基于ARM的橡塑机械双层网络监控系统设计
49 浏览量
更新于2024-08-30
收藏 276KB PDF 举报
"基于ARM的橡塑机械双层网络设计,结合了嵌入式Linux和CAN总线技术,实现了一个集实时监控、现场操作和远程维护功能于一体的系统。该设计涉及CAN底层驱动程序开发、多任务优先级调度以及嵌入式WEB服务器的移植与动态访问模式的构建。该系统已成功应用在抽真空平板硫化机的控制中,展现出优秀的监控性能。"
本文主要探讨了在嵌入式系统和ARM技术背景下,如何为橡塑机械设计一个高效的双层网络监控系统。首先,系统的核心是采用AKM9处理器和嵌入式Linux操作系统,利用CAN(Controller Area Network)总线技术作为设备间的通信桥梁,实现了设备的实时监控和数据交换。CAN总线技术以其高速、可靠和抗干扰性强的特点,适用于橡塑机械这种对实时性要求高的场合。
系统设计中,重点在于CAN底层驱动程序的开发,这允许系统与CAN总线上的各个节点进行通信。同时,通过实现总线上多任务的优先级调度,确保关键任务能够及时执行,提高系统的响应速度和稳定性。此外,为了实现远程监控和维护,系统还集成了嵌入式WEB服务器,使得用户可以通过网络动态访问设备状态,发送指令,从而增强了系统的远程操作能力。
在硬件层面,该设计选用了基于ARM9内核的微处理器,如S3C24系列,这种处理器具有高性能、低功耗的优势,适合用于工业环境中的嵌入式应用。整个硬件架构包括了CPU、存储器、接口电路等,以满足系统对数据处理、存储和通信的需求。
应用实例表明,这种基于ARM的双层网络设计在抽真空平板硫化机的控制系统中表现优异,能够提供准确的实时监控数据,优化生产过程,并便于进行远程故障诊断和维护,极大地提升了橡塑机械的工作效率和可靠性。
随着科技的发展,橡塑机械行业对自动化、智能化的要求越来越高。基于ARM的嵌入式系统和CAN总线技术的结合,为实现这些需求提供了有效的解决方案。未来,这样的系统设计有望在更多橡塑机械中得到推广,进一步推动橡塑制造行业的现代化进程。
嵌入式系统嵌入式系统/ARM技术中的基于技术中的基于ARM的橡塑机械双层网络设计的橡塑机械双层网络设计
摘要:针对橡塑机械对监控的需求,设计了一款以AKM9、嵌入式Linux为核心,以CAN总线技术和网络技术为
支持的,集成了实时监视、现场操作、远程维护为一体的双层网络型.。本设计实现了CAN底层的驱动程序和总
线上多任务按优先级的调度执行,完成了嵌入式WEB服务器的移植和动态访问模式的搭建。.已经成功应用于抽
真空平板硫化机的控制系统中,并取得了良好的监控效果。 0 引言 橡塑机械是现代制造技术中一类重
要工具,是一种由数控装置、伺服驱动装置、机床主体和其他辅助装置构成的机电一体化产品,它被广泛应用
在橡塑产品加工制造领域。随着科技的进步,橡塑机械正朝着高速度、智能化、多功能化、高可靠性的方
摘要:针对橡塑机械对监控的需求,设计了一款以AKM9、嵌入式Linux为核心,以CAN总线技术和网络技术为支持的,
集成了实时监视、现场操作、远程维护为一体的双层网络型.。本设计实现了CAN底层的驱动程序和总线上多任务按优先级的
调度执行,完成了嵌入式WEB服务器的移植和动态访问模式的搭建。.已经成功应用于抽真空平板硫化机的控制系统中,并取
得了良好的监控效果。
0 引言
橡塑机械是现代制造技术中一类重要工具,是一种由数控装置、伺服驱动装置、机床主体和其他辅助装置构成的机电一体
化产品,它被广泛应用在橡塑产品加工制造领域。随着科技的进步,橡塑机械正朝着高速度、智能化、多功能化、高可靠性的
方向发展。在监控系统方面,尤其是近年来,也发展得更为集成化、网络化。作为提升橡塑机械性能的一个重要组成部分,其
监控系统也得到了长足的发展。本文设计了一款基于ARM9、嵌入式Linux以及CAN总线技术的应用于橡塑机械的双层网络.,
并介绍了成功应用于橡塑机械的实例。
1 双层网络系统整体设计
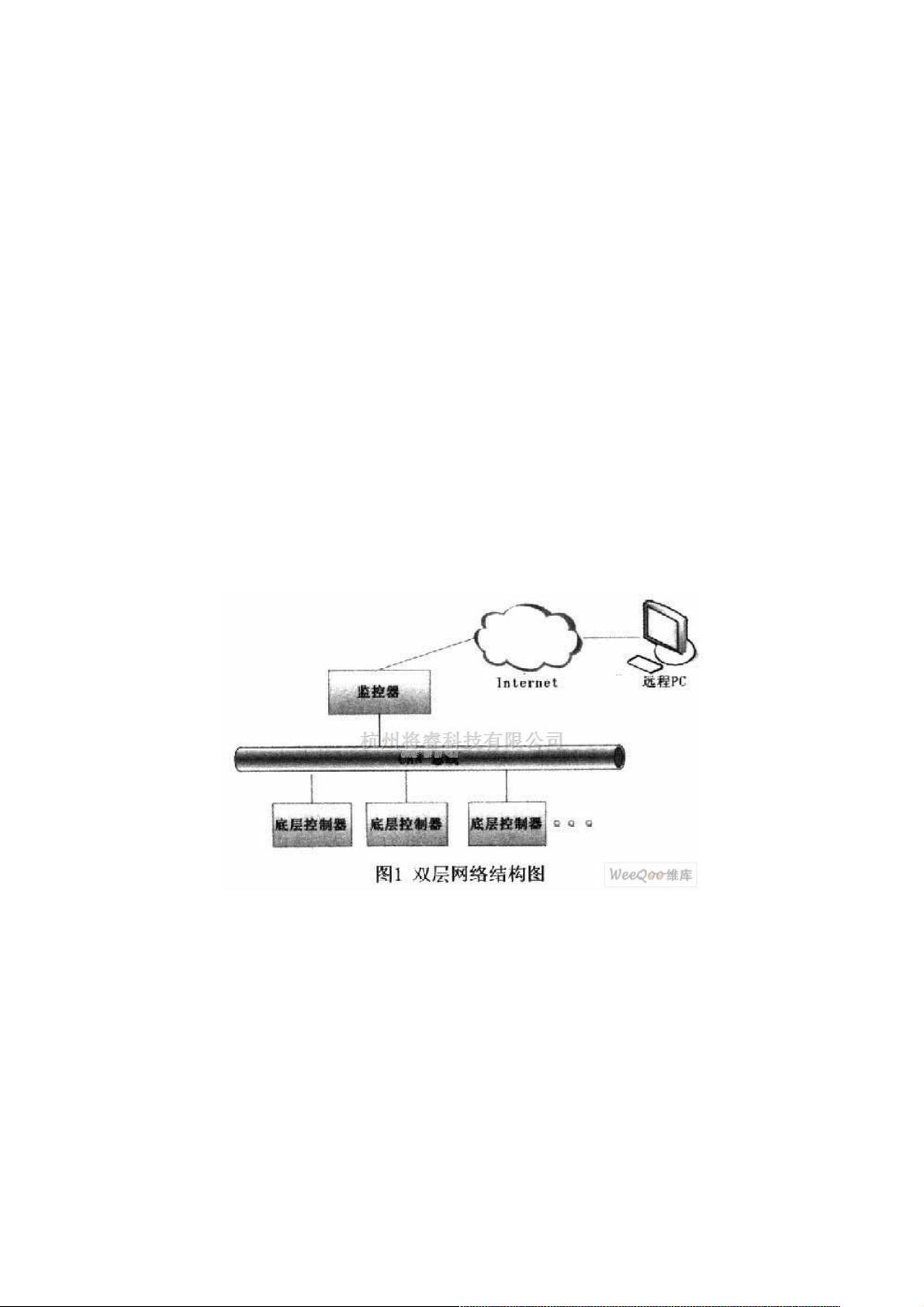
系统基于工业现场监控集成化、自动化的理念设计了下层CAN总线结构。在现场监控部分,.所需要完成的工作包括:通
过CAN总线与底层控制器交互,读取并显示橡塑机械当前工作的状态,配置并发送需要修改的运行参数。
在CAN现场总线的基础上,基于远程维护监控的理念,设计了上层的网络支持。在上层网络部分,.提供WEB服务器,根
据远程PC的请求发送相应的数据。网络结构如图1所示。
2 硬件系统设计
硬件系统采用了以ARM9内核CPU为主体的组织体结构。选择了S3C2410为核心,扩展了64M SDRAM和64M NAND
FLASH的硬件系统。由于该CPU内部并未集成CAN总线控制器以及以太网控制器,因此通过MCP2510以及CS8900A分别扩
展了CAN总线功能和以太网功能。以下对两个扩展部分做重点介绍。
2.1 CAN总线扩展
MCP2510完全支持CAN总线V2.0A/B技术规范,能够发送和接收标准和扩展报文,同时具备验收过滤以及报文管理功
能。该器件包含三个发送缓冲器和两个接收缓冲器,能够减少S3C241O芯片的管理负担和软件设计的负担。
接口中使用了总中断引脚INT,处理器在响应总中断后,通过SPI通道访问MCP2510内部相应寄存器来确定具体的中断事
件,并对其做出处理。
如图2所示,S3C2410通过SPI总线发送MCP2510控制命令以及需要传输的数据,通过MCP2510控制转换以后生成总线
报文,并通过光电隔离器6N137以及总线驱动器8C250之后发送到CAN总线上。
下载后可阅读完整内容,剩余4页未读,立即下载
2020-11-08 上传
2020-10-20 上传
2020-12-10 上传
2020-11-18 上传
2020-12-13 上传
2020-11-11 上传
2020-10-21 上传
点击了解资源详情
点击了解资源详情

weixin_38508549
- 粉丝: 5
- 资源: 917
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
