"四元数与旋转矩阵推导与计算"
需积分: 0 41 浏览量
更新于2023-11-23
3
收藏 511KB PDF 举报
四元数(Quaternion)是一种数学工具,用于描述三维空间中的旋转操作。本文旨在通过详细推导过程,讨论四元数与旋转矩阵之间的关系。
首先,文章提到了复数(ComplexNumber)的性质和其与二维旋转的关系。因为四元数的性质与复数类似,所以理解复数的性质会对理解四元数有帮助。
接下来,文章强调了使用几何学和线性代数的基础知识来推导和理解四元数与三维旋转的关系,并表示这种方式并不复杂。因此,本文将侧重于几何学和计算机图形学中的应用。同时,文章提到对于对物理学或抽象代数感兴趣的读者,本文可能不太适用,但提供了一些拓展阅读的建议。
作者在文章中还提到了自己编写的计算演示代码,并提供了Github链接。同时,作者也提到了文章可能存在一些错误,并欢迎读者提供错误反馈和意见。
最后,文章声明了使用「CC BY-NC-SA 4.0」协议,要求在共享时署名并采用相同协议,同时不允许商业用途。
综上所述,本文详细推导了四元数与旋转矩阵之间的关系,并强调了使用几何学和线性代数的基础知识来理解。文章还提供了示例代码及拓展阅读建议,以及错误反馈渠道。

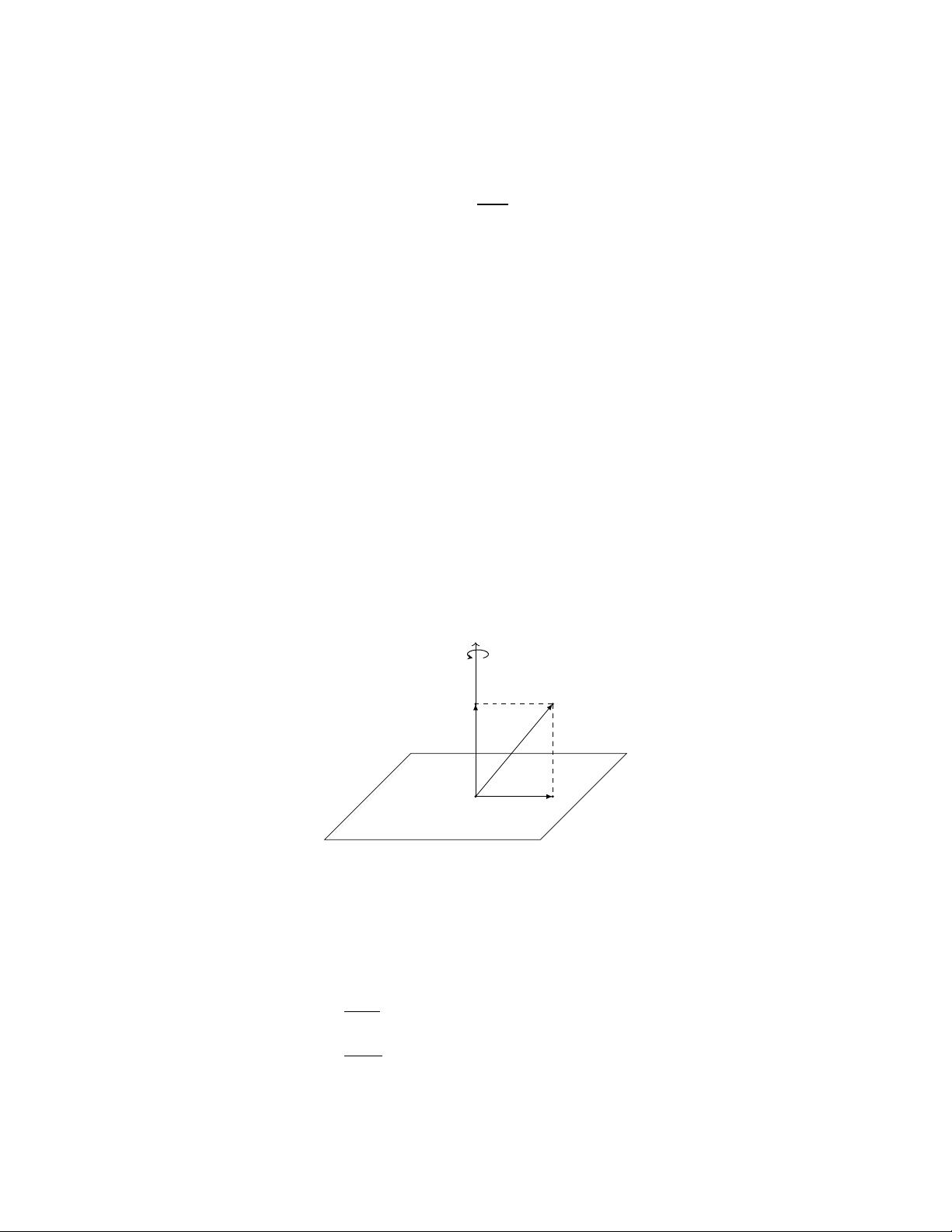
注意,在这篇教程中我们将使用右手坐标系统,并且我们将使用右手定则
来定义旋转的正方向.你可以将右手拇指指向旋转轴 u 的正方向,这时其它
四个手指弯曲的方向即为旋转的正方向.在上图中即为逆时针方向.对于左
手坐标系情况的讨论请见第 9 章.
在轴角的表示方法中,一个旋转的定义需要使用到四个变量:旋转轴 u 的
𝑥, 𝑦, 𝑧 坐标,以及一个旋转角 θ,也就是我们一共有四个自由度 (Degree of
Freedom).这很明显是多于欧拉角的三个自由度的.实际上,任何三维中的旋
转只需要三个自由度就可以定义了,为什么这里我们会多出一个自由度呢?
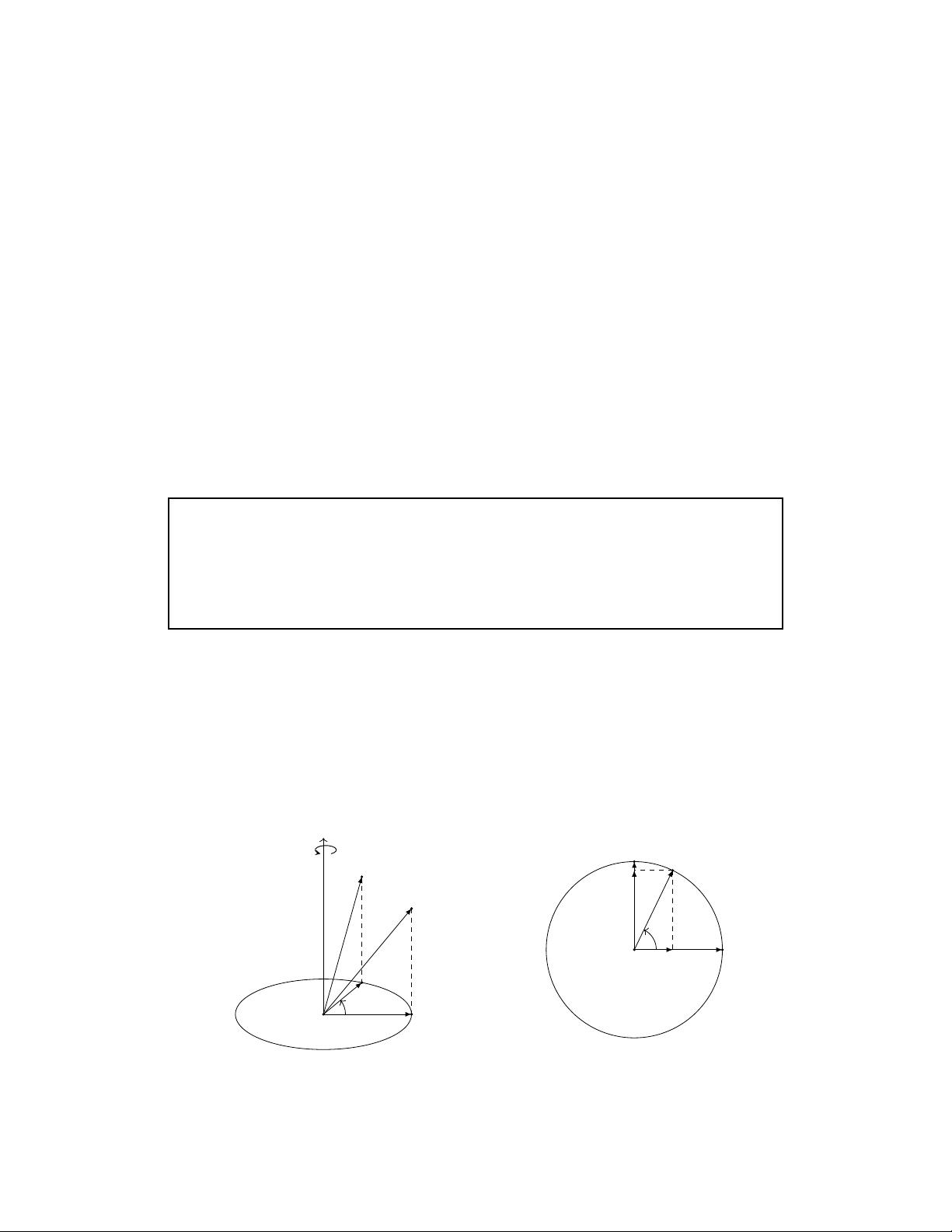
其实,在我们定义旋转轴 u 的 𝑥, 𝑦, 𝑧 坐标的同时,我们就定义了 u 的模
长(长度).然而,通常情况下,如果我们说绕着一个向量 u 旋转,我们其实
指的是绕着 u 所指的方向进行旋转.回忆一下向量的定义:向量是同时具有
大小和方向的量,但是在这里它的大小(长度)并不重要.我们可以说绕着
u
1
= (0, 0, 1)
𝑇
这个轴进行旋转,也可以说绕着 u
2
= (0, 0, 3)
𝑇
旋转.虽然这
两个向量完全不同,但是它们指向的都是同一个方向(即 𝑧 轴的方向):
𝑦
𝑧
𝑥
u
2
u
1
在三维空间中定义一个方向只需要用到两个量就可以了(与任意两个坐标
轴之间的夹角).最简单的例子就是地球的经纬度,我们仅仅使用经度和纬
度两个自由度就可以定义地球上任意一个方位.而如果我们要表示某一个方
位上的特定一个点,则还需要添加海拔这个自由度.
为了消除旋转轴 u 模长这个多余的自由度,我们可以规定旋转轴 u 的模长
为 ∥u∥ =
p
𝑥
2
+ 𝑦
2
+ 𝑧
2
= 1,也就是说 u 是一个单位向量.这样一来,空间
中任意一个方向上的单位向量就唯一代表了这个方向.我们其实可以将模长
规定为任意的常量,但是规定 ∥u∥ = 1 能为我们之后的推导带来很多的便利,
这也是数学和物理中对方向定义的惯例.
12
剩余72页未读,继续阅读
3175 浏览量
140 浏览量
551 浏览量
2948 浏览量
2025-01-07 上传
369 浏览量
144 浏览量


嘀嗒嗒~
- 粉丝: 67
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 可爱蝴蝶图标下载
- containment-unit:使用 Docker 支持 Postgres 测试
- CartPoleDesign
- doophp(php框架) v1.4.1
- CompSoc-Highlight:BICs 2020大奖的重点网站
- 小丑鱼图标下载
- 虚拟演示
- 初级java笔试题-learn-to-code:学习编码
- ModelMaker Code Explorer 15.0.13.2378 (Delphi 代码增强工具)
- 章鱼卡通图标下载
- putty-64位安装包.zip
- 智能家居行业小程序源码.zip
- CSC-2110-Project
- 22_Bit_CPU_MIPS
- XCSandboxViewer:App sandbox file manager of iOS device ! iOS真机沙盒文件管理器 !
- Công Cụ Đặt Hàng Của Đặt Hàng Siêu Tốc 247-crx插件
