EtherCat汇川AM402与BDHDE通信控制及运动控制功能块测试
需积分: 5 119 浏览量
更新于2024-08-03
收藏 2.27MB DOCX 举报
EtherCat汇川AM402与我司BDHDE通信控制
EtherCat汇川AM402与我司BDHDE通信控制是指使用EtherCat总线连接汇川AM402 PLC和BDHDE驱动器,以实现高效、可靠的运动控制。本文将详细介绍EtherCat汇川AM402与我司BDHDE通信控制的配置、编程和测试过程。
一、硬件组态
EtherCat汇川AM402 PLC和BDHDE驱动器是实现运动控制的核心设备。BDHDE驱动器是基于EtherCat总线的驱动器,可以与AM402 PLC实现高效、可靠的通信。
EtherCat汇川AM402 PLC的型号为AM402-CPU1608TP/TN,固件版本为3.5.11.11。BDHDE驱动器的型号为BDHDE-003APEB,固件版本为MCU_2.5.2BD22.08.02-FPGA_2.2.10。
二、软件配置
在EtherCat汇川AM402 PLC和BDHDE驱动器之间实现通信之前,需要对软件进行配置。首先,需要添加BDHDEDrive-2.2.2-20220310.xml文件到AM402 PLC中,然后添加BDHDE伺服轴和伺服轴电机参数配置。
在 etherCAT网络初始化配置中,需要根据应用需求,对总线循环周期、PDO、SDO等进行设定。
三、程序编写、编译、下载
EtherCat汇川AM402 PLC和BDHDE驱动器之间的通信需要通过程序来实现。首先,需要建立软件与PLC的通讯连接,然后生成POU,并将POU添加至“MainTask”。在POU中编写具体程序,编译程序,确认程序正确性,然后将程序下载到PLC中。
四、常用运动控制功能块测试
EtherCat汇川AM402 PLC和BDHDE驱动器之间的通信可以实现各种运动控制功能块的测试。例如,MC_Power功能块可以实现驱动器的上使能和停止。MC_Home功能块可以实现回零动作。
在MC_Home功能块测试中,我们选择了回零方式2,回零动作如下图所示:
在执行MC_Home功能块时,电机首先正向旋转,配合DI限位动作,实现模式2回零动作。但是,在SDO配置时,6098h(回零方式)值可以通过通讯更改,6099:16#01(回零速度)、609A:16#00(回零加速度)。
EtherCat汇川AM402与我司BDHDE通信控制是实现高效、可靠的运动控制的重要技术。通过对EtherCat汇川AM402 PLC和BDHDE驱动器的配置、编程和测试,可以实现复杂的运动控制功能块的测试。
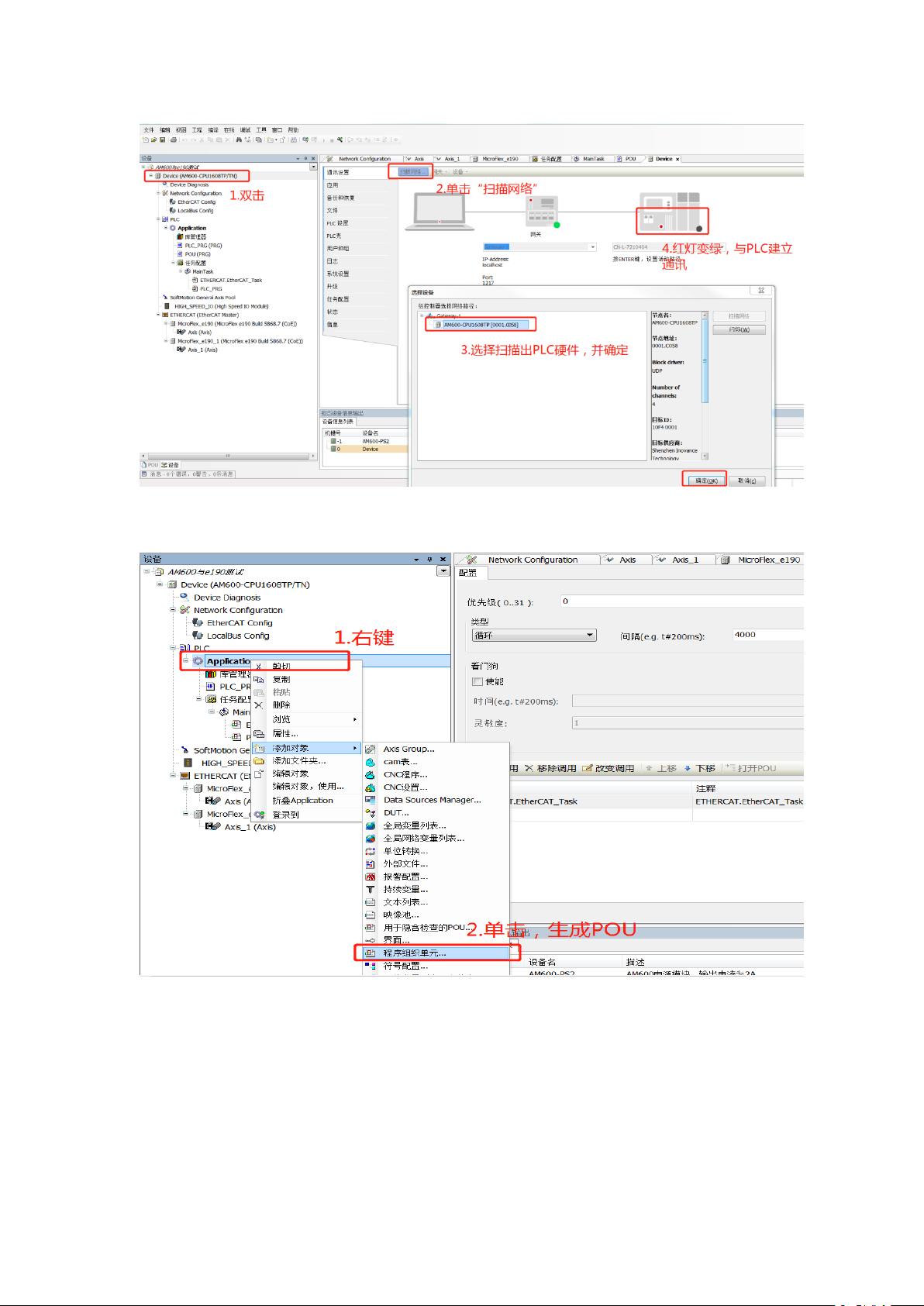
2、生成 POU
3、在 POU 中编写具体程序
剩余11页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-06-20 上传
2023-06-20 上传
2023-06-20 上传
2023-09-07 上传
2023-05-09 上传
2023-07-30 上传

「已注销」
- 粉丝: 1
- 资源: 20
 我的内容管理
展开
我的内容管理
展开







最新资源
- ASP网上花店设计与实现(论文+源代码).zip
- torch_scatter-2.0.7-cp36-cp36m-win_amd64whl.zip
- gohangout-output-cls
- ssl_opt:优化的matlab代码,用于在半监督学习中使用Laplace Beltrami算子特征函数来计算Laplacian特征向量
- 用于Flutter Widgets的JSON动态Widget Runtime。-JavaScript开发
- Clock by-Shantanu-crx插件
- PyPI 官网下载 | cdk-lambda-extensions-0.1.68.tar.gz
- TugasRestoranNetbean
- esp-walkie-talkie:用于基于ESP8266的对讲机无线电的软件(运行不正常)
- torch_sparse-0.6.11-cp36-cp36m-win_amd64whl.zip
- 802.11n_channel.rar_matlab例程_matlab_
- angular_todo:简单的待办事项清单示例,以熟悉Angular 2.0
- CassandraPerformanceMeasure:我几年前创建的原始开源项目的分支
- 拖动切换按钮Button效果
- Wr Playwright-使用Playwright进行智能,自动化和快速的跨浏览器测试!-JavaScript开发
- refactoringjsbook
