第七届飞思卡尔智能汽车竞赛直立方案解析
"清华直立方案是第七届全国大学生‘飞思卡尔’杯智能汽车竞赛电磁组直立行车的参考设计方案,包含程序设计、车体结构、调试策略等关键内容,旨在帮助参赛者理解和掌握直立行走控制技术。"
这篇文档详细介绍了电磁直立行走车模的设计与控制方法,涉及多个关键知识点:
1. **平衡控制**:车模直立行走的核心在于保持平衡,这需要精确控制车模的角度和速度。通过分析车模的受力情况和动态模型,采用反馈控制策略调整电机输出,以保持直立状态。
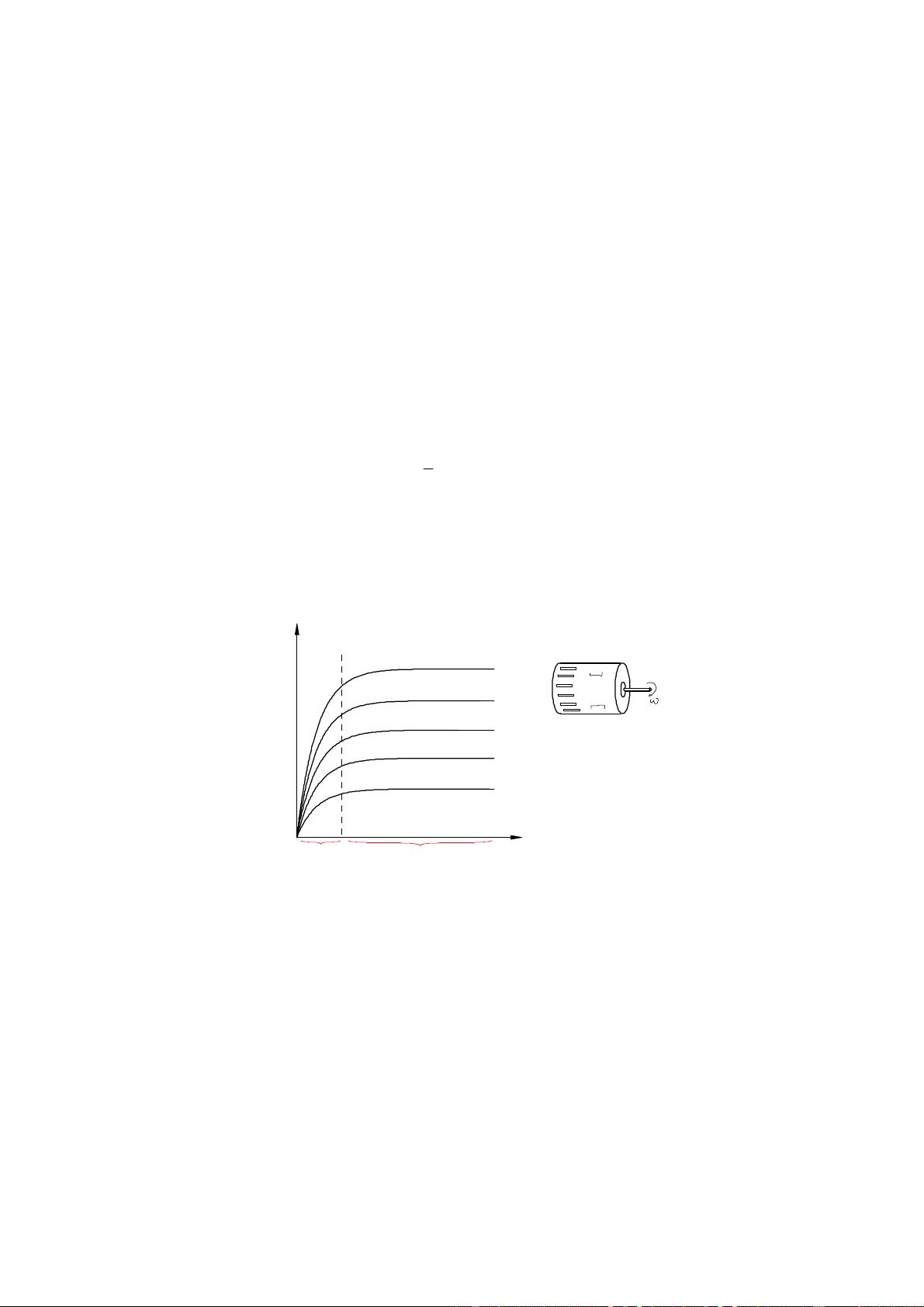
2. **速度控制**:速度控制与车模的平衡紧密相关,因为车速变化会影响车模的稳定性。文档中提到了电机在不同电压下的速度变化曲线,以及如何通过控制电机来调节车模的速度。
3. **方向控制**:车模不仅需要保持直立,还需要能灵活改变行驶方向。这涉及到对车模转动的精确控制,通常通过检测车模的角速度并进行相应的调整。
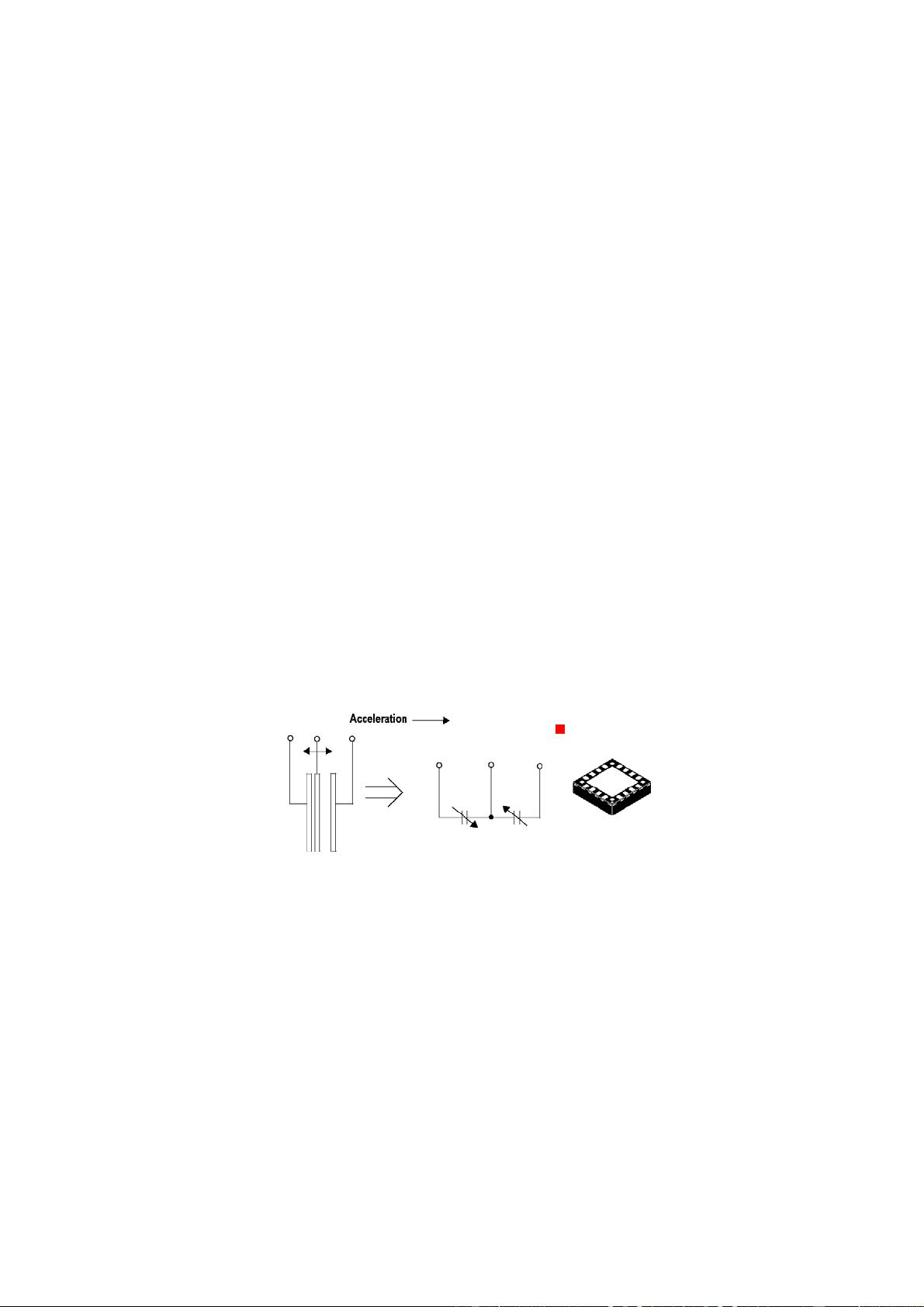
4. **传感器应用**:包括倾角传感器、速度传感器、电磁线检测传感器等,这些传感器用于实时监测车模的状态,为控制系统提供必要的数据输入。
5. **电路设计**:涵盖了整体电路框图,DSC(数字信号控制器)介绍,倾角传感器、电机驱动、速度传感器和电磁线检测电路的详细设计。这些电路是实现车模智能控制的基础。
6. **机械设计**:车模的简化改装、传感器的安装位置以及注意事项,这些都是确保车模稳定性和性能的重要环节。
7. **软件开发**:软件功能的规划、DSC的硬件资源配置,以及主要控制算法的实现,这部分内容是将硬件与控制策略结合的关键。
8. **车模调试**:提供了调试参数、调试条件,以及桌面静态和现场动态参数的调试方法,为优化车模性能提供指导。
9. **控制算法**:包括比例微分反馈控制,用于改善系统的响应和稳定性。文档中详细阐述了车模控制的数学模型和系统框图。
10. **方案改进与提升**:提出了方案的改进措施,以及如何整体提高车模的性能和竞争力。
总结来说,"清华直立方案"是关于电磁直立车模的一份综合教程,涵盖了从理论到实践的全部过程,对于理解和实施这类智能车模的控制策略具有很高的参考价值。
k
1
k
2
适当的类比和想
象,可以使我们
更容易理解控制
原理。
图 2‐10 车模控制两个系数作用
在上面简单分析中,通过类比倒立摆得到了车模直立的控制方案。下面对倒立车模
进行简单数学建模,然后建立速度的比例微分负反馈控制,根据基本控制理论讨论车模
通过闭环控制保持稳定的条件。
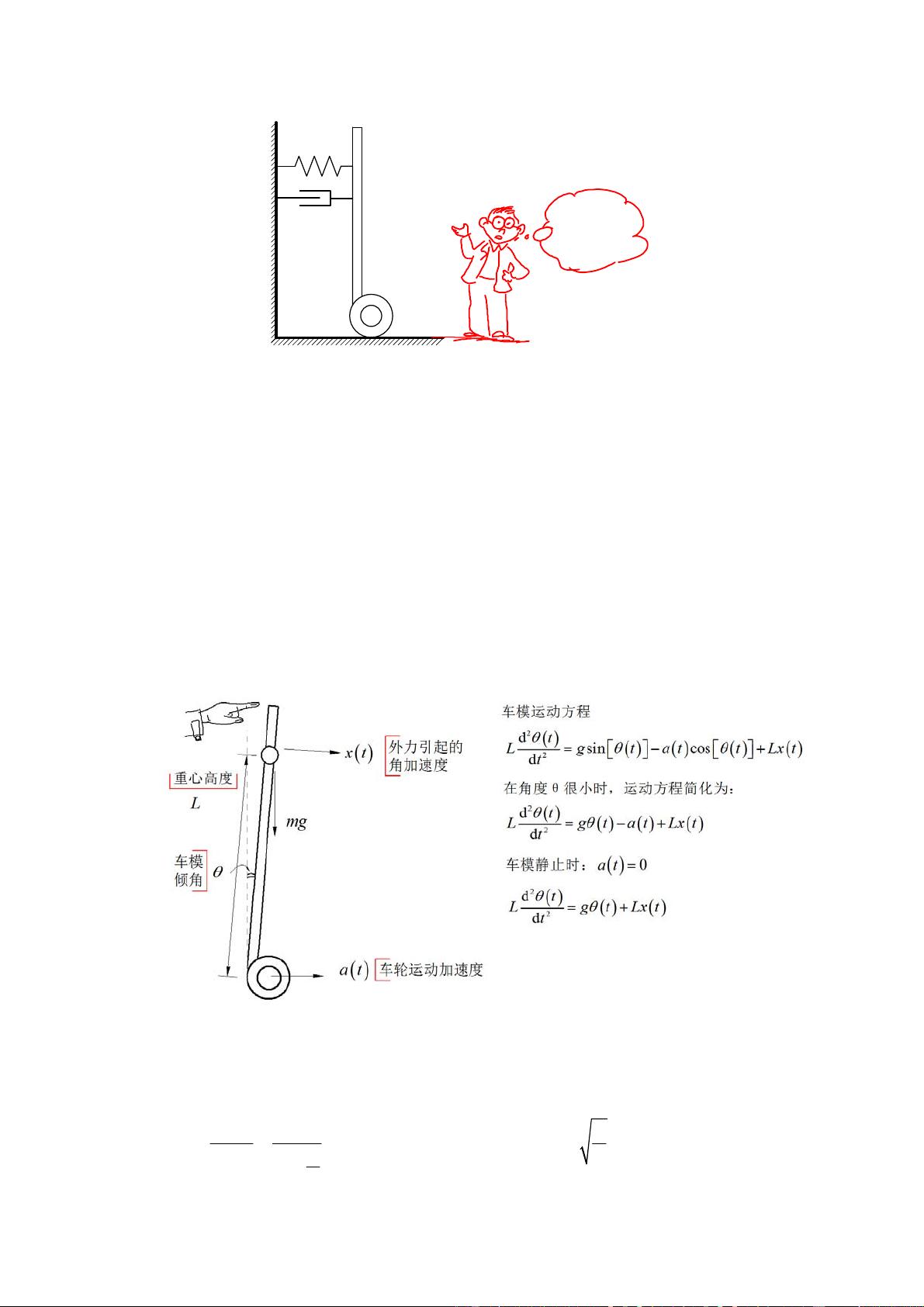
假设倒立车模简化成高度为 L,质量为 m 的简单倒立摆,它放置在可以左右移动的
车轮上。假设外力干扰引起车模产生角加速度 ()
x
t 。沿着垂直于车模地盘方向进行受力
分析,可以得到车模倾角与车轮运动加速度 以及外力干扰加速度()at ()
x
t 之间的运动方
程。如图 2-11 所示。
图 2‐11 车模运动方程
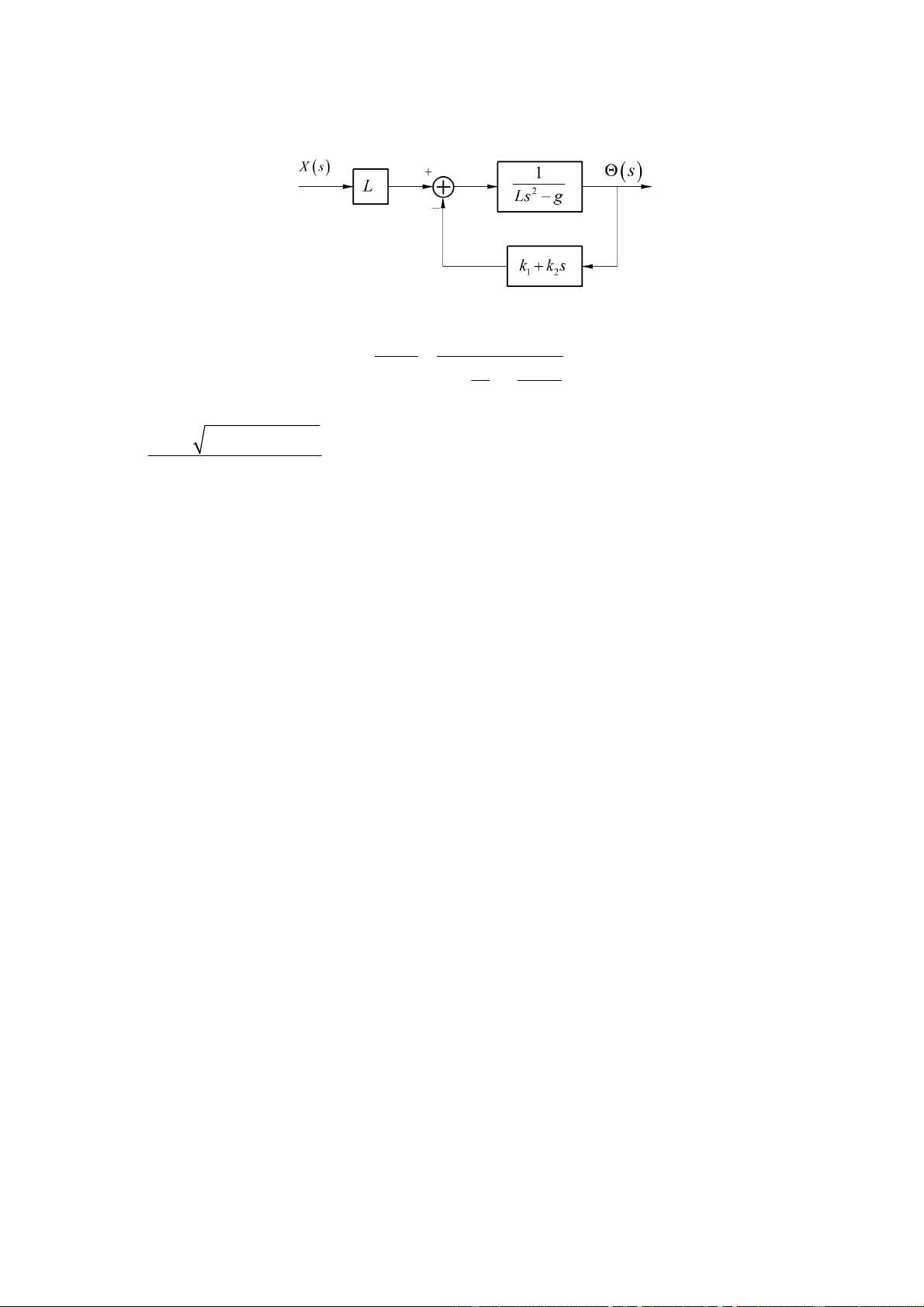
对应车模静止时,系统输入输出的传递函数为:
()
()
()
2
1
s
Hs
g
Xs
s
L
Θ
==
−
,此时系统具有两个极点
p
g
s
L
=±
。一个极点位于 s 平面的
16
剩余107页未读,继续阅读
478 浏览量
246 浏览量
478 浏览量
2283 浏览量
352 浏览量

u010281378
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- ARDUINO蓝牙例程.rar
- information-retrieval:unipd IR 课程的内容
- 家装空间3d模型
- 楚多齐尔
- BBSxp论坛 小蜜蜂
- MIPCMS内容管理系统 V2.1.2
- rosjava_core:支持 Android 的纯 Java ROS 实现
- darlinf-portar-proyectos
- react-app46031239595955455
- budget_tracker
- React_Krowdy-Video
- ionic HTML5 移动端开源框架 v3.7.1
- randomwalk:创建任意维度的随机游走-matlab开发
- Star Trek: Continuum:重制《星际迷航:完全重制家庭世界》-开源
- 企业广场:企业广场
- AndroidScanQRCode.rar.rar
