VL53L0X:最小型ToF距离与手势传感器,2018年生产数据
需积分: 2 62 浏览量
更新于2024-07-14
收藏 1.01MB PDF 举报
VL53L0X是一款高度集成的微小型测距和手势识别传感器,由世界领先的制造商生产。这款产品在2018年4月进入全面生产阶段,文档编号为DocID029104Rev2。该传感器设计紧凑,尺寸仅为4.4x2.4x1.0毫米,适合于空间有限的应用场景。
核心特性包括:
1. 集成度高:VL53L0X集成了940纳米激光垂直腔面发射器(VCSEL)、驱动器、先进的内置微控制器和测距传感器,显著简化了系统设计。
2. 快速精准测距:它能够测量最长可达2米的绝对距离,且测距结果不受目标反射率影响,确保了测量的准确性。
3. 光学交叉Talk补偿:先进的补偿技术有助于简化盖板玻璃的选择,减少了外部光学元件的需求,提高了集成度和性能。
4. 安全合规:作为一款符合最新IEC 60825-1:2014第三版标准的1类激光设备,VL53L0X在使用过程中保证用户安全。
5. 易于集成:作为单个可回流焊接组件,无需额外光学器件,仅需单一电源供电。它提供I2C接口便于设备控制和数据传输,还配备了X shutdown(重置)和中断GPIO,以及可编程的I2C地址,方便用户灵活配置。
应用领域广泛,涵盖了:
- 个人电脑、笔记本和平板电脑的用户检测,特别注重节能。
- 机器人技术,用于障碍物检测,提升机器人的自主性。
- 白色家电,如自动水龙头和皂液器中的手部检测,提高用户体验。
- 1D手势识别,为交互界面提供新的输入方式。
VL53L0X以其小巧的体积、精确的测距能力、低功耗设计和丰富的接口选项,成为各种智能设备和物联网应用的理想选择。其在工业、消费电子和智能家居等领域展现了强大的适应性和广泛应用潜力。
DocID029104 Rev 2 7/40
VL53L0X Overview
37
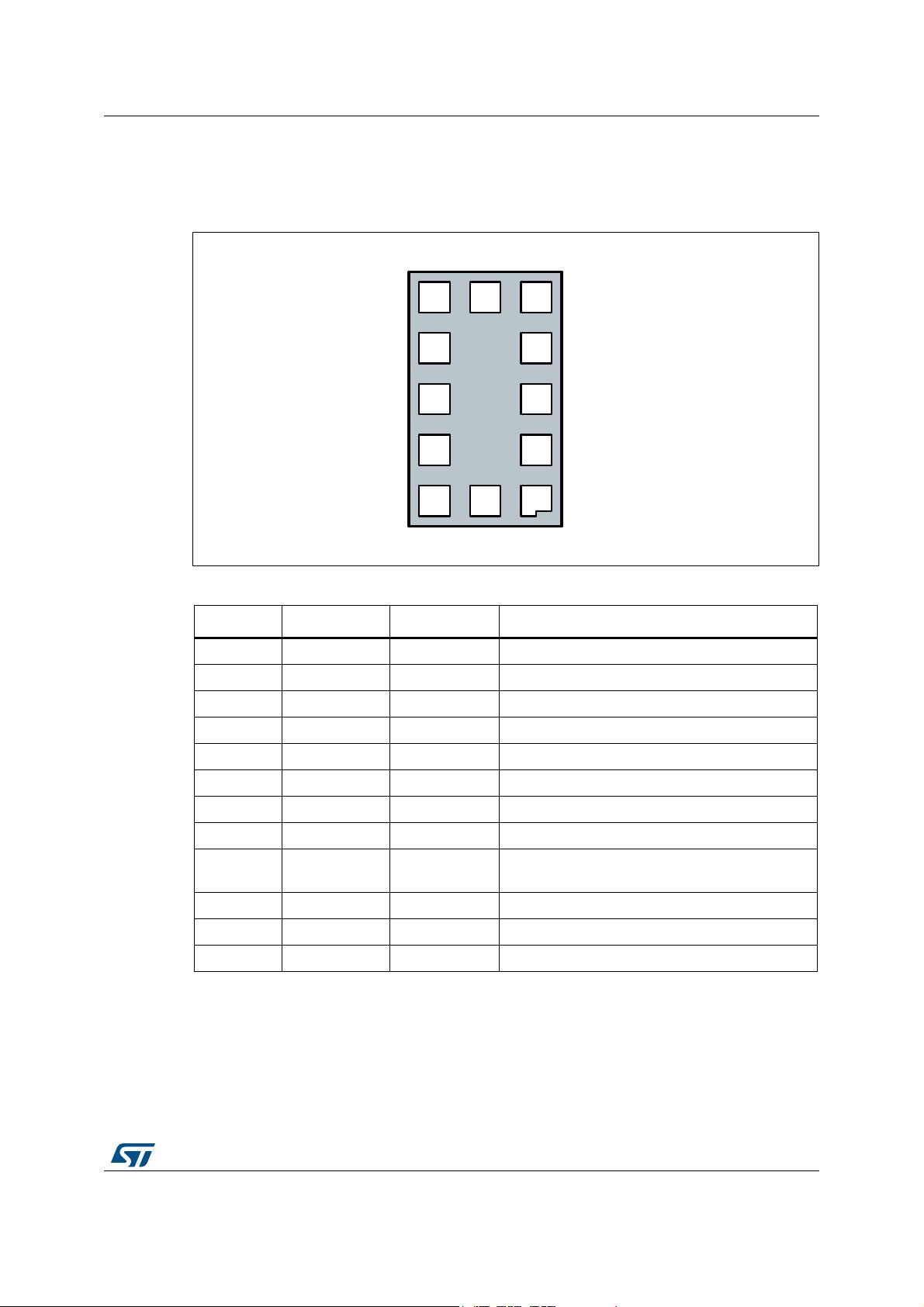
1.3 Device pinout
Figure 2 shows the pinout of the VL53L0X (see also Figure 22).
Figure 2. VL53L0X pinout (bottom view)
Table 2. VL53L0X pin description
Pin number Signal name Signal type Signal description
1 AVDDVCSEL Supply VCSEL Supply, to be connected to main supply
2 AVSSVCSEL Ground VCSEL Ground, to be connected to main ground
3 GND Ground To be connected to main ground
4 GND2 Ground To be connected to main ground
5 XSHUT Digital input Xshutdown pin, Active LOW
6 GND3 Ground To be connected to main ground
7 GPIO1 Digital output Interrupt output. Open drain output.
8 DNC Digital input Do Not Connect, must be left floating.
9SDA
Digital
input/output
I
2
C serial data
10 SCL Digital input I
2
C serial clock input
11 AVDD Supply Supply, to be connected to main supply
12 GND4 Ground To be connected to main ground
$9''9&6(/
$9669&6(/
*1'
*1'
;6+87
$9''
6&/
6'$
'1&
*3,2
*1'
*1'
剩余39页未读,继续阅读
2020-03-11 上传
2023-07-28 上传
2023-06-02 上传
2023-07-12 上传
2023-09-17 上传
2023-05-30 上传
2023-07-10 上传

plm4662694
- 粉丝: 0
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- Postman安装与功能详解:适用于API测试与HTTP请求
- Dart打造简易Web服务器教程:simple-server-dart
- FFmpeg 4.4 快速搭建与环境变量配置教程
- 牛顿井在围棋中的应用:利用牛顿多项式求根技术
- SpringBoot结合MySQL实现MQTT消息持久化教程
- C语言实现水仙花数输出方法详解
- Avatar_Utils库1.0.10版本发布,Python开发者必备工具
- Python爬虫实现漫画榜单数据处理与可视化分析
- 解压缩教材程序文件的正确方法
- 快速搭建Spring Boot Web项目实战指南
- Avatar Utils 1.8.1 工具包的安装与使用指南
- GatewayWorker扩展包压缩文件的下载与使用指南
- 实现饮食目标的开源Visual Basic编码程序
- 打造个性化O'RLY动物封面生成器
- Avatar_Utils库打包文件安装与使用指南
- Python端口扫描工具的设计与实现要点解析
