的任务,可能需要更高级的控制算法来处理不确定性、非线性和时变环境。
这篇论文提供了差速驱动移动机器人建模和控制的深入见解,对于机器人系统的设计和优化具有重要价值。通过理解和应用这些模型,工程师能够更好地设计和控制移动机器人,解决实际应用中的挑战。
Farhan A. Salem International Journal of Current Engineering and Technology, Vol.3, No.2 (June 2013)
255
Where: T the disturbance torque, all torques including
coulomb friction, substituting and solving gives equation
(6) written in the 7
th
page of this paper:
2.3 Controller selection and design.
Different resources introduce different methodologies and
approaches for mobile robot modeling and controller
design, for instant; in (Bashir M. Y. Nouri ,2005),
introduced and tested Modeling and control of mobile
robot using deadbeat response, by (J. R. Asensio et al,
2002) different control strategies are used and tested for
Modeling and controller design of basic used DC motor
speed control. Since we are most interested in dynamics,
modeling and simulation, we will apply only PID
controller, this control block can be replaced with any
other controller type. PID controllers are ones of most
used to achieve the desired time-domain behavior of many
different types of dynamic plants. The sign of the
controller’s output, will determine the direction in which
the motor will turn. The PID gains (K
P
, K
I,
K
D
) are to be
tuned experimentally to obtain the desired overall desired
response. The PID controller transfer function is given by:
2
2
/
I D P I P I
PID P D D
DD
K K s K s K K K
G K K K s s s
s s K K
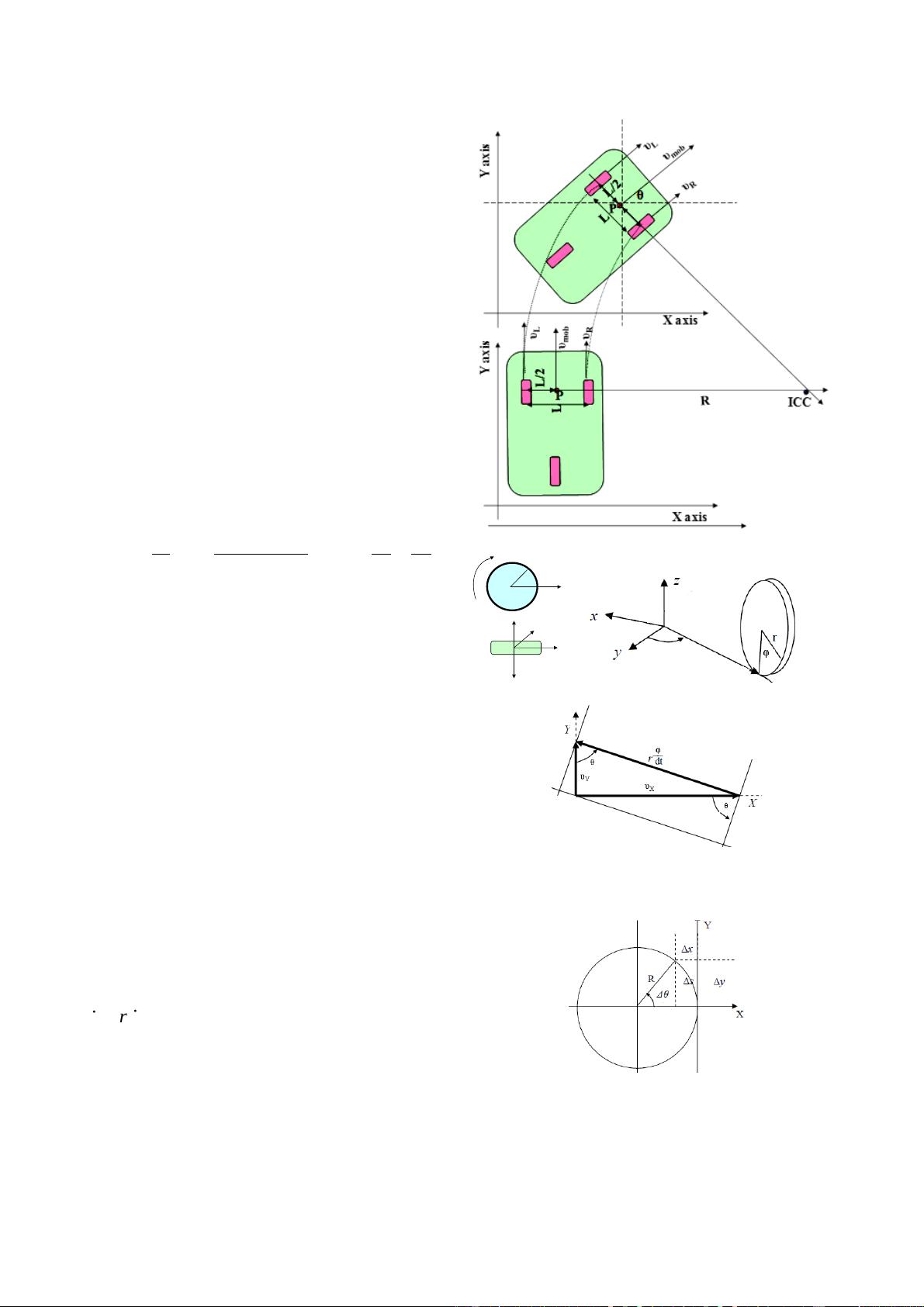
2.4 Differential drive Kinematics and dynamics modeling
To characterize the current localization of the mobile robot
in its operational space of evolution a 2D plane (x,y), we
must define first its position and its orientation. Assuming
the angular orientation (direction) of a wheel is defined by
angle θ, between the instant linear velocity of the mobile
robot v and the local vertical axis as shown in Figure
2(a). The linear instant velocity of the mobile robot v , is a
result of the linear velocities of the left driven wheel v
L
and respectively the right driven wheel v
R
. These two
drive velocities v
L
and v
R
are permanently two parallel
vectors and, in the same time, they are permanently
perpendicular on the common mechanical axis of these
two driven wheels.
When a wheel movement is restricted to a 2D plane
(x,y), and the wheel is free to rotate about its axis (x axis),
the robot exhibits preferential rolling motion in one
direction (y axis) and a certain amount of lateral slip (
Figure 2(a)(b)) , the wheel movement ( speed) is the
product of wheel's radius and angular speed and is directly
proportional by the angular velocity of the wheel, and
given by:
x r r
Where: φ: wheel angular position. Referring to Figure
2(c) ,while the wheel is following a path and having no
slippery conditions, the velocity of the wheel at a given
time, has two velocity components with respect to
coordinate axes X and Y.
sin cos
0 cos sin
xy
xy
r
Fig.2(a) The differential drive motion
(b) Wheel (c)
(d)
Fig. 2(a)(b)(c) Wheel movement kinematics
Fig. 3 circumference movement of mobile robot (Jaroslav
Hanzel, 2011)
Assuming the mobile robot follows a circular trajectory
shown in Figure 3, and Δs , Δθ and R are the arc distance
traveled by the wheel, and its respective orientation with
Y axis
X axis
Motion
φ
r
下载后可阅读完整内容,剩余10页未读,立即下载
142 浏览量
175 浏览量
2019-08-15 上传
170 浏览量
2023-09-22 上传
2024-03-30 上传

寒墨阁
- 粉丝: 5333
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建企业用工风险防控体系的关键策略
- IEEE 802.3ck标准C2M方向检测与决策树结果分析
- IEEE P802.3ba标准草案2.1评论分析
- 40GBASE-SR4 & 100GBASE-SR10 TP1/TP4接口标准提议
- 40GbE主机控制器经济性分析
- 电视互动屏幕革新:增强观众与品牌的联系
- Java与RFID技术结合的商品检测系统设计及实现
- 打造高效IP摄像机监控系统:核心技术与实现路径详解
- 股权激励促半导体设备行业整合,拓荆科技受益显著
- 2024年AI大模型在中国电信与云服务中的应用研究报告
- 组件业务建模:金融机构风险管理与合规成本新视角
- 第二代银联系统:全方位个性化营销解决方案
- 实验室动物福利:教育与培训项目开发指南
- CFA一级:投资组合管理及伦理专业标准详解
- Java牙科诊所管理系统:设计、实现与项目实例剖析
- QQ音乐平台音乐情感分析与用户情感共鸣关联性研究
