
基于基于C51单片机和单片机和TB6600步进电机驱动器驱动的三路超声波避障移动机器人平台设计与步进电机驱动器驱动的三路超声波避障移动机器人平台设计与
Proteus仿真仿真
目录目录前言例程分析模块介绍超声波模块(SRF04)TB6600步进电机驱动器和42步进电机原理图讲解运用示波器模拟代码部分项目后期
前言前言
这是我在一个大学生机械创新比赛所做的项目,主要学科是机械,本人也是一位机自专业的大三学生,对高端的电控知识并不是很了解,只是在学习之余自学了相关硬件和控制的知
识。因本人才疏学浅,故该文章只是记录我的此次设计过程,并将其分享出来,希望能够和与我有类似经验的同学讨论,或者受到专业人士的批评指正。
为了记录的这次比赛的具体设计思路,以供以后有参与相关比赛意愿的同学参考,我将会从最基本的各模块的使用开始说起,相信我,即使你只是了解过一点点和51单片机有关的知
识,懂得并行I/O口和定时器的相关使用,那么这边文章就不会难懂。如果连并行I/O口和定时器也不了解,那我还是建议你先学习这些知识。
例程分析例程分析
作为此次比赛的作品的某一个功能模块,我们的想实现的具体功能为:该移动平台和机器人的其他模块保持独立,该平台只具有移动的功能,底部两个橡胶轮通过差速实现平台转
弯,另外加一个万向轮用来保存平台的稳定,橡胶轮接有悬架,可以保证平台移动平稳,而在底盘的底部还有橡胶垫,当平台上受到的力达到某个阈值时,平台下降,橡胶垫接触地
面,保证在平台受力时不会乱晃。底盘三维模型如下图。
模块介绍模块介绍
该项目涉及到的模块有:超声波模块(SRF04)、TB6600步进电机驱动器和两相四线步进电机。如果能力允许,我将在后期更新红外遥控功能。这样,这个机器人底盘就可以实现
红外遥控功能和自主避障功能。
由于身边没有相关硬件设备,所以我目前的设计工作只是停留在软件仿真阶段,使用的是Proteus 8进行模拟的。下面介绍相关模块的使用
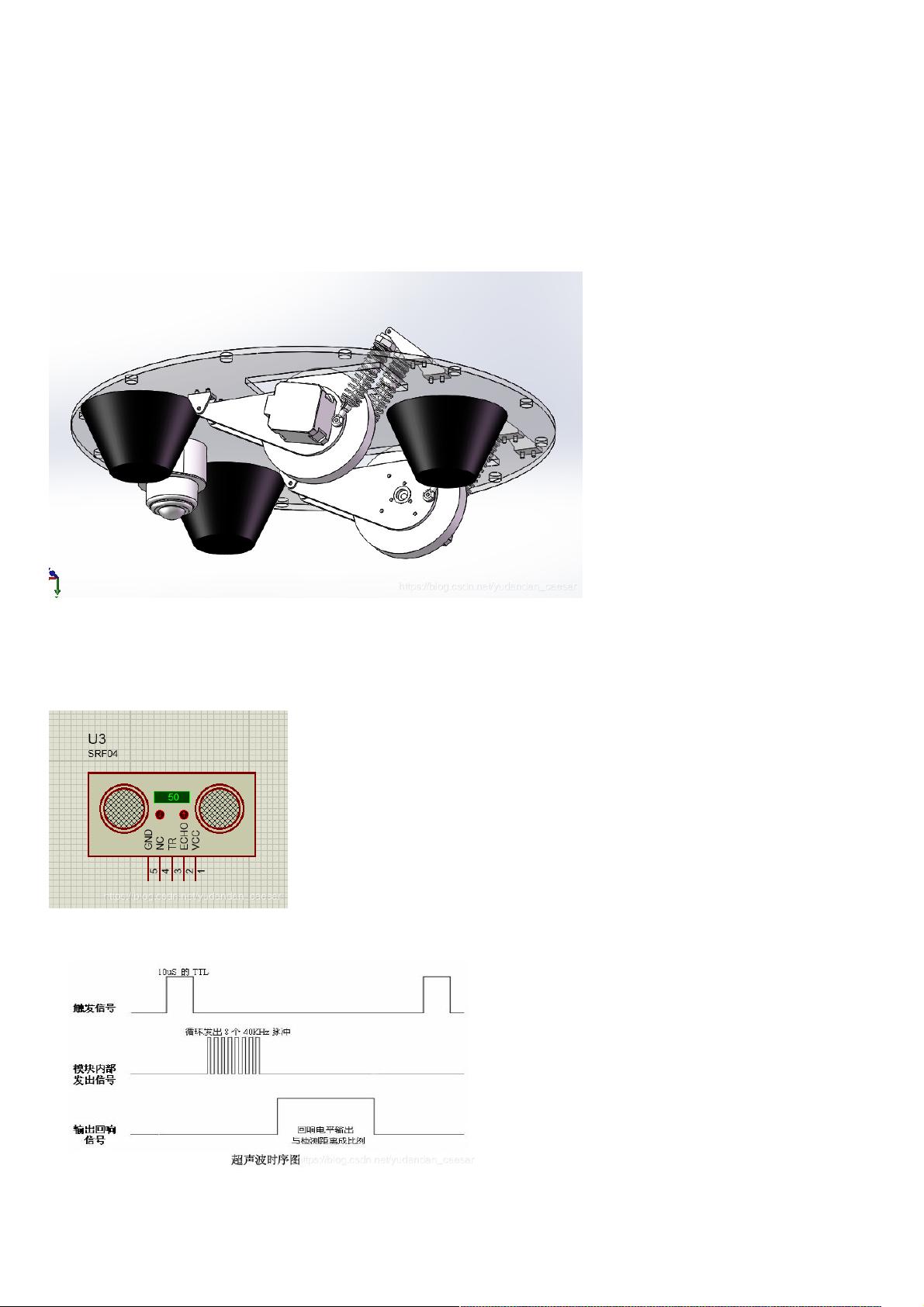
超声波模块(超声波模块(SRF04))
上图是Proteus 8 提供的超声波模块(关键字:SRF04),可以发现它有5个引脚,其中GND接地、VCC接高电平、NC(Not Connected)可不接,因此只剩下了两个引脚。TR用作
激发信号的输入,当超声波模块在TR引脚上检测到了连续的10us以上的高电平时,超声波模块才开始工作。“ECHO”用作反馈信号输出,当超声波检测到有障碍物时,从该引脚输出
相应信号。具体的信号时序如下图所示
值得注意的是,在超声波模块获得触发信号的时候,模块内部发出了8个40KHz的脉冲,如果只是要使用这个模块,则可以不理会其中的含意。从超声波模块发出超声波开始,输出
回回响信号置高电平,直到模块接收到信号为止,回响信号才变为低电平,由此,我们可以得到输出回响信号高电平持续的时间与障碍物之间的距离的关系:
X(t)=t×340/2
X(t) = t×340/2
X(t)=t×340/2
其中 t 的单位为秒,X的单位为米。340是常温下声音在空气中的传播速度。
下载后可阅读完整内容,剩余5页未读,立即下载

weixin_38499732
- 粉丝: 9
- 资源: 935
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


