
Sensors 2019, 19, 2672 4 of 16
background.
B
(
x
i
)
is initialized by the N pixel values that are firstly observed by the algorithm. N is a
fixed constant in the PBAS method. B
j
(
x
i
)
consists the pixel’s value v
j
(
x
i
)
, gradient value m
j
(
x
i
)
:
B
j
(
x
i
)
=
n
v
j
(
x
i
)
, m
j
(
x
i
)
o
, j = 1, 2, . . . , N (2)
The foreground segmentation mask is calculated as:
F
(
x
i
)
=
(
1, #
dist
(
x
i
, B
k
(
x
i
))
< R
(
x
i
)
< #
min
0, else
(3)
where F = 1 means foreground, otherwise background.
B
k
(
x
i
)
denotes the k-th sample in the background
model. #{...} denotes the number of the background samples which satisfy the condition in the brackets.
dist
(
x
i
, B
k
(
x
i
))
for each channel is calculated as follows:
dist
(
x
i
, B
k
(
x
i
))
= |v
(
x
i
)
− v
j
(
x
i
)
| + (c/I
m
) ∗ |m
(
x
i
)
− m
j
(
x
i
)
| (4)
where c is a fixed parameter. I
m
is the mean of the gradient values of all pixels in the previous frame.
Sensors 2019, 19, x FOR PEER REVIEW 4 of 16
𝐵
(
𝑥
)
=
𝑣
(
𝑥
)
,
𝑚
(
𝑥
)
,
𝑗
=
1
,
2
,
…
,
𝑁
(2)
Figure 1. Overview of the pixel-based adaptive segmenter (PBAS) method.
The foreground segmentation mask is calculated as:
𝐹
(
𝑥
)
=
1
,
⋕
𝑑𝑖𝑠𝑡
𝑥
,
𝐵
(
𝑥
)
<
R
(
𝑥
)
<
#
0
,
else
(3)
where F = 1 means foreground, otherwise background. 𝐵
(𝑥
) denotes the k-th sample in the
background model. #{...} denotes the number of the background samples which satisfy the condition
in the brackets. dist(𝑥
, B
(
𝑥
)
) for each channel is calculated as follows:
𝑑𝑖𝑠𝑡
𝑥
,
𝐵
(
𝑥
)
=
𝑣
(
𝑥
)
−
𝑣
(
𝑥
)
+
(
𝑐
𝐼
)
∗
𝑚
(
𝑥
)
−
𝑚
(
𝑥
)
⁄
(4)
where c is a fixed parameter. 𝐼
is the mean of the gradient values of all pixels in the previous frame.
In Equation (3), 𝑅(𝑥
) denotes 𝑥
’s distance threshold. 𝑅(𝑥
) needs to automatically adjust as
follows:
(
𝑥
)
=
𝑅
(
𝑥
)
∗
1
−
𝑅
/
,
if
𝑅
(
𝑥
)
>
d
∗
𝑅
𝑅
(
𝑥
)
∗
1
+
𝑅
/
,
else
(5)
where 𝑅
/
and 𝑅
are fixed parameters in PBAS. R_lower is the lower bound of R
(
𝑥
)
. In
PBAS, R_lower is a fixed parameter which is set to 18. The other parameter is learning rate 𝑇(𝑥
). The
PBAS method defines the updating rules of 𝑇(𝑥
) as follows:
𝑇
(
𝑥
)
=
𝑇
(
𝑥
)
+
𝑇
/
𝑑
(
𝑥
)
,
if
𝐹
(
𝑥
)
=
1
𝑇
(
𝑥
)
−
𝑇
/
𝑑
(
𝑥
)
,
if
𝐹
(
𝑥
)
=
0
(6)
where 𝑇
and 𝑇
are fixed parameters. The update speed of the background model is inversely
related with 𝑇
(
𝑥
)
. The range of 𝑇
(
𝑥
)
’s variation is specified by the PBAS method to prevent the
background model from being updated too quickly or too slowly.
2.2 The Proposed Method
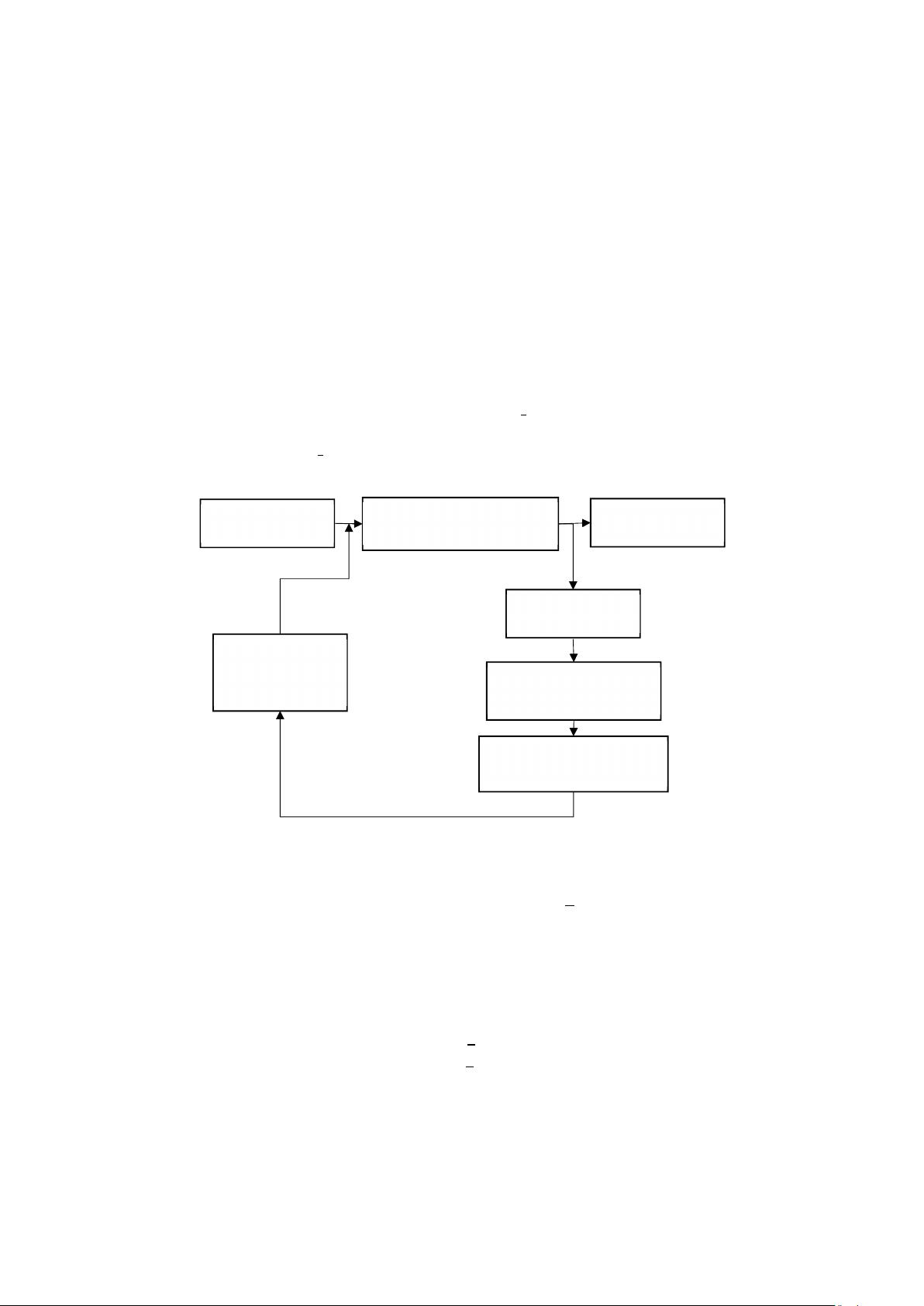
The process diagram of the proposed method is shown in Figure 2. In this section, we explain in
detail the similarities and differences between our WePBAS algorithm and PBAS algorithm. The
segmentation decision, background model update mechanism, preprocessing, and reinitialization
part of the WePBAS are introduced in this section.
Input image
Background/foreground
classification
Output image
Update background
model
Compute 𝑑
Update distance threshold
𝑅
(
𝑥
)
Update learning rate
𝑇
(
𝑥
)
Figure 1. Overview of the pixel-based adaptive segmenter (PBAS) method.
In Equation (3),
R
(
x
i
)
denotes
x
i
’s distance threshold.
R
(
x
i
)
needs to automatically adjust as follows:
(
x
i
)
=
(
R
(
x
i
)
∗
(
1 − R
inc/dec
)
, if R
(
x
i
)
> d
min
∗ R
scale
R
(
x
i
)
∗
(
1 + R
inc/dec
)
, else
(5)
where
R
inc/dec
and
R
scale
are fixed parameters in PBAS. R_lower is the lower bound of
R
(
x
i
)
. In PBAS,
R_lower is a fixed parameter which is set to 18. The other parameter is learning rate
T
(
x
i
)
. The PBAS
method defines the updating rules of T
(
x
i
)
as follows:
T
(
x
i
)
=
T
(
x
i
)
+ T
inc
/d
min
(
x
i
)
, if F
(
x
i
)
= 1
T
(
x
i
)
− T
dec
/d
min
(
x
i
)
, if F
(
x
i
)
= 0
(6)
where
T
inc
and
T
dec
are fixed parameters. The update speed of the background model is inversely
related with
T
(
x
i
)
. The range of
T
(
x
i
)
’s variation is specified by the PBAS method to prevent the
background model from being updated too quickly or too slowly.
剩余15页未读,继续阅读

weixin_38661100
- 粉丝: 6
- 资源: 904
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建Cadence PSpice仿真模型库教程
- VMware 10.0安装指南:步骤详解与网络、文件共享解决方案
- 中国互联网20周年必读:影响行业的100本经典书籍
- SQL Server 2000 Analysis Services的经典MDX查询示例
- VC6.0 MFC操作Excel教程:亲测Win7下的应用与保存技巧
- 使用Python NetworkX处理网络图
- 科技驱动:计算机控制技术的革新与应用
- MF-1型机器人硬件与robobasic编程详解
- ADC性能指标解析:超越位数、SNR和谐波
- 通用示波器改造为逻辑分析仪:0-1字符显示与电路设计
- C++实现TCP控制台客户端
- SOA架构下ESB在卷烟厂的信息整合与决策支持
- 三维人脸识别:技术进展与应用解析
- 单张人脸图像的眼镜边框自动去除方法
- C语言绘制图形:余弦曲线与正弦函数示例
- Matlab 文件操作入门:fopen、fclose、fprintf、fscanf 等函数使用详解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


