移动机器人路径规划:模型与方法解析
版权申诉
"该课件主要探讨了移动机器人的路径规划,包括基于模型和基于传感器的路径规划方法,以及全局和局部路径规划的区分。同时,提到了离线和在线路径规划的概念,并介绍了机器人动作规划的挑战,如起点到目标点的路径选择、避障和路径优化。课件还列举了多种路径规划技术,如人工势场法、基于几何构造的方法、栅格法以及智能化路径规划方法,如模糊逻辑、神经网络和遗传算法的应用。"
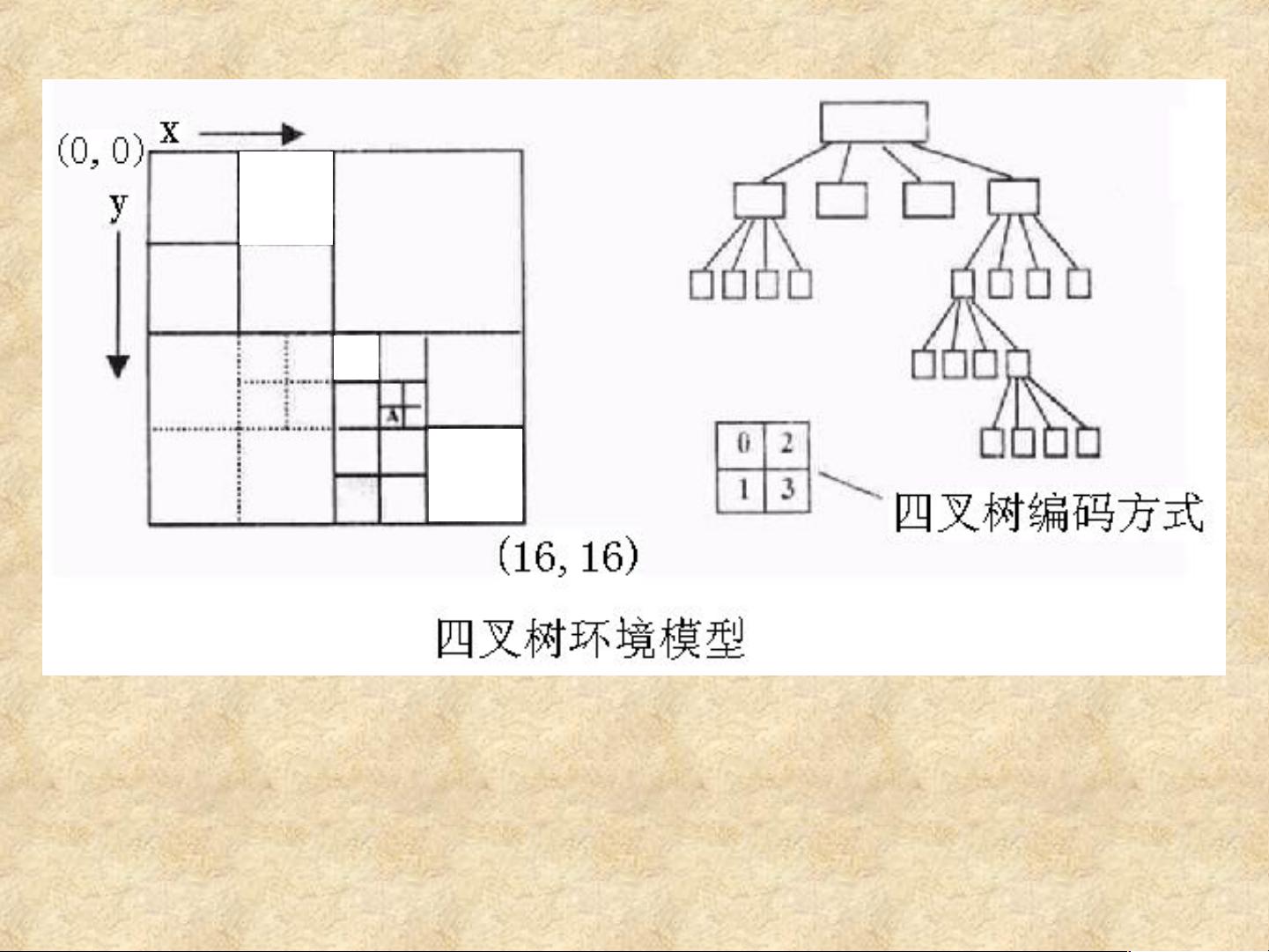
移动机器人的路径规划是机器人学中的关键问题,它涉及到如何在复杂环境中找到一条从起点到终点的有效且安全的路径。路径规划通常可以分为两类:基于模型和基于传感器的方法。基于模型的方法利用预先获取的环境信息,如c-空间法、自由空间法、网格法、四叉树法和矢量场流的几何表示法,常采用A*或遗传算法进行搜索。而基于传感器的路径规划则在未知或部分未知的环境中,依赖实时传感器数据。
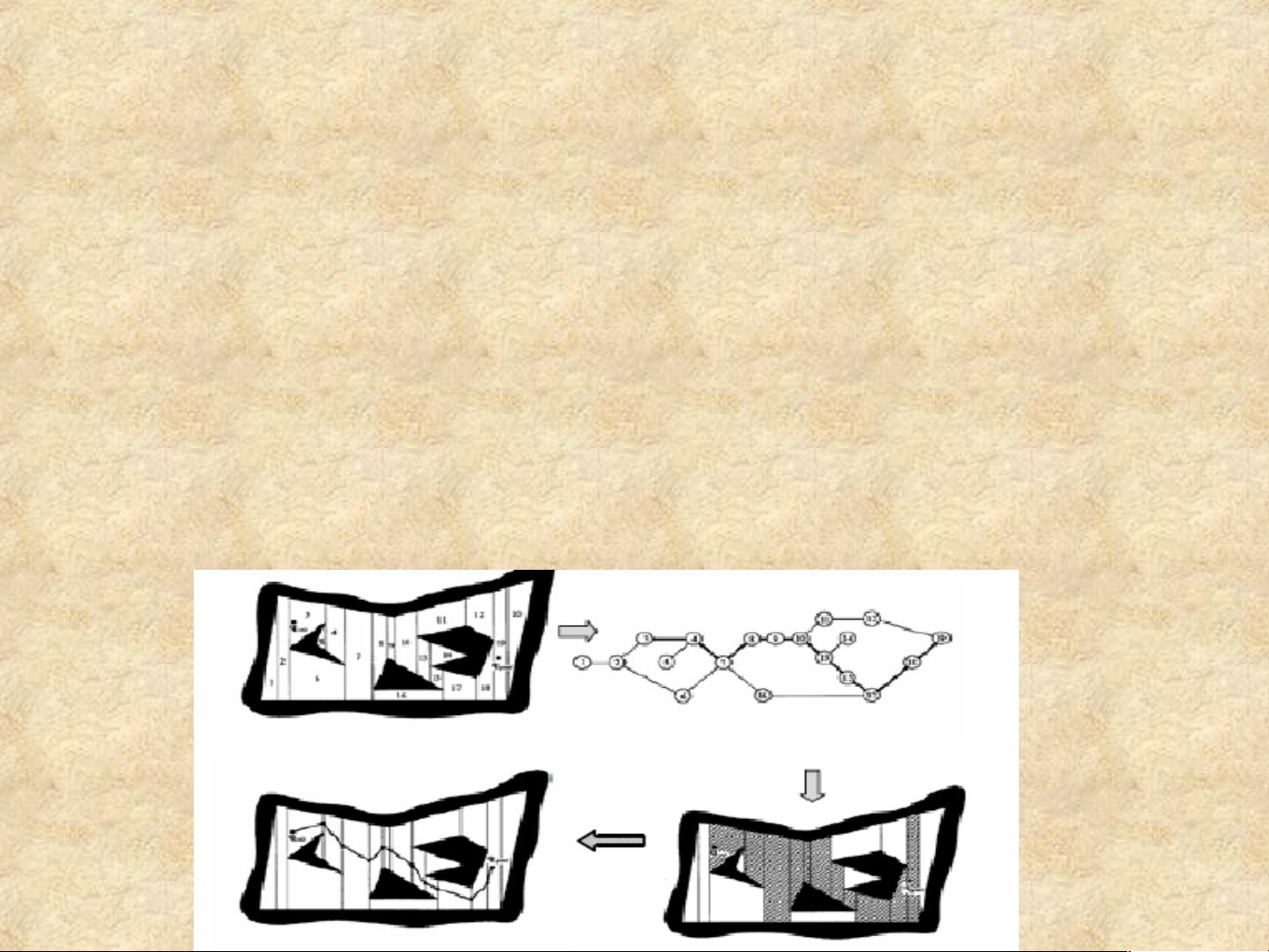
路径规划又可细分为全局路径规划和局部路径规划。全局路径规划适用于环境信息已知的情况,它将全局目标分解为局部目标,常见方法有可视图法和环境分割法。局部路径规划则关注机器人的实时定位和路径跟踪,常用人工势场法和模糊逻辑算法。
此外,路径规划还有离线和在线之分。离线路径规划在静态环境中预先计算,而在线路径规划则在动态环境中实时进行,通常依赖于传感器信息。
在实际操作中,移动机器人的动作规划涉及多个自由度,不仅包括位置,还包括姿态。例如,一个6足爬行虫可能需要在3D空间中规划路径,考虑位置和姿态的变化。路径规划的目标是找到一条避开障碍物的最优路径,满足从初始位置到目标位置,同时兼顾路径的优化。
路径规划方法多样,包括传统的可视图法、自由空间法、栅格法和人工势场法,这些方法在解决避障和路径优化方面各有优势。人工势场法通过模拟引力和斥力场来引导机器人避开障碍物。而智能化路径规划方法,如模糊逻辑、神经网络和遗传算法,则引入了更高级别的学习和适应能力,使得机器人能更好地应对复杂和变化的环境。
2021-09-21 上传
2021-09-21 上传
2021-09-21 上传
2022-06-16 上传
2021-09-16 上传
2021-09-22 上传
2021-07-01 上传
2022-11-13 上传
2021-10-11 上传

智慧安全方案
- 粉丝: 3806
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- StarModAPI: StarMade 模组开发的Java API工具包
- PHP疫情上报管理系统开发与数据库实现详解
- 中秋节特献:明月祝福Flash动画素材
- Java GUI界面RPi-kee_Pilot:RPi-kee专用控制工具
- 电脑端APK信息提取工具APK Messenger功能介绍
- 探索矩阵连乘算法在C++中的应用
- Airflow教程:入门到工作流程创建
- MIP在Matlab中实现黑白图像处理的开源解决方案
- 图像切割感知分组框架:Matlab中的PG-framework实现
- 计算机科学中的经典算法与应用场景解析
- MiniZinc 编译器:高效解决离散优化问题
- MATLAB工具用于测量静态接触角的开源代码解析
- Python网络服务器项目合作指南
- 使用Matlab实现基础水族馆鱼类跟踪的代码解析
- vagga:基于Rust的用户空间容器化开发工具
- PPAP: 多语言支持的PHP邮政地址解析器项目
