FANUC机器人系统关键设置与DeviceNet配置详解
版权申诉
70 浏览量
更新于2024-07-20
1
收藏 1.69MB PDF 举报
FANUC机器人系统知识学习手册深入探讨了FANUC机器人在工业应用中的关键要素,特别是焊接领域的技术要点。首先,章节一着重于外部轴参数设置,这些参数包括电机型号(如AIF8、AIF12、AIF22)、放大电流(40A、80A)、电机转速(3000rpm)、外部轴类型(集成直线轴和旋转轴)、运动方向设定、最大速度限制(直线轴500mm/s,旋转轴20°/s),以及减速比(根据不同系统定制)。其中,motorSign属性与直线轴联动相关,定义了电机自身的旋转方向,同时提供了软限位参数(upperlimit和lowerlimit)用于安全操作。
外部轴的零点位置(masterposition)以及加速度设置(acceltime1、acceltime2和minimumacceltime)对于确保机器人精确运动至关重要。负载系数(loadratio)和轴放大参数(axisampnumber、axisamptype)也对机器人性能有直接影响。对于与旋转轴联动的设备,如servooffenable的启用、servoofftime的设置,以及expfilervalid的有效性等,都需按照特定规则进行配置。
第二部分是FANUC DeviceNet IO配置说明,这是实现设备间通信的重要环节。该部分详细列出了所需硬件组件,如FANUC的DeviceNet接口板、R-J3iC控制柜、DeviceNet接口设备,以及所需的连接线材(包括WAGO750-34和其他配件)。此外,强调了系统软件DeviceNetInterface(J753)的安装和使用,以及如何通过DeviceNet网络连接各个设备,确保数据的可靠传输。
整个学习手册涵盖了从基础参数设置到高级网络配置的全面内容,旨在帮助用户深入理解FANUC机器人的工作原理,提升其在焊接等应用中的操作效率和精度。通过掌握这些知识,技术人员可以更好地维护、编程和优化FANUC机器人系统,以适应现代制造业的需求。
5
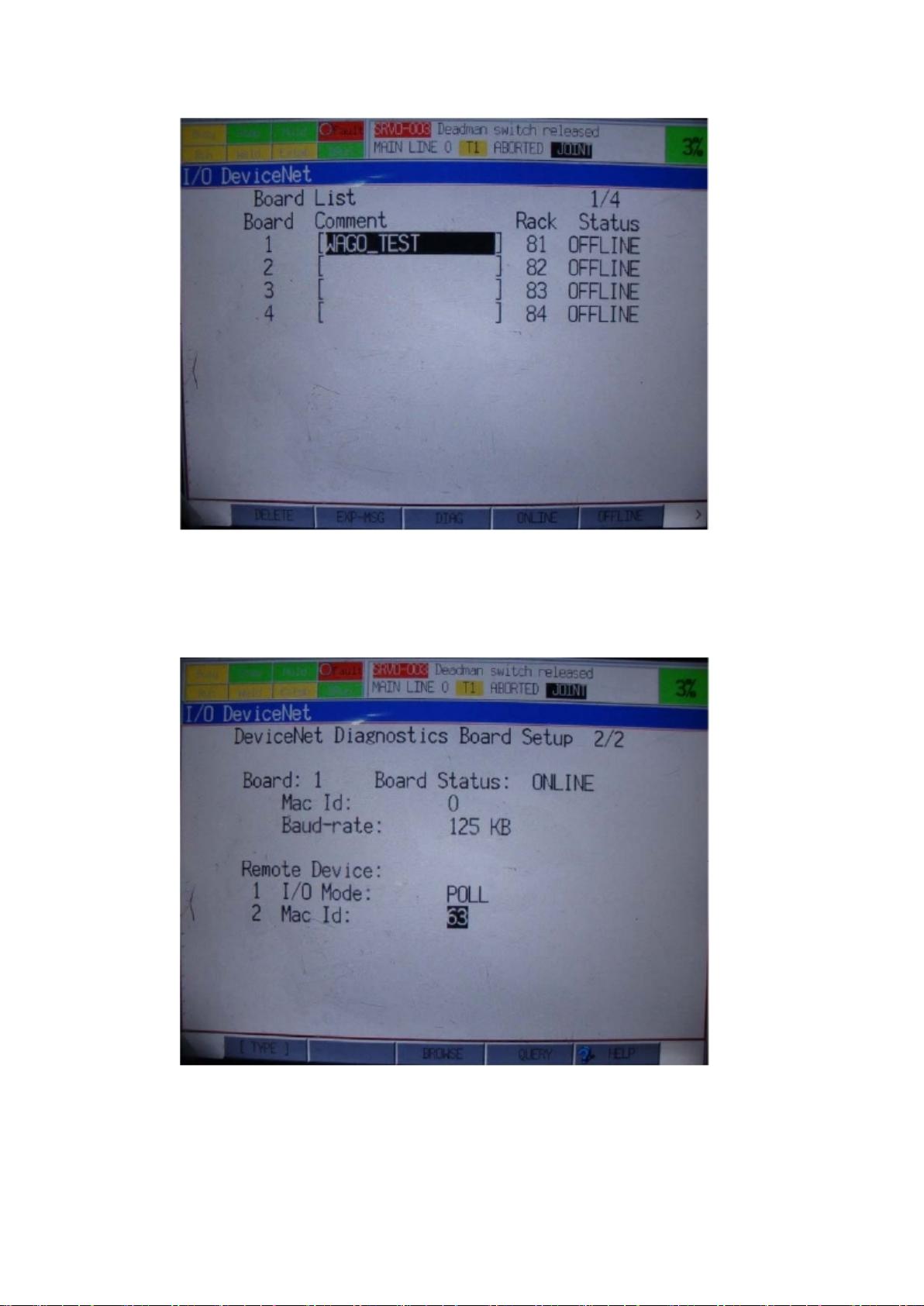
图 4. 激活 DeviceNet 接口卡
b 板卡激活后,按DIAG键进入诊断界面,开始寻找外部I/O设备。如果不确定外部设备的
MAC地址,就击BROWSE键可以自动寻找外部设备。
图5 。 诊断界面
剩余24页未读,继续阅读
2022-06-30 上传
2022-06-04 上传
2022-06-06 上传
2022-06-30 上传
2021-10-05 上传
2019-09-19 上传

AAA_自动化工程师
- 粉丝: 6873
- 资源: 3415
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
