
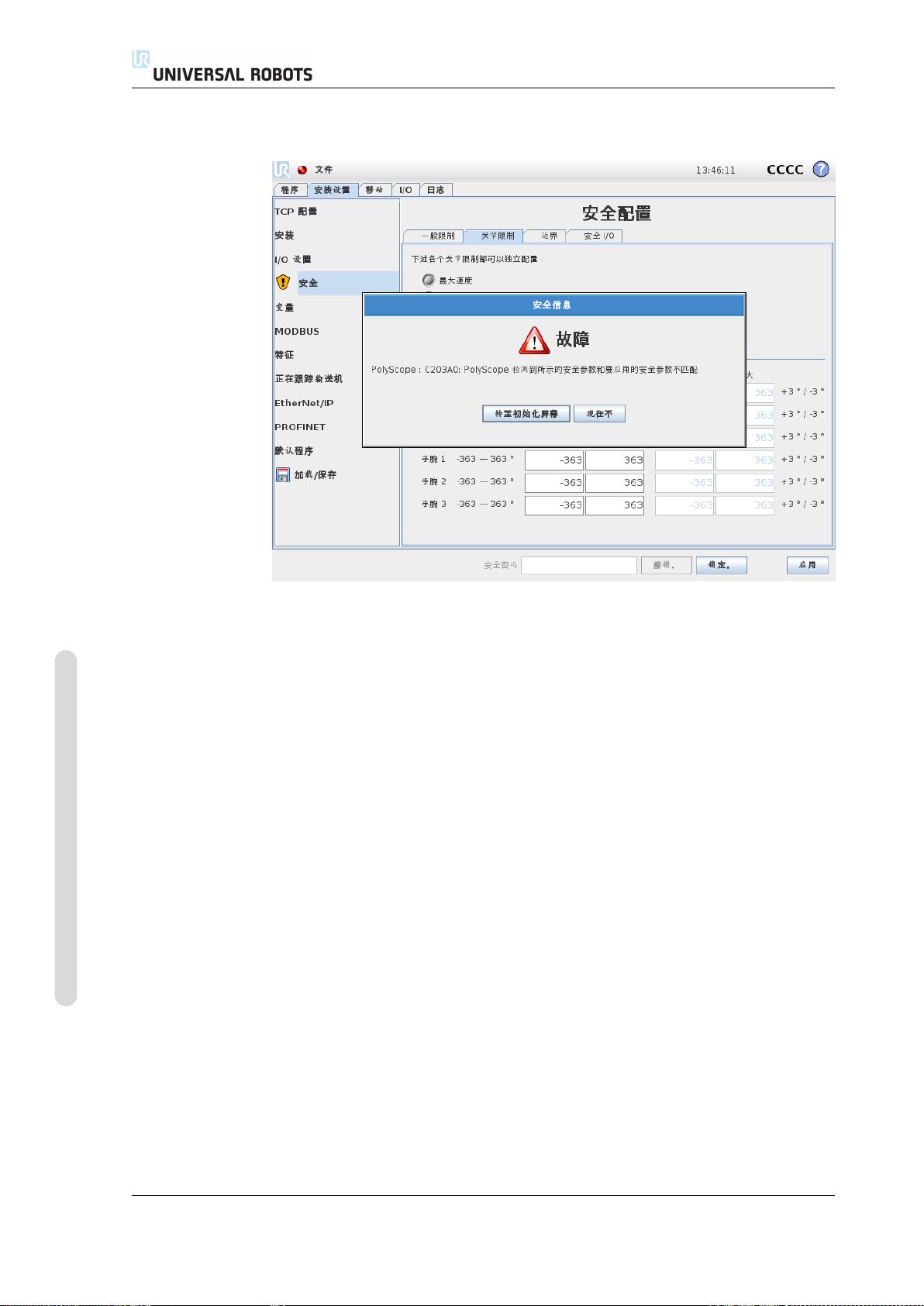
10.11 关节限值
10.11 关节限值
关节限制对每个关节在关节空间的运动进行限制,即关节限制指的不是笛卡尔空间,
而是关节内部(旋转)位置和旋转速度。次面板上部的无线电按钮实现了对最大速度
和位置范围的独立设置。
在自由驱动模式下(详见 13.1.5),且某一关节的当前位置或速度接近限制时,用户
会感觉到一股反抗力,该反抗力随着关节接近限制值而增大。关节速度约在速度限
制的 20
◦
/s 以内时或是关节位置约在位置限制的 8
◦
以内时。
最大速度 本选项定义了每个关节的最大角速度。方法是点击文本域,然后输入一
个新的值。最大可接受值列于最大一栏中。所有值都不得小于公差值。
注意如果安全板和可配置输入都没有设置触发缩减模式,则缩减模式中的限制字段
会被禁用(详见 10.12和10.13)。此外,缩减模式的限制值不得高于对应的正常模式
限制值。
每个限制的公差和单位列于对应的行末。在运行程序时,机器人手臂的速度将自动
调整,以避免超过所输入的值减去公差之值(参见 10.4)。请注意,公差值所示的负
号只是用于表明要从实际输入的值中减去公差。但是,如果某些关节的角速度超过
输入的值(无公差),安全系统将实施 0 类停机。
位置范围 本屏幕定义了每个关节的位置范围。方法是点击对应的文本域并输入新
的关节位置上下限。输入的区间必须在范围这一栏以内,且下限不得大于上限。
注意:如果安全板和可配置输入都没有设置触发缩减模式,则缩减模式中的限制字
段会被禁用(详见 10.12和10.13)。
每个限制的公差和单位列于对应的行末。第一个公差值应用于最小值,第二个公差
值应用于最大值。由于将第一个公差与输入的最小值相加,以及将第二个公差值与
CB3 II-10 版本 3.5.0
版权所有 © 2009–2017 Universal Robots A/S. 保留所有权利。
剩余106页未读,继续阅读

鲸阮
- 粉丝: 26
- 资源: 303
 我的内容管理
展开
我的内容管理
展开







最新资源
- JDK 17 Linux版本压缩包解压与安装指南
- C++/Qt飞行模拟器教员控制台系统源码发布
- TensorFlow深度学习实践:CNN在MNIST数据集上的应用
- 鸿蒙驱动HCIA资料整理-培训教材与开发者指南
- 凯撒Java版SaaS OA协同办公软件v2.0特性解析
- AutoCAD二次开发中文指南下载 - C#编程深入解析
- C语言冒泡排序算法实现详解
- Pointofix截屏:轻松实现高效截图体验
- Matlab实现SVM数据分类与预测教程
- 基于JSP+SQL的网站流量统计管理系统设计与实现
- C语言实现删除字符中重复项的方法与技巧
- e-sqlcipher.dll动态链接库的作用与应用
- 浙江工业大学自考网站开发与继续教育官网模板设计
- STM32 103C8T6 OLED 显示程序实现指南
- 高效压缩技术:删除重复字符压缩包
- JSP+SQL智能交通管理系统:违章处理与交通效率提升
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


