LSTM神经网络驱动的移动前传XG-PON动态带宽预测算法
188 浏览量
更新于2024-08-29
收藏 998KB PDF 举报
本文主要探讨了一种基于长短期记忆(Long Short-Term Memory, LSTM)神经网络的动态带宽分配(Dynamic Bandwidth Allocation, DBA)方法在移动前传(Mobile Front-Haul, MFH)网络中的应用,特别是在10吉比特能力的无源光网络(Passive Optical Network, PON)环境中。传统的DBA方法往往受限于回程时间延迟,这对于满足MFH链接所需的严格低延迟需求是不足够的。作者Min Zhang、Bo Xu等人提出的新策略通过LSTM神经网络对到达光网络单元(Optical Network Unit, ONU)缓冲区的包数量进行预测,从而有效地消除了这一问题。
LSTM神经网络的优势在于其能够处理序列数据中的长期依赖关系,这使得它在预测流量模式和行为时比传统的前馈神经网络(Feed-Forward Neural Networks, FFNN)表现更优。这种方法的创新之处在于利用了LSTM的记忆单元来捕捉时间序列数据中的动态变化,这对于通信网络中的流量预测至关重要,因为它可以帮助网络更好地规划和管理带宽资源,避免突发流量导致的拥塞。
在实验部分,研究人员进行了广泛的模拟分析,结果显示基于LSTM的DBA方法在降低延迟、提高网络效率和稳定性方面表现出色。这项研究对于优化移动前传网络的带宽分配机制具有实际意义,特别是在追求高速度和低延迟的5G和未来移动通信网络中,能够为用户提供更流畅、更可靠的连接体验。
总结来说,这篇论文的核心知识点包括:LSTM神经网络在动态带宽分配中的应用、其在预测移动前传网络流量方面的优势、如何通过消除传统DBA的回程时间延迟来满足低延迟需求,以及与传统FFNN的性能比较。这一研究不仅推动了无线通信领域的技术进步,也为未来的网络设计提供了有价值的技术参考。
Traffic estimation based on long short-term memory
neural network for mobile front-haul with XG-PON
Min Zhang (张 敏)
1
,BoXu(许 渤)
1,
*, Xiaoyun Li (栗晓云)
2
, Yi Cai (蔡 怡)
1
,
Baojian Wu (武保剑)
1
, and Kun Qiu (邱 昆)
1
1
Key Laboratory of Optical Fiber Sensing and Communications, Ministry of Education, University of Electronic
Science and Technology of China, Chengdu 611731, China
2
Business School, University of International Business and Economics, Beijing 100029, China
*Corresponding author: xubo@uestc.edu.cn
Received January 28, 2019; accepted April 12, 2019; posted online June 25, 2019
A novel predictive dynamic bandwidth allocation (DBA) method based on the long short-term memory (LSTM)
neural network is proposed for a 10-gigabit-capable passive optical network in mobile front-haul (MFH) links. By
predicting the number of packets that arrive at the optical network unit buffer based on LSTM, the round-trip
time delay in traditional DBAs can be eliminated to meet the strict latency requirement for MFH links. Our
study shows that the LSTM neural network has better performance than feed-forward neural networks. Based on
extensive simulations, the proposed scheme is found to be able to achieve the latency requirement for MFH and
outperforms the traditional DBAs in terms of delay, jitter, and packet loss ratio.
OCIS codes: 060.4250, 060.4510.
doi: 10.3788/COL201917.070603.
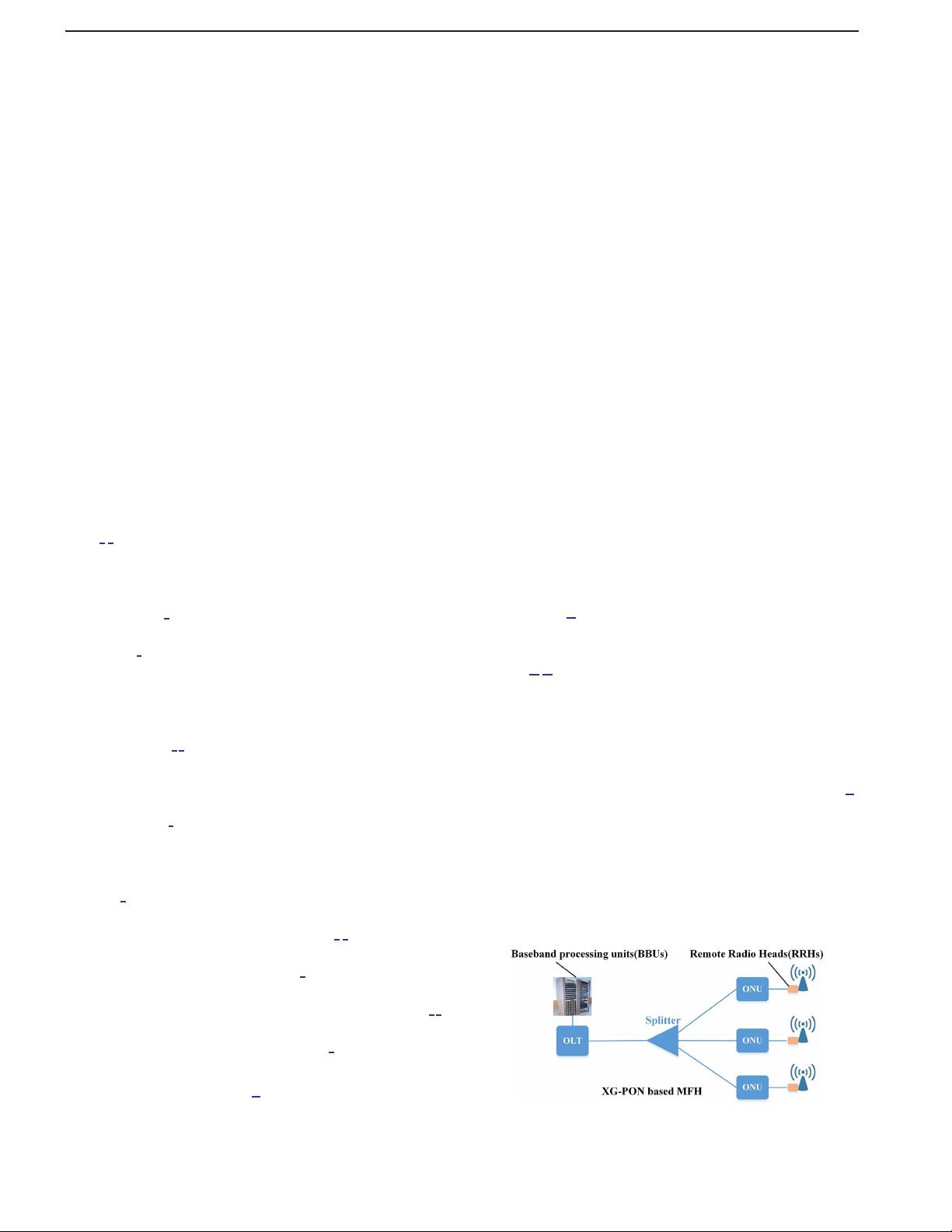
The cloud radio access network (C-RAN) is one of the key
technologies for fifth generation mobile communication
(5G)
[1–3]
. In a C-RAN, the digital baseband processing
units (BBUs) are moved from mobile base station sites
to a central location known as the BBU pool that serves
a group of distributed radio units known as remote radio
heads (RRHs)
[1]
. Mobile front-haul (MFH) is an optical
link that connects RRHs in multiple locations to the
BBU pool
[2]
. The number of MFH links is expected to
increase with the increasing traffic requirements of the
5G systems. To reduce the MFH link cost, a time division
multiplexed passive optical network (TDM-PON) is pro-
posed as it allows sharing of optical fibers and transmis-
sion equipment
[2,3]
. However, a TDM-PON suffers from
a large latency for forwarding uplink traffic because an
optical network unit (ONU) has a waiting time of several
milliseconds in a typical dynamic bandwidth allocation
(DBA) scheme
[3]
. This transmission waiting time in the
ONU is a critical problem since the latency requirement
for the MFH link is very strict, e.g., less than 250 μs
defined by the Third Generation Partnership Project
(3GPP)
[4]
.
Different methods have been proposed in the literature
to solve the latency issue of TDM-PON
[5–9]
. For example,
fixed bandwidth allocation (FBA) is used to meet the
latency requirement for MFH links
[3]
. However, the band-
width usage efficiency is low and the number of ONUs that
can be accommodated is limited by the FBA algorithm
[3,5]
.
Instead, a statistical DBA scheme has been proposed to
improve the bandwidth usage efficiency
[7]
. A disadvantage
of the statistical DBA is that it cannot deal with burst
of MFH traffic. Reference [
8] evaluated the performance
of group-assured GIANT (gGIANT) and round-robin
DBA (RR-DBA). Results show that neither RR-DBA
nor gGIANT satisfies the delay requirement for MFH,
and RR-DBA has a lower upstream delay than gGIANT.
Machine learning (ML), a branch of artificial intelli-
gence (AI), is regarded as one of the most promising
methodological approaches to performing different types
of network data analysis for automated network self-
configuration
[10]
. Recently, machine learning techniques
have been successfully applied in optical communication
and optical networks to improve the intelligence of such
systems
[10–12]
. With its powerful modeling capabilities,
artificial intelligence is also desirable to help solving the
latency issue of TDM-PON for MFH applications.
In this Letter, we propose a long short-term memory
(LSTM)-based predictive DBA method for a slow-latency
10-gigabit-capable passive optical network (XG-PON)
MFH for a C-RAN based on traffic estimation in Fig.
1.
First, the problem of predicting the number of packets
that arrive at the ONU is formulated as an ML function
approximation problem. Second, LSTM is investigated for
this problem and compared to a feed-forward neural net-
work (FNN). Results show that the LSTM neural network
has better prediction performance than FNN. Finally, the
Fig. 1. MFH architecture based on the XG-PON system.
COL 17 (7), 070603(2019) CHINESE OPTICS LETTERS July 2019
1671-7694/2019/070603(6) 070603-1 © 2019 Chinese Optics Letters
下载后可阅读完整内容,剩余5页未读,立即下载
117 浏览量
2022-07-13 上传
103 浏览量
2025-01-09 上传
142 浏览量
241 浏览量
210 浏览量
106 浏览量
111 浏览量

weixin_38612527
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- DeepFreeze密码移除工具6.x版本使用教程
- MQ2烟雾传感器无线报警器项目解析
- Android实现消息推送技术:WebSocket的运用解析
- 利用jQuery插件自定义制作酷似Flash的广告横幅通栏
- 自定义滚动时间选择器,轻松转换为Jar包
- Python环境下pyuvs-rt模块的使用与应用
- DLL文件导出函数查看器 - 查看DLL函数名称
- Laravel框架深度解析:开发者的创造力与学习资源
- 实现滚动屏幕背景固定,提升网页高端视觉效果
- 遗传算法解决0-1背包问题
- 必备nagios插件压缩包:实现监控的关键
- Asp.Net2.0 Data Tutorial全集深度解析
- Flutter文本分割插件flutter_break_iterator入门与实践
- GD Spi Flash存储器的详细技术手册
- 深入解析MyBatis PageHelper分页插件的使用与原理
- DELPHI实现斗地主游戏设计及半成品源码分析
