EtherCAT通讯:松下PLC与BDHDE驱动控制配置指南
需积分: 5 51 浏览量
更新于2024-08-03
收藏 1.1MB DOCX 举报
" EtherCat松下PLC与我司BDHDE通信控制,涉及高创驱动器的集成应用"
本文将详细解析如何实现EtherCAT通信协议在松下PLC与高创驱动器BDHDE之间的控制。EtherCAT(Ethernet for Control Automation Technology)是一种高效能的实时工业以太网技术,它在工业自动化领域中广泛应用,因其高速、低延迟和易于部署的特性而受到青睐。
一、硬件系统组件
硬件系统主要包含以下部分:
1. 控制系统与软件:采用FPWINGR7(V2280c)编程软件和ControlMotionIntegrator(V1040c)调试软件,配合松下PLC的CPU模块FP7CPS31E以及EtherCAT模块AFP7MC16EC。
2. 驱动部分:使用1套BDHD-0032AEB驱动器和PH2-M04B23035S30D电机。
3. 驱动软件:驱动固件版本为fw2.2.5BD21.4.29,同时需要配置XLM文件。
4. 其他配件:如外部电源,控制器通过USB线连接至电脑,EtherCAT接口与驱动器的C5接口相连。
二、调试流程
1. 组态主站和从站
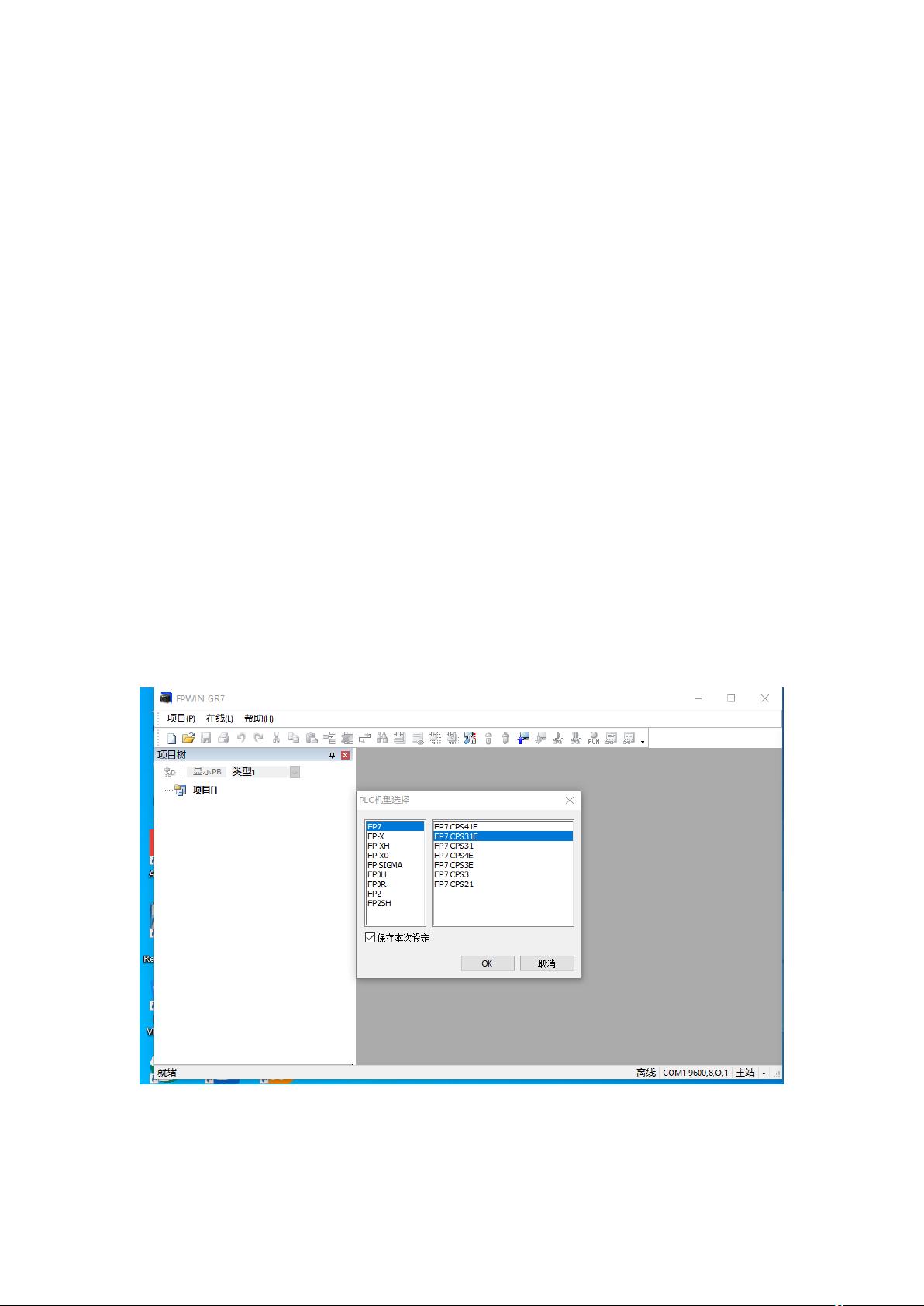
- 在FPWINGR7编程环境中新建工程,选择匹配的CPU型号FP7CPS31E。
- 在“选项”→“FP7配置”→“IO映射设置”中,配置CPU和EtherCat模块。
2. 配置从站控制信息
- 使用“ControlMotionIntegrator”创建新项目。
- 在“参数”→“MC通用设定”中设置EtherCAT通讯周期,选择根据StationAddress的设定值进行从站驱动器地址分配。
- 在“根据Slave的节点地址判断方法”中,遵循硬件设定的节点地址顺序。
- 通过“EtherCAT通信设定”导入从站信息,并添加从站驱动器。
3. PDO编辑与驱动器设置
- 在从站驱动器的“设备编辑器”中,对启动参数进行设定,注意PDO输入/输出数量不超过8个。
- 链接驱动的实际正反限位和原点,例如将IN4、IN5、IN3分别设为正反限位和近原点,限位开关应为常闭,原点开关应为常开。
三、 EtherCAT通信特点
EtherCAT协议的优势在于其快速响应和低延时,这使得它非常适合需要精确时间同步的运动控制应用。它的网络结构灵活,可以在线动态改变设备配置,简化了系统集成和维护。
四、驱动器参数调整
驱动器的参数设置至关重要,包括限位开关的定义、原点设置、电机参数的校准等。这些参数的正确配置确保了驱动器能够准确响应PLC的控制指令,实现平稳、安全的电机运行。
总结,通过上述步骤,用户可以成功地将 EtherCAT 技术应用于松下PLC和高创驱动器之间,实现两者高效、精准的通信控制,从而提升整个系统的性能和自动化水平。
EtherCat 松下 PLC 与我司 BDHDE 通信控制
EtherCAT 是目前工业以太网中一种主流的总线通讯协议,相比传
统的工业以太网,有着众多突出的优点、应用简单是 EtherCAT 总线
的一个显著特点。
一般调试流程:
1.硬件系统组件
2.组态主站和从站
3.配置各从站控制信息
4.设置控制参数
一.硬件系统组成
控制系统及软件:安装了 FPWIN GR7(V2280c), Control Motion
Integrator(V1040c) 调 试 软 件 、 松 下 PLC CPU 模 块 FP7 CPS31E ,
EtherCat 模块 AFP7MC16EC。
驱 动 部 分 : 1 套 驱 动 BDHD-0032AEB 及 电 机
PH2-M04B23035S30D
动软件部分:驱动固件 fw2.2.5BD21.4.29 及配置 XLM 文件
其他:外部电源
控制器的 USB 线与电脑连接;
控制器的 EtherCAT 口与驱动器的 C5 联接;
二. 组态主站和从站
1. 打开 FPWIN GR7 的编程环境,新建工程,选择对应型号 CPU
FP7 CPS31E
2.系统组态,从菜单栏中选择“选项”→“FP7 配置”→“IO
映射设置”,显示I/O 映射设置对话框,并进行CPU FP7 CPS31E,
下载后可阅读完整内容,剩余7页未读,立即下载
2023-06-20 上传
2023-06-20 上传
2023-06-20 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-10-30 上传
2024-10-30 上传
点击了解资源详情

「已注销」
- 粉丝: 1
- 资源: 20
 我的内容管理
展开
我的内容管理
展开







最新资源
- VOIP的配置资料1111111111111
- WindowsXP对宽带连接速度进行了限制,是否意味着我们可以改造操作系统,得到更快的上网速度
- myeclipse优化详解
- 多媒体与数字图像压缩技术
- 分页的JSP代码分页的JSP代码
- 面向对象系统设计循序渐进
- 小型游戏贪吃蛇的程序
- PIC 单片机的C 语言编程.pdf
- 第2代图像压缩技术回顾与性能分析.pdf
- 基于游程编码的分块交叉数字图像压缩算法.pdf
- 三星s3c2410数据手册
- OpenSceneGraph Quick Start__ Guide
- 快速成型中基于ST EP 的直接分层算法
- memcached中文学习文档
- 基于本体实现网页规则分类的方法
- EXT中文框架学习文档
