低成本自主无人地面飞行器:设计与应用探索
56 浏览量
更新于2024-06-18
收藏 2.43MB PDF 举报
本文档探讨了"低成本自主式无人地面飞行器的设计与实现"这一主题,发表在《未来计算与信息学杂志》(Future Computing and Informatics Journal)第三卷(2018年)304-320页,可通过ScienceDirect在线获取。该研究由Christopher Kwet Young Lam Loong Mana, Yogesh Koonjula, 和 Leckraj Nagowah等人合作,他们在毛里求斯大学的信息、通信和数字技术学院开展工作。
研究的核心目标是设计并构建一种经济高效的自主无人地面车辆(AUGV),旨在无需人工操作即可远程操控,同时具备自主导航能力。AUGV装备了Raspberry Pi 3作为中央处理单元,配以直流电机、伺服电机、超声波和红外传感器、网络摄像头、电池、移动电源、电机控制器以及智能手机等关键组件。通过Python、Java和PHP编程语言实现了原型,目前主要关注于室内的导航功能。
实际上,AUGV有广泛的应用潜力,比如作为一种自主轮椅,能帮助残疾人独立移动,无需依赖他人。这种技术的适用范围可以扩展至各种室内商业环境,如商场、酒店、银行、养老院、医院、办公室、商店和学校等,甚至博物馆,提高服务质量和便利性。
文章强调了机器人技术在协助人类生活中的重要作用,特别是那些需要在复杂环境中工作的机器人。然而,本研究的重点在于将自主性提升到一个新的水平,使机器人能在不受人为干预的情况下自行完成任务,从而推动了机器人领域的进步。
版权方面,本文基于Creative Commons Attribution-NonCommercial-NoDerivatives (CC BY-NC-ND) 许可证发布,由埃及未来大学计算机与信息技术学院授权爱思唯尔公司出版。该文章为开放获取资源,读者可以根据协议自由阅读和分享,但不能用于商业用途或修改其内容。
总结来说,这项研究不仅展示了低成本自主式无人地面飞行器的设计原理和技术实现,还突出了其潜在的社会应用价值和对未来智能设备发展的贡献。
C.K.Y. Lam Loong Man
等人
/Future Computing and Informatics Journal 3
(
2018
)
304e 320
307
●
而其它的例如布可能仅仅吸收声波,使得传感器没有办法
精确地检测它们。与红外传感器类似,超声波传感器在室
外使用时可能不是很准确,但在室内环境中可以表现得相
当好。
下面的表1给出了使用用于确定自主车辆的路径中的
6.
系统架构
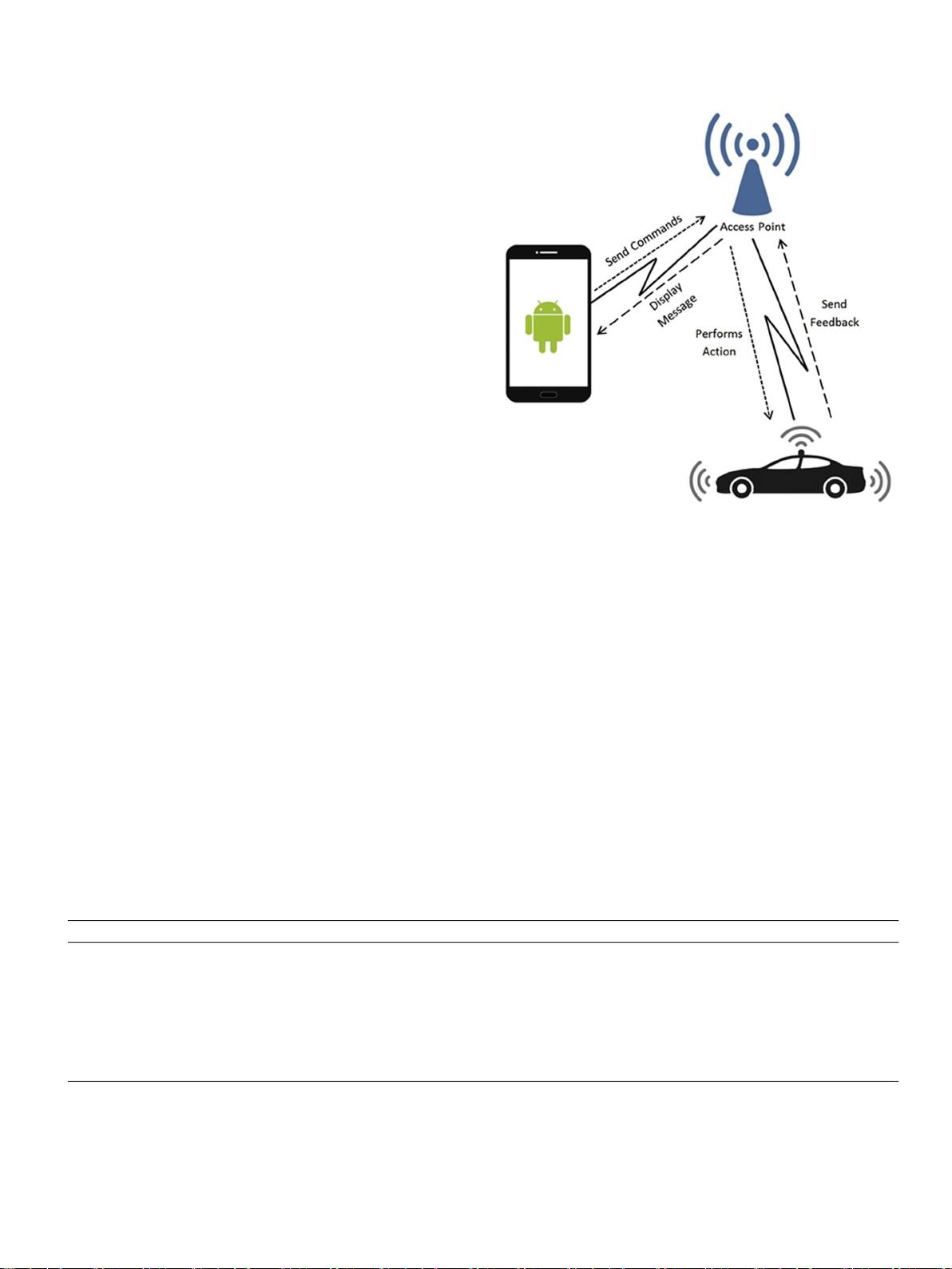
下面的图1显示了自主无人地面车辆(AUGV)应用程
序的高级设计。为了远程控制AUGV,智能手机和AUGV
车辆都应连接到接入点。从那里,移动应用程序能够通过
其IP地址访问车辆并向车辆发送操作。AUGV将在车内安
装一个树莓派,它将接收这些指令,执行必要的操作,并
发送反馈,这些反馈将在移动应用程序上接收和显示。
拟议的设计将允许AUGV在两种模式下运行:首先是远
程控制模式,其次是自主模式。在远程控制模式下,用户
将完全控制车辆,车辆将服从通过移动应用程序接收的指
令。在自主模式下,用户将使用移动应用程序选择AUGV
的来源和目的地。AUGV将自动计算到达最终目的地的最
短路径。它将使用传感器向目的地移动。使用摄像头,
AUGV应自动扫描QR码,以读取通往其最终目的地的方
向。如果QR码不在范围内,电机将旋转相机。根据QR
码,AUGV将决定是否继续前进,左转或右转。障碍物将
通过使用传感器来检测。当Objectives
检测到,AUGV将旋转180
度
,因此在相反的方向移动,直
到它到达另一个QR码,
帮助它计算另一条到达目的地的路径。
6.1.
AUGV
组件
图2显示了AUGV的内部电子组件。
Fig. 1. AUGV建筑设计
实施AUGV所需的组成部分如下:
●
直流电机:
将使用两个直流电机。他们是快速的-更多的电力供
应,他们将旋转得更快。应使用两个这样的电机,并结合
一个钢脚轮圆球,这将允许车辆保持平衡并向任何方向移
动。
●
H桥控制器(L298n):
需要在两个直流电机和Pi之间建立连接,以便后者可以
控制电机。L298n模块将允许此连接。该模块的功能是能
够反转电源的正负端子,从而使直流电机顺时针或逆时针
旋转。它可以支持多达 50 V电源。
表1
现有障碍物检测技术的优缺点
方法优点缺点
基于距离和外观的障碍物算法
●
计算速度非常快●可能会出现误报和漏报
Sobel边缘检测简单检测边缘及其方向
Canny边缘检测●改善信噪比
具有更好的噪声
●
对噪声
●
可能不准确
●
计算复杂且耗时的假过零时间
红外传感器
●
快速响应时间
●
精度受阳光
●
不受噪音影响●无法检测远处物体
超声波传感器●快速响应时间●可能无法检测所有物体
●
远距离检测物体●产生错误读数
剩余17页未读,继续阅读
2009-02-02 上传
2021-08-09 上传
2021-12-19 上传
2023-04-22 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
