Delta并联机器人运动学分析及应用
"Delta并联机器人运动学分析"
Delta并联机器人是一种高效、高精度的并联机构,广泛应用于工业自动化领域,特别是在高速拾取和放置、食品包装、医疗器械等方面。这种机器人的设计特点使其在很多方面优于传统的串联机器人,如更大的刚度质量比、卓越的动态性能、更高的运动精度、紧凑的结构以及更长的使用寿命。
并联机器人的主要优点在于其独特的力学特性。由于采用并联闭环杆系,它们通常只承受拉伸或压缩载荷,这种设计使得机器人的承载能力增强,同时减少了运动部件的质量,从而能够实现更高的速度和加速度。此外,并联机构的误差不会像串联机构那样累积,反而可以通过结构设计来平均和抵消这些误差,从而提高运动精度。
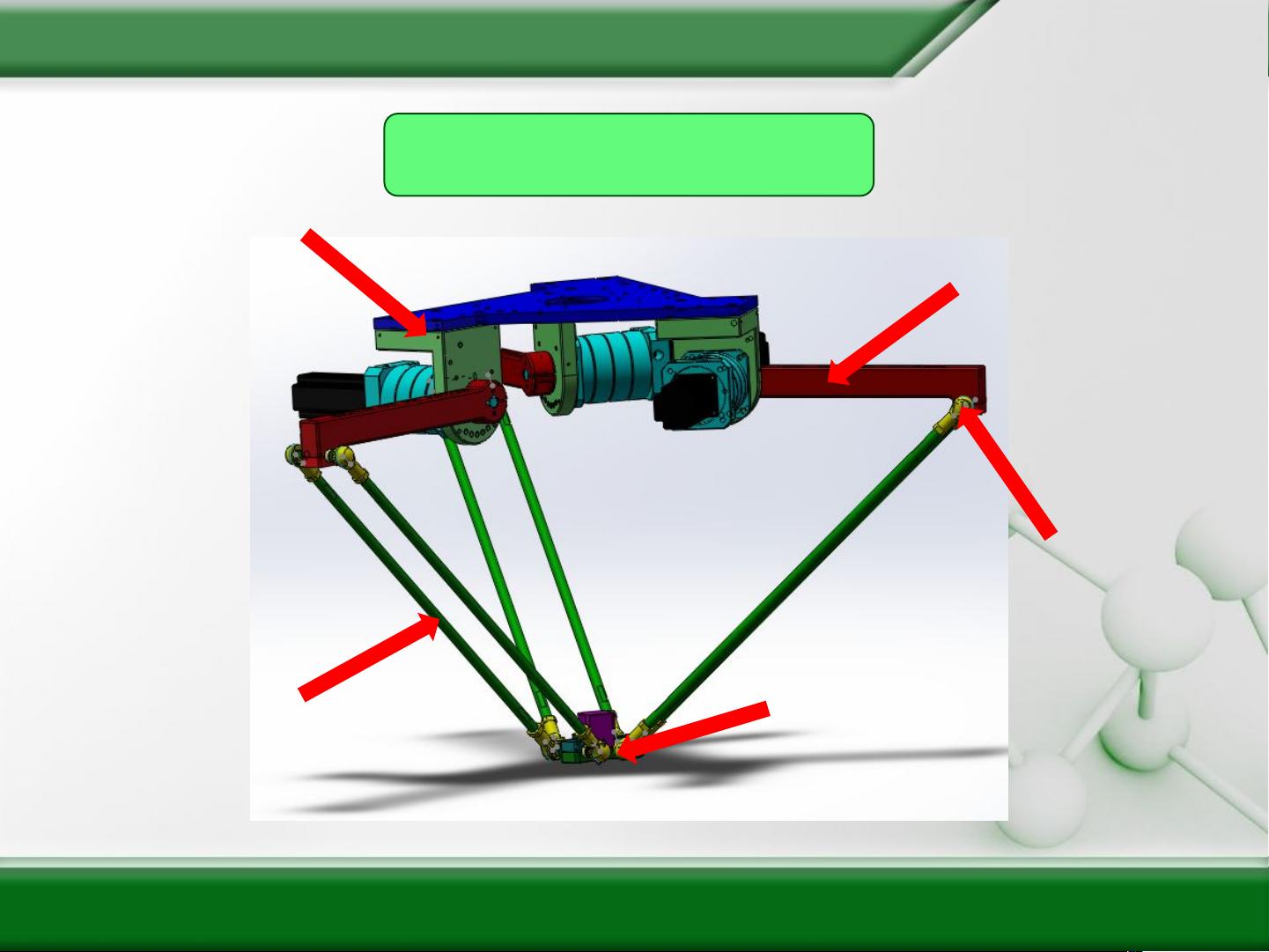
Delta并联机器人通常被归类为少自由度的并联机构,它们由动平台、静平台和三个或更多支链组成,能够在工作空间内实现平动。尽管这类机器人的工作空间相对较小,但它们能够灵活地执行复杂的运动轨迹,尤其适合需要多轴联动的精密加工任务。
在运动学分析中,Delta并联机器人的自由度计算是关键。一般来说,一个转动副提供一个自由度,而球头铰链则有两自由度。因此,通过空间机构学的理论,可以计算出整个机器人的自由度总数。运动学分析包括正解和逆解两个方面。运动学正解是从驱动输入的角度出发,确定机器人末端将到达的位置和姿态;而运动学逆解则是给定末端位置,反推出所需的驱动输入角度。
在实际应用中,Delta并联机器人可以执行各种复杂运动,如上下、左右、前后的平动。这通常涉及到空间变换理论,包括空间位置和姿态的坐标变换。通过对这些理论的理解和应用,可以深入分析并控制Delta并联机器人的运动行为,实现精确的定位和高效的作业。
Delta并联机器人以其特有的优势在许多行业中展现出了强大的潜力,而对其运动学的深入理解和分析则是优化其性能和控制的关键。通过不断的研发和改进,这种并联机器人有望在更多领域发挥重要作用,推动自动化技术的进步。

Delta 并联机器人简
介
食品领域 医学应用
剩余38页未读,继续阅读
303 浏览量
1954 浏览量
373 浏览量
108 浏览量
1400 浏览量
122 浏览量
2024-10-26 上传
279 浏览量

慕糖橙
- 粉丝: 12
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- PT100应用电路及相关设计资料
- 笔记本分析
- kanban:用于Redmine的看板插件
- 行业分类-设备装置-一种接插件端子组装检测系统.zip
- ComputerVision
- 浏览器 咨信浏览器 v9.0.52.4
- Arduino-NodeJs-Serialport
- OpenSchema:用于自然语言生成的文档结构模式-开源
- 砷:w-不要判断
- ProgrammingA1
- 摄影测量_单张像片的空间后方交会(C# windows form)
- 行业分类-设备装置-一种接入不同栅格地图服务的方法.zip
- NOVA:复杂组分析数据的分析和可视化。-开源
- ruby_rbenv:ruby_rbenv食谱的开发库
- Go-uuid:本项目为go语言生成uuid和通过雪花算法生成分布式唯一id
- github-clone.el:从 Emacs 分叉和克隆 Github 项目
