移动机器人未知环境探索与地图构建策略研究
20 浏览量
更新于2024-08-25
收藏 602KB PDF 举报
"这篇研究论文探讨了在未知环境中移动机器人如何进行环境探索和地图构建的问题。作者团队包括来自郑州大学电气工程学院的王东舒、段义海以及西门子中国的王佳。他们提出了一种结合避障功能的适配环境探索策略,并针对候选路径的生成和评估问题提出了有效方法,旨在最大化预期的信息增益,保持环境信息的整合,确保环境探索的连续性和全面覆盖。新提出的评估方法解决了仅关注单一标准而忽视其他因素的缺点。"
在未知环境中,移动机器人的环境探索与地图构建是机器人自主导航和定位的关键技术之一。这篇研究论文深入研究了这一领域,目标是使机器人能够在没有预先知识的情况下,有效地探索其周围环境并构建精确的地图。该过程中,实时数据至关重要,特别是激光传感器提供的数据,这些数据用于感知环境中的障碍物和地形特征。
研究团队提出了一种策略,该策略不仅能够帮助机器人避开障碍,还能保证其在未知环境中的探索效率。在候选路径的生成阶段,他们设计了方法来优化路径选择,以获取最大的预期信息增益。这意味着机器人会选择那些最有可能揭示新环境信息的路径,而不是简单地遵循单一的最优路径准则。
同时,为了保持环境信息的一致性和完整性,他们还引入了信息整合的策略。这有助于确保地图的质量,避免因为局部信息的缺失或错误而导致的整体理解偏差。此外,连续性和全面性是环境探索的两个关键要求,研究中提出的方法旨在确保机器人能够无间断地探索所有可达区域,而不遗漏任何部分。
评估方法的改进是该研究的亮点之一。传统的评估方法可能过于专注于某一特定标准,如距离最短或能耗最低,而忽视了其他重要因素,如信息获取量或环境复杂度。新方法旨在平衡这些因素,以实现更全面和适应性强的决策。
这项研究对于推动移动机器人在未知环境中的自主导航技术发展具有重要意义,为未来的机器人应用,如搜索与救援、自动化物流、火星探测等领域提供了理论和技术支持。通过这种综合性的探索和建图策略,机器人可以在未知环境中更加智能和高效地行动。
Environment exploration and map building of mobile robot in unknown environment 243
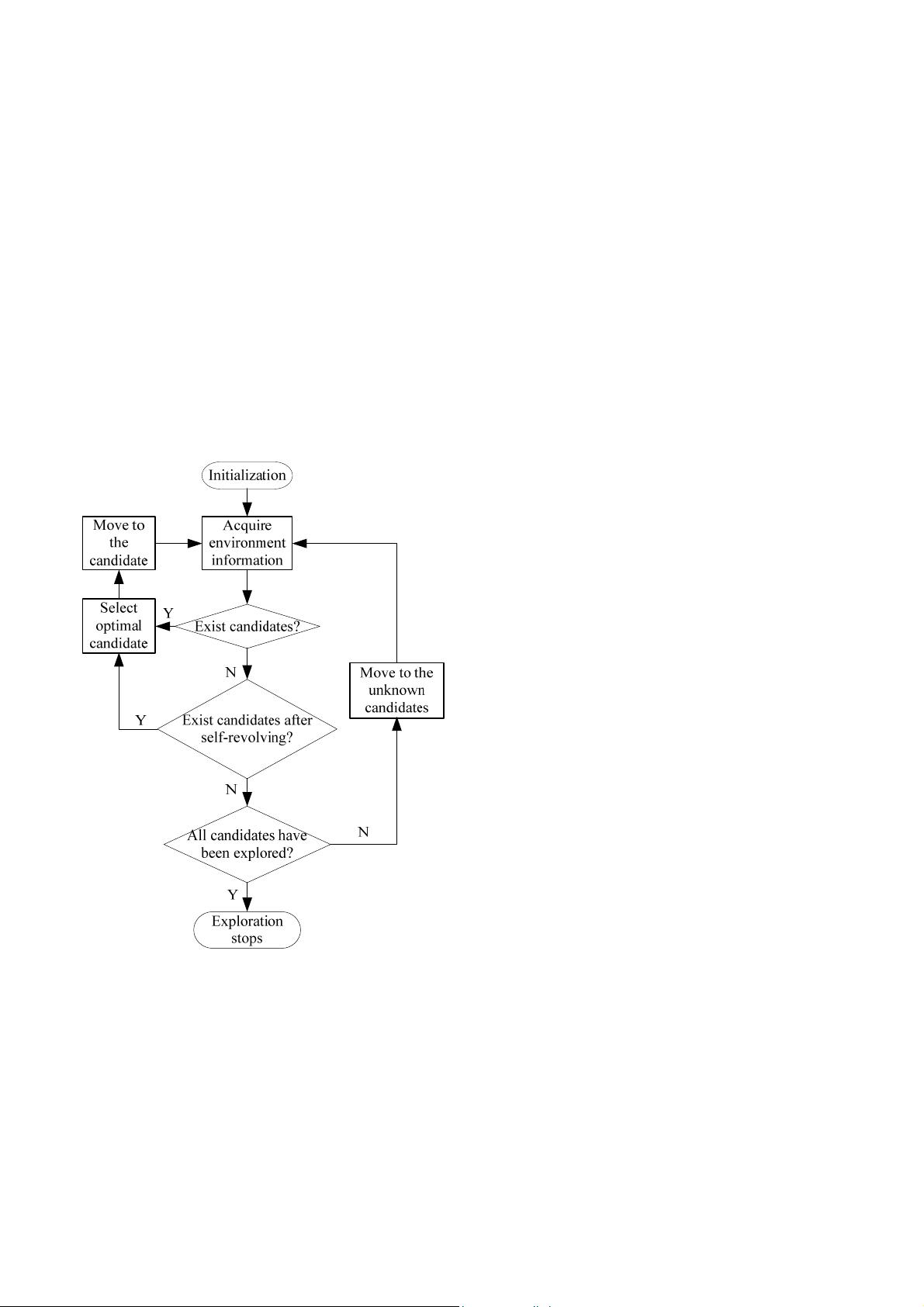
2 Analyse and calculate the environment information
acquired. If there is candidate, goes to step 3;
otherwise, goes to step 4.
3 Select the optimal candidate from all the candidates,
and marked this candidate as known one, goes to step 1.
4 Robot checks whether there exist candidates, if so, goes
to step 3; otherwise, goes to step 5.
5 Robot checks whether all the candidates have been
marked as explored. If there still exist un-explored
candidates, the robot moves to these candidates and the
flow goes to step 1; otherwise, the exploration
procedure ends.
The two important steps in this flowchart are candidate’s
producing and evaluating, and we will explain these two
steps in detail.
Figure 1 Environment exploration flowchart
3 Producing and evaluating of candidates
3.1 Candidate producing
Candidate producing in this paper refers the Frontier
exploration, but this method easily loses the environment
information and is difficult to cover the whole environment,
so the environment map generated is not integrated.
Besides, candidates are generally located on the frontier
area and the robot has to travel a long distance. Combining
with the concrete environment, this paper chooses the
candidate which can maximise the information gain and
also satisfy the requirements of environment exploration.
Because the concrete environments are different, it is
difficult to depict all the cases, so this paper only explains
these cases which the robot meets most frequently.
1 No obstacle in front of the robot, and the frontier edge
is integrated
If there is no obstacle in the front exploration area, and
the frontier edge is an integrated semi-circle as
described in Figure 2, the robot should keep the moving
direction unchanged, and select a location in front as
the candidate. Considering the environment information
losing, the distance between the robot current location
and candidate should be not large. After travelling
certain distance, robot needs to explore the surrounding
environment again.
As in Figure 2, when robot is located at position A, it
explores the environment and finds that the explored
area is free space, the frontier is an integrated
semi-circle. The robot keeps its moving direction and
travel certain distance to position B, explores the
environment again. Because the travel distance is not
far, the omitted environment information is not large,
so it does not influence the environmental traversal.
The distance between position A and B is related with
the laser scanner’s measure scope and can not adopt a
too large value.
2 Frontier is divided by obstacle
First we should determine how many segments of the
frontier divided by obstacle. Generally, we choose a
candidate on each continuous frontier. The number of
continuous frontier is same as that of the candidate. The
location of the candidate generally locates at the middle
position of the line made by the two end points of the
continuous frontier edge.
As described in Figure 3(a), the frontier is divided into
two parts by the yellow obstacle, one part is arc AB and
line BC, the other is line DE and arc EF. So we can
only select two candidates which locate on the middle
points of line AC and DF, denoted by o1 and o2,
respectively.
As shown in Figure 3(b), the frontier is divided into a
continuous one by the obstacle, so we can only select
one candidate, and the method is same as above.
The candidate locates at the middle point of the line
made by the two end points of the continuous
frontier. This case often exists in corridor or narrow
route-way.
3 No frontier in front of the robot
No frontier in front of the robot indicates that the robot
goes into a ‘dead end’, the front area is obstacle or
already known field. If there are candidates without
having been explored, the robot should move to these
candidates. If all the candidates are marked as explored,
the robot should end the exploration.
下载后可阅读完整内容,剩余11页未读,立即下载
相关推荐


weixin_38618746
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开








最新资源
- Lodop6.0:功能强大的Web打印控件介绍
- 快速报表设计工具QuickReport-XE5版功能详解
- PLSQLDeveloper 7.14 注册方法详解
- 电脑属性自定义修改指南与OEM修改助手
- SQL VB进销存系统设计实战教程
- 基于ASP.Net 2.0的中学视频资源库管理系统设计与实现
- log4j使用教程与详细解析
- 屏幕录像专家网络版深度解析:服务器与客户机模式
- U-NSGA-III多目标优化算法的Matlab实现介绍
- Matlab实现无约束优化问题求解方法
- 构建基于JSP技术的网上购物商城系统
- 王向慧《微型计算机原理与接口技术》教案及答案解析
- Opnet16.0经典培训实例分享
- 2020商务风工作总结PPT模板免费下载
- Notepad++ JSON格式化插件安装与使用指南
- Nacin博客最后更新时间及互联网2011年难题解析
