基于Lyapunov的轮式移动机器人姿态稳定控制技术
需积分: 0 102 浏览量
更新于2024-03-21
收藏 1.35MB DOCX 举报
本文提出了基于运动学Lyapunov的轮式移动机器人姿态稳定控制器。文章共收到了2019年6月3日修订版并于2019年8月17日接受,于2019年8月20日在线发布,关键字包括移动机器人、差动轮式机器人、姿势稳定和机器人运动学。研究提出了两种非平稳运动学控制策略,用于差分驱动轮式移动机器人的姿态稳定,方法基于运动坐标转换和类Lyapunov稳定性技术。控制定律的提出可以渐进地将系统稳定在所需目标上,并提供两种不同的操作方法。进一步地,文章对所建议的算法进行了仿真比较,并修改了控制规则以解决机器人避开障碍物时的姿势避障问题,仿真结果和实验测试证明了技术的有效性。
轮式移动机器人在工业、交通和安全等领域中有着广泛的应用前景,而该技术的发展也受到了广泛的关注和投资。针对WMR的运动控制问题,主要可以分为轨迹跟踪、路径跟踪和点稳定等三大类。本文着眼于解决WMR的姿态稳定问题,通过运动学Lyapunov控制器来优化控制策略,提高机器人的稳定性和操作性。
文章的主要贡献在于提出了基于运动学Lyapunov的控制定律,通过运动坐标转换和Lyapunov稳定性技术,实现了对姿态稳定的控制。所提出的控制策略能够使系统逐渐稳定在目标状态,并提供了两种不同的操作方式,极大地提高了机器人的操作灵活性和稳定性。与此同时,研究还对所提议的算法进行了仿真比较,确保了方法的有效性和可靠性。
此外,为了进一步解决机器人在避开障碍物时所需的姿态问题,研究进行了控制规则的修改,以提高机器人的避障能力。通过仿真实验和实际测试,研究证明了所提出技术的有效性和实用性,为轮式移动机器人的姿态稳定控制提供了一种新颖且有效的方法。
综上所述,基于运动学Lyapunov的轮式移动机器人姿态稳定控制器为解决WMR的姿态稳定问题提供了一种有效的解决方案,通过提出的控制定律和修改的规则,实现了对机器人稳定性和避障能力的提升。未来,该技术有望在工业生产、自动化领域等方面发挥重要作用,为WMR的应用和发展提供新的思路和方法。
假设该变量
c
w
是一个非零且有界的变量,则得出 ,现在仅需要找到适当的角速
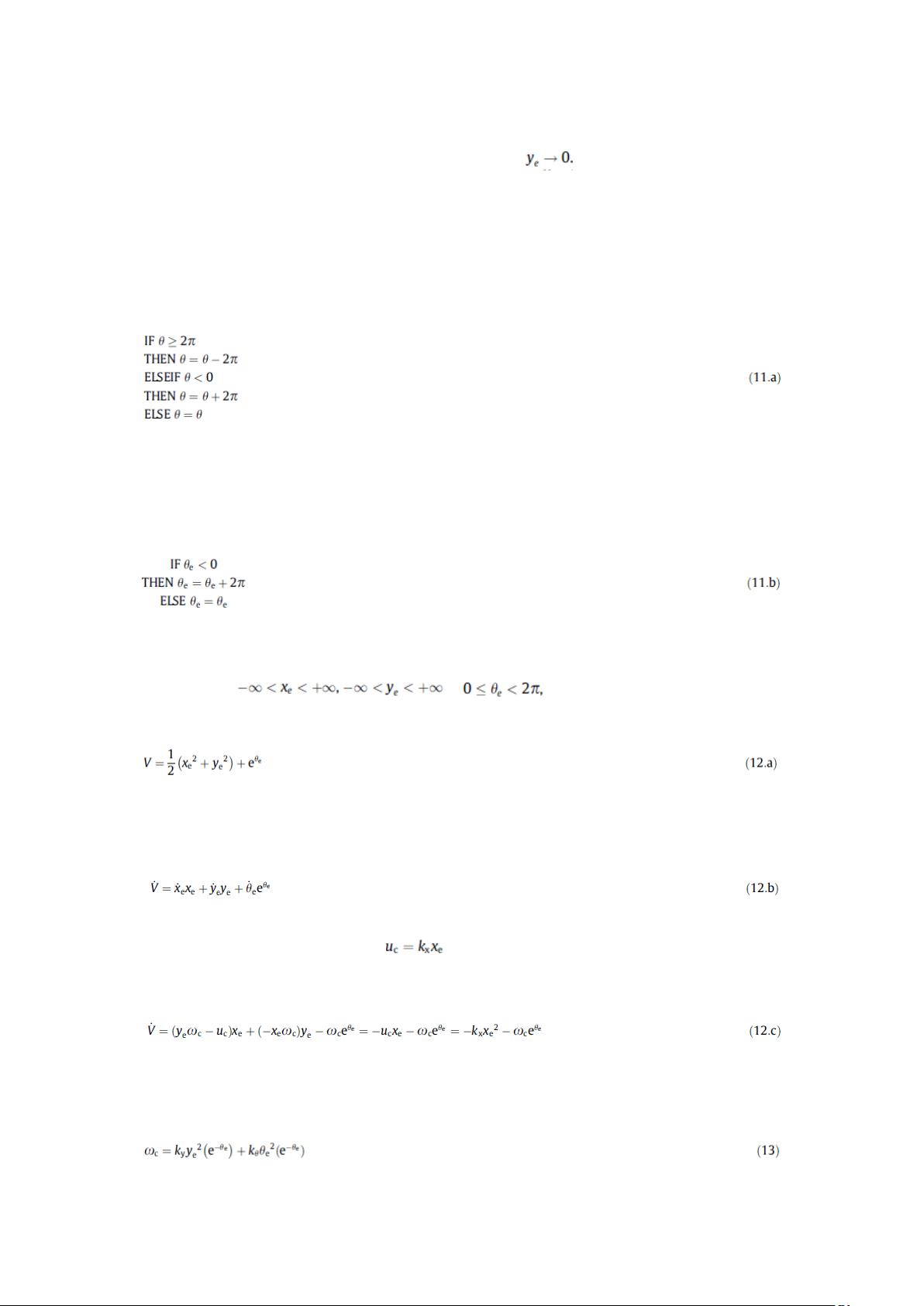
度,该角速度应满足其边界约束,通常,机器人的方向是具有 2pi 个周期的周期变量,因此,
可以在[0,2pi)间隔内限制此方向,而无需对整个问题进行任何更改,应当针对实际方向
和所需方向进行此修改,这个想法来自于以下事实:在实验测试中,以(-pi,pi]域为界的 Atan2
函数用于评估机器人的方向,因此,可以轻松描述机器人的实际方向,在实践中以[0,2pi)
间隔,下面的关系将机器人的方向映射到上述边界。
同样,这种转换也可以在参考资料中看到[23],根据等式(5)和等式中的映射(11.a),
方向误差限制在(-2pi,2pi)间隔内,由于方向误差与机器人的方向相同,是具有 2pi 个周
期性的周期性变量,因此可以用[0,2pi)间隔来描述,此转换可以通过以下关系进行:
为了找到合适的角速度,在等式中定义了类似 Lyapunov 的函数(12.a),这是下界,并
且配置错误在 和 范围内时,功能的下限是 1。
前述函数的导数在等式中定义(12.b):
考虑等式(7),(8),(9) 和,Lyapunov-like 函数的导数可以写成等式
(12.c),
如果按如下方式选择角速度:
剩余20页未读,继续阅读
点击了解资源详情
点击了解资源详情
2021-01-13 上传
2021-03-20 上传
2021-05-30 上传
2021-03-29 上传
2021-01-14 上传
2021-05-28 上传

乔木Leo
- 粉丝: 29
- 资源: 301
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
