CAN-bus V2.0中文规范解析
需积分: 10 65 浏览量
更新于2024-07-15
收藏 402KB PDF 举报
"CAN-busV2.0中文版.pdf"
CAN-bus(Controller Area Network,控制器局域网络)是一种高效、可靠且实时性强的串行通信协议,广泛应用于汽车电子、自动化、工业控制等领域。CAN-bus V2.0版本是在原有的CAN 1.2规范基础上进行了扩展,以满足更广泛的应用需求。
在CAN-bus V2.0中,报文识别位(ID)分为两种格式:标准格式和扩展格式。标准格式的ID由11位定义,而扩展格式的ID则扩展到了29位,提供更大的地址范围,使得系统设计者可以更加灵活地分配和标识不同的通信节点和消息。对于那些不需要扩展ID范围的系统,仍然可以选择使用标准格式,以保持与现有设备的兼容性。
规范的A部分详细介绍了按照CAN 1.2规范定义的报文格式,这是所有CAN设备的基础。B部分则进一步解释了标准格式和扩展格式的差异和使用情况,确保了CAN2.0兼容性。值得注意的是,只有在使用扩展格式时,才需要考虑A部分和B部分的区别,否则,基于A部分或旧版本CAN设计的设备仍可与遵循B部分的设备相互通信。
CAN-bus的数据传输包括数据帧、远程帧、错误帧和过载帧等不同类型的帧。数据帧用于传输实际数据,远程帧用于请求数据,错误帧用于报告网络中的错误,过载帧则用于协调节点间的通信速率。每个帧都包含报文ID、数据字段以及校验序列,以确保数据的完整性和准确性。
在报文校验方面,CAN-bus采用了循环冗余校验(CRC)来检查数据错误。编码机制确保了信号在物理层的稳定传输,同时错误处理机制包括错误检测和错误标定,能够在出现错误时迅速响应,以维护网络的稳定性。故障界定功能允许网络在某个节点故障时继续运行,提高系统的容错能力。
位定时要求是CAN通信的关键,它确保了所有节点在同一时间点对同一比特的采样,从而保证同步。CAN-bus V2.0还考虑了增加CAN振荡器的容差,以适应不同硬件条件下的时钟同步问题,通过协议修改增强了网络的鲁棒性。
CAN-bus V2.0中文版详细阐述了CAN通信协议的关键要素,包括报文格式、数据传输、错误处理和系统兼容性,为设计和实现CAN网络提供了全面的指导。
广州周立功单片机发展有限公司 Tel: 020-38730976 38730977 Fax:38730925 http://www.zlgmcu.com
- 7 -
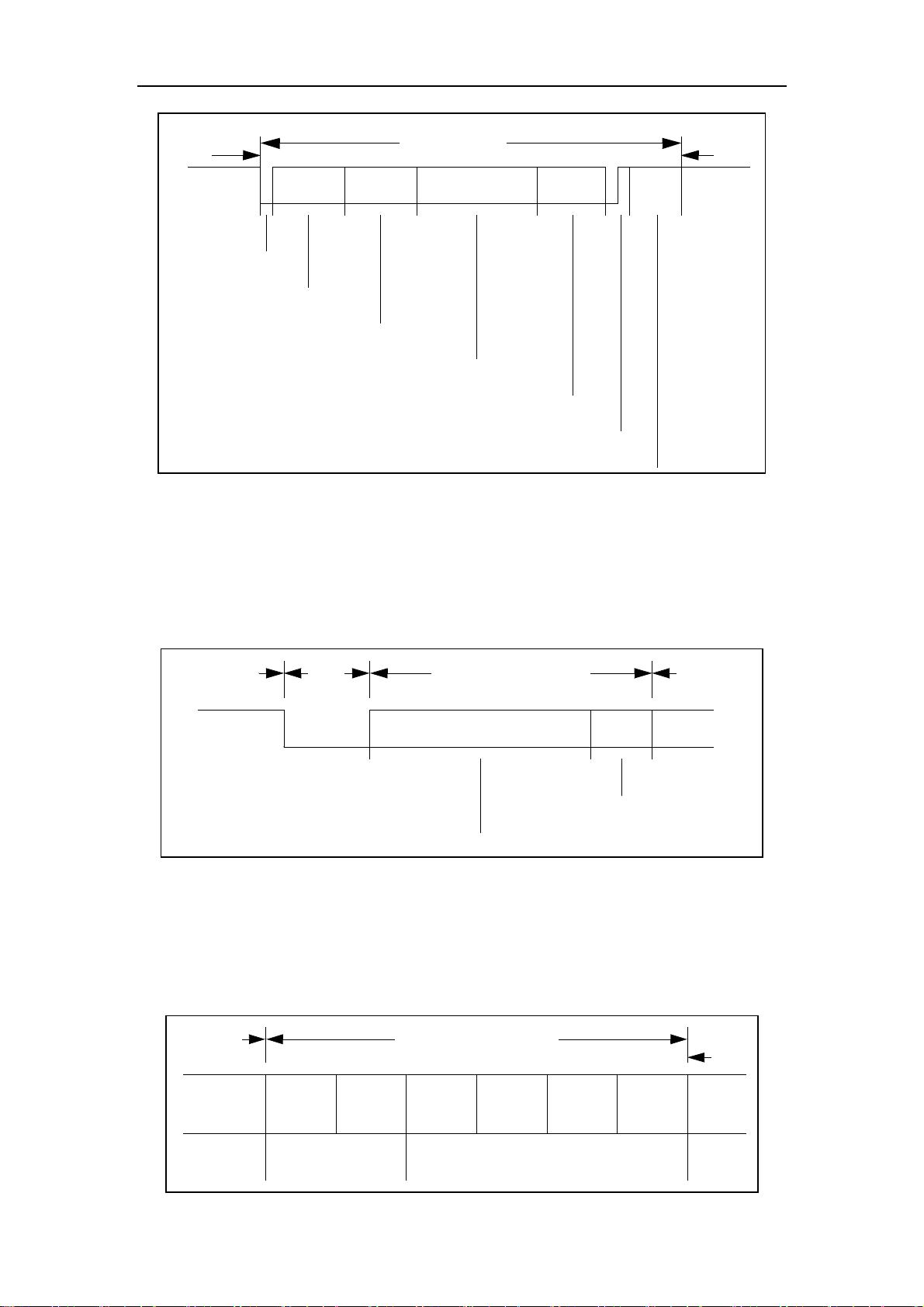
Interframe
Space
Interframe
Space
Start of Frame
Arbitrat ion Field
Cont rol Field
Data Field
CRC F i el d
AC K F ield
End of Frame
or
Overload
Fr a me
DATA F RAME
仲裁场
仲裁场包括识别符和远程发送请求位(RTR)。
识别符:识别符的长度为 11 位。这些位的发送顺序是从 ID-10 到 ID-0。最低位是 ID-0。最高的 7 位
(ID-10 到 ID-4)必须不能全是“隐性”。
RTR 位:该位在数据帧里必须为“显性”,而在远程帧里必须为“隐性”。
Interframe
Space
St a r t
of Frame
Identifier
RT R B i t
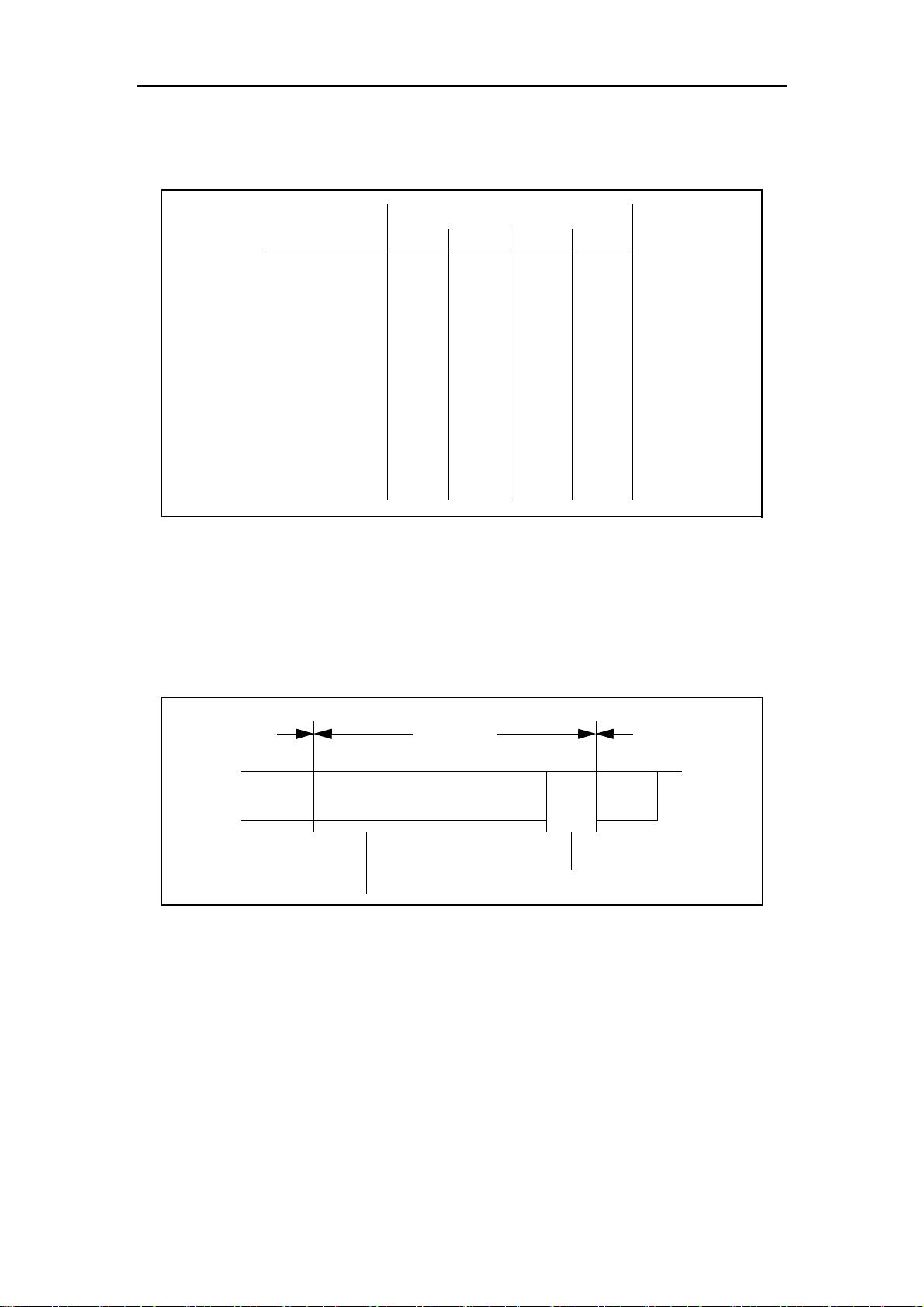
Co n t r o l
Fi e ld
AR BI TRATION F IELD
控制场
控制场由 6 个位组成,包括数据长度代码和两个将来作为扩展用的保留位。所发送的保留位必须为“显
性”。接收器接收所有由“显性”和“隐性”组合在一起的位。
数据长度代码:数据长度代码指示了数据场中字节数量。数据长度代码为 4 个位,在控制场里被发送。
r1 r0 DLC3 DLC2 DLC1 DLC 0
or
CRC
Fi e l d
Ar bit ration
Fi e l d
Dat a
Fi e l d
CO N T RO L F IE L D
Dat a Lengt h Codereserved
bits
剩余35页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-03-06 上传
2020-06-07 上传
2021-11-29 上传
2020-03-07 上传

花开未先岸
- 粉丝: 2
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
