"Carsim Prescan Simulink联合仿真入门案例分析"
需积分: 3 117 浏览量
更新于2023-12-24
3
收藏 9.44MB DOCX 举报
Carsim Prescan Simulink联合仿真入门指的是通过整合Carsim、Prescan和Simulink软件,来实现对车辆动力学模型、行驶环境和控制算法的联合仿真。通过这种方式,可以更全面和准确地对车辆的性能进行评估和优化。
在这个案例中,我们运行了一个Prescan、Carsim和Simulink联合仿真的实例,并记录了学习的过程。软件版本方面,Carsim选择了2019.0,提供了车辆动力学模型;Prescan选择了8.5,提供了车辆行驶环境;而MATLAB选择了2020b,提供了算法来控制车辆。
首先,我们需要建立Carsim动力学模型。具体步骤包括:新建联合仿真数据库,配置车辆参数,并关联新建立的数据库;在配置好的数据库中新建一个空白的Simulink模型,并设置仿真频率;定义车辆动力学模型的输入信号和输出信号;最后,在Simulink中找到生成的Carsim车辆模型,将其添加到模型中。
接下来,我们将Prescan的车辆行驶环境整合到仿真中。首先,在Prescan中配置车辆行驶场景,并生成场景文件;然后,在Simulink中导入Prescan场景文件,并与Carsim模型进行关联;最后,在Simulink中设置仿真参数,运行联合仿真。
最后,我们需要实现控制算法。在MATLAB中编写车辆控制算法,并将其导入Simulink中,与Carsim模型和Prescan环境进行关联。通过这种方式,我们可以对车辆的控制算法进行验证和调整,以实现对车辆性能的优化。
综上所述,Carsim Prescan Simulink联合仿真入门是一个相对复杂的过程,涉及多个软件的整合和多个步骤的操作。然而,通过这种方式可以实现对车辆的全面评估和优化,对于汽车制造商和研发人员来说具有重要的意义。希望通过本次学习记录,可以为初学者提供一些指导和帮助,让他们更快速地掌握Carsim Prescan Simulink联合仿真技术。
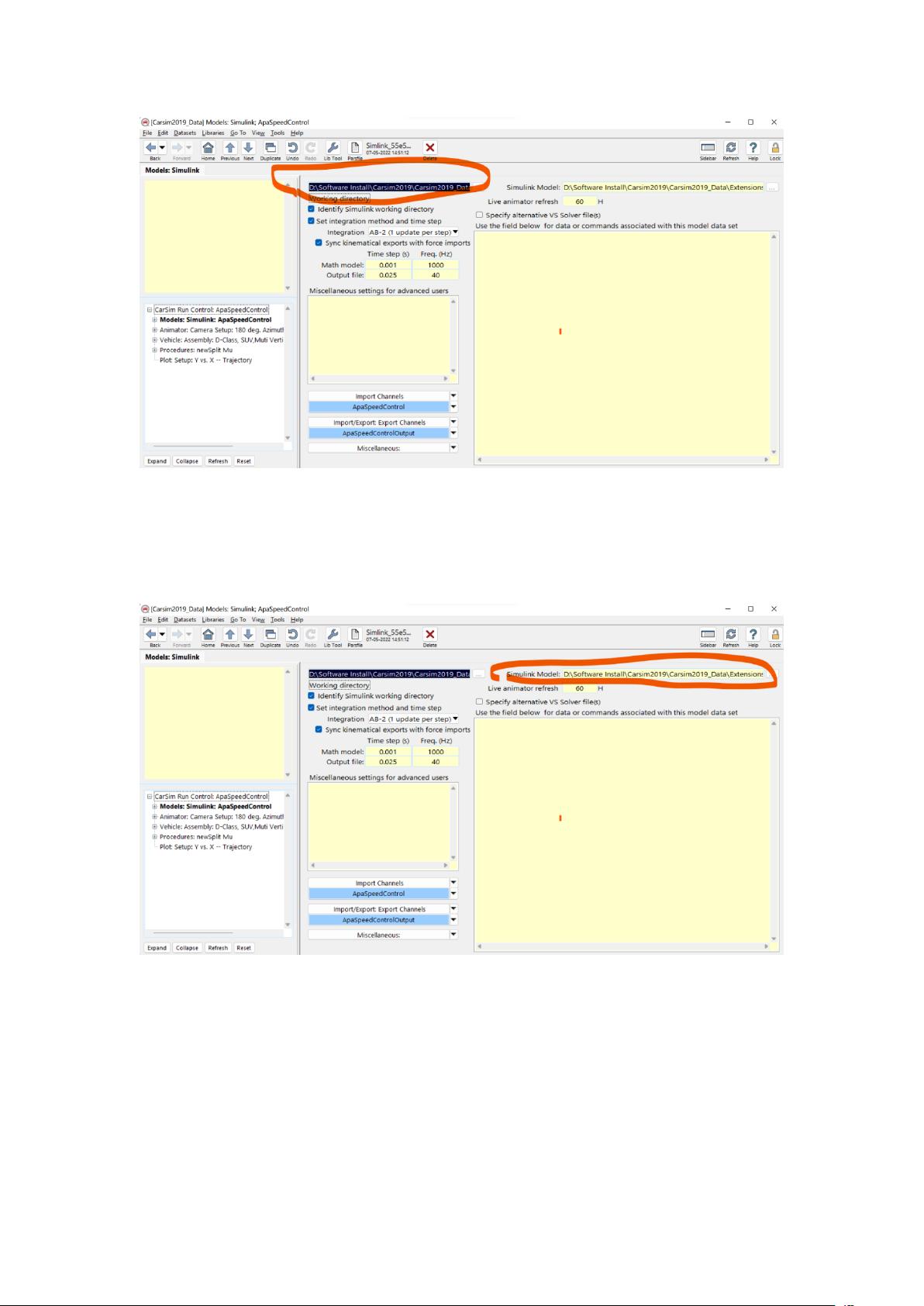
5.在步骤 4 中的文件下新建一个空白的 simulink 模型,然后在下图位置选择
新建的空白 simulink 模型,设置仿真频率 1000HZ。
6.定义车辆动力学模型的输入信号,点击下图
剩余14页未读,继续阅读
2192 浏览量
6465 浏览量
2332 浏览量
2332 浏览量
2192 浏览量
2024-11-04 上传
2024-11-03 上传
204 浏览量


临时演员9288
- 粉丝: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- Unicode编码详解与应用
- Rational ClearQuest 使用手册:缺陷追踪与管理指南
- IPTV关键技术与标准探索:编码、DRM、CDN与更多
- Jboss EJB3.0 实战教程:从入门到精通
- Windows API实现USB设备插拔检测
- Windows API 完整指南:函数详解与应用
- Spring开发指南(0.8版):开源文档详解与实战教程
- VisualC++入门教程:基于实例的学习
- 使用Struts2+Hibernate3+Spring2开发J2EE实战教程
- Windows XP Service Pack 3详解:更新与部署指南
- 提升英文网站流量的20种策略
- Oracle9i数据库管理基础入门
- 解决AJAX中文乱码问题
- ERP项目实施规划:目标、进度、资源配置的系统安排
- VC++串口通信实现与Windows API应用
- Head First EJB:轻松学习企业JavaBean
