Webots初学者指南:创建第一个机器人模型
需积分: 9 152 浏览量
更新于2024-07-23
1
收藏 1.5MB PPTX 举报
"Webots是一个强大的机器人仿真软件,它允许用户创建、编程和模拟各种机器人。本教程将引导你逐步创建你的第一个机器人模型——一个单臂机械手,并编写其控制器来实现基本动作。
首先,创建一个新的项目。在Webots中,你需要新建一个名为`robotArm`的文件夹,这将是你的项目存储位置。通过向导菜单选择‘新项目’,并确保选中`robotArm`作为工作目录。接下来,设置场景的基础环境,例如添加光源。你可以添加一个`PointLight`节点来照亮你的仿真空间。
进入模型构建阶段,利用插入工具栏在`Solid`节点后面增加`robot`节点。`robot`节点包含多个属性,最重要的是其`Children`子节点,用于添加各种功能的组件。在`Children`中,你将添加一个`Servo`节点,它代表一个可控制的关节。`Servo`节点还可以包含`Transform`节点,用于调整物体的位置和方向。在`Transform`下,进一步添加`Shape`节点,接着是`Geometry`节点,这里我们选择`box`节点,以创建一个立方体形状,代表机械手的一部分。
通过修改`Box`的尺寸,可以定制立方体的大小,从而塑造出单臂机械手的外形。接下来,你可以通过调整`Transform`的`Translation`属性来改变立方体(即机械手部分)在场景中的位置,以完成基本的机械手布局。
创建机器人控制器是Webots的一个关键特性。你可以从C、C++、Python、Java或Lua五种编程语言中选择一种,为你的机器人编写控制器。为控制器命名,例如`robotArm.c`,确认后,Webots会自动生成相应的源代码文件。删除预置的注释,然后开始编写你的第一个程序,比如打印"HelloWorld"。保存并编译代码,点击“是”以运行。此时,你会看到"HelloWorld"的程序运行结果。
为了给机械手增加动作,你可以参考Webots的帮助文件中的示例代码,逐步实现更复杂的控制逻辑。这可能涉及到对`Servo`节点的控制,改变其位置或旋转角度,以模拟机械手的动作。
通过这个简单的教程,你已经掌握了Webots的基本操作,包括创建项目、构建机器人模型和编写控制器。继续学习和实践,你将能够创建更加复杂的机器人系统,并进行真实的物理行为模拟。"
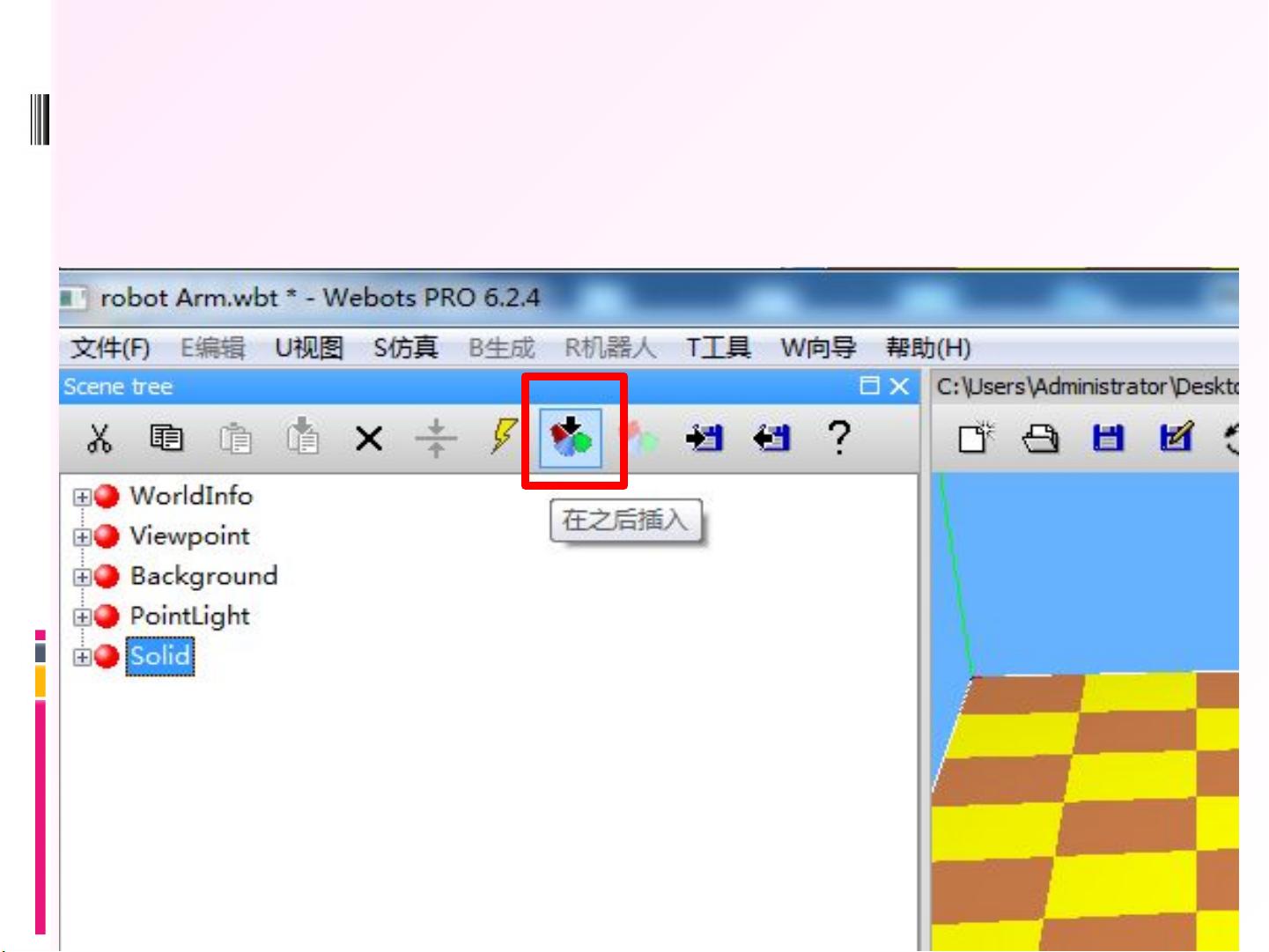
在 Solid 后面点击插入工具栏
剩余29页未读,继续阅读
2018-10-18 上传

caichangliang007
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Direct3D9初级教程
- EXT中文手册,学习ext的好帮手
- 信息资源管理新技术信息网格
- 国外信息资源管理的前沿理论研究
- BlackBerry 应用程序开发者指南-高级
- BlackBerry应用程序开发者指南
- Oracle8i_9i数据库基础
- 中断与异常……66666
- 基于窗函数的FIR滤波器
- 使用ActionScript3.0组件.pdf
- Linux操作系统下C语言编程入门
- 实战windows+server+2008+企业版WEB服务器环境的配置.pdf
- EXCEL里使用SQL的方法.txt
- 算法:分枝界限法.doc
- java中log4j的扩展写法
- ActionScript 3.0 语言和组件
