自由曲面照明光学设计综述:突破传统,推动工程发展
需积分: 10 112 浏览量
更新于2024-07-15
收藏 7.48MB PDF 举报
"《自由曲面照明光学设计》是一篇关于新兴技术——自由形式光学的综述文章,该技术正在推动照明设计领域的革新。传统的光学设计受到表面几何形状的限制,而自由形式光学则打破了这种束缚,使得设计师和工程师能够创造出更紧凑、轻便且效率高的照明系统,同时保持卓越的光学性能。本文的焦点在于自由形式照明光学设计,这是推动照明工程发展的重要驱动力。
设计方法主要分为两大类:一类是基于理想光源假设的零固有通量算法,如射线映射法、 Monge-Ampère 方程方法以及支撑二次曲面方法。这些算法强调了对理想光源的理想化处理,旨在实现最优化的光线分布和控制。
另一类是针对扩展光源的设计算法,这类方法考虑到了实际光源的特性,如大小、形状和发射特性。这些算法更加注重如何在复杂场景中有效分布和控制光线,以满足不同应用场景的需求,比如在照明、投影、成像等领域的实际应用中。
学习和实践自由形式照明光学设计,不仅需要掌握理论基础,还要灵活运用各种设计工具和软件,如光场模拟软件、非球面加工技术等。此外,随着技术的发展,新型材料和制造工艺也对设计提出了更高的要求。对于刚入门的光学工程师来说,通过不断学习、交流和实践,可以在这个领域不断成长,共同推进照明技术的进步。
本文提供了一个全面的视角,适合照明设计初学者参考,同时也为深入研究者提供了丰富的研究资源和实践指导。阅读和研究这篇论文,有助于理解和掌握自由形式照明光学设计的关键技术和策略,为未来的照明工程设计创新奠定坚实的基础。"
www.advancedsciencenews.com www.lpr-journal.org
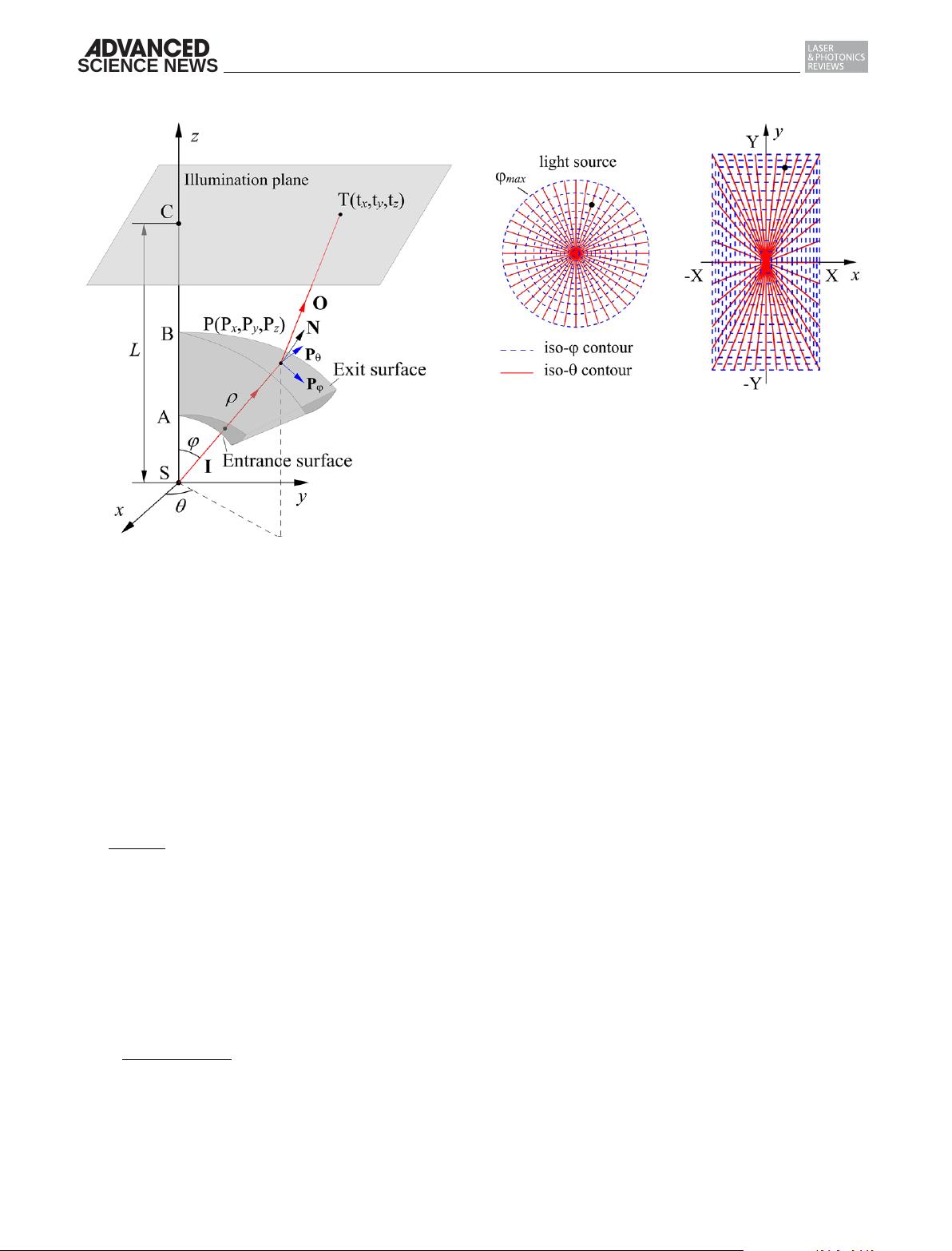
Figure 2. Geometrical design layout of the freeform lens.
the entrance surface, the unit vector of the incident ray can be
written as
I =
(
sin ϕ cos θ,sin ϕ sin θ,cos ϕ
)
(1)
Then, we know that the position vector of point P is given by
P = ρ × I (2)
Taking the first partial derivative of P with respective to θ and ϕ
yields two tangent vectors at point P along θ and ϕ directions. The
cross product of these two tangent vectors gives us the normal to
the freeform surface at point P, which can be written as
N =
P
ϕ
× P
θ
P
ϕ
× P
θ
(3)
where P
ϕ
and P
θ
are the two tangent vectors at point P. We as-
sume that O is the unit vector of the outgoing ray. It is apparent
that the three vectors I, O and N should obey Snell’s law, which
means the three vectors should satisfy Equation (4)
O = nI + P
1
N (4)
where n is the refractive index of the freeform lens and the pa-
rameter P
1
is given by
P
1
=
1 − n
2
+ n
2
(
I · N
)
2
− n
(
I · N
)
Here, the black dot in the equation above denotes the dot prod-
uct of two vectors. Equations (3) and (4) show clearly that the three
components of O given by Equation (4) are functions of ρ, θ , ϕ,
Figure 3. A variable separation mapping. A prescribed uniform rectangu-
lar illumination is defined on the domain [−X, X] × [−Y, Y ]. X = 5 mm, Y =
10 mm and the lighting distance between the source and the illumination
plane equals 10 mm. The refractive index of the lens equals 1.59. The light
rays from a Lambertian point source are directed by the freeform lens to
produce the prescribed illumination.
ρ
θ
and ρ
ϕ
.Hereρ
θ
and ρ
ϕ
are the first-order derivatives of ρ with
respective to θ and ϕ. It should be noted that ρ
θ
and ρ
ϕ
are also
the functions of ρ, θ and ϕ. After we calculate the vector O,we
can get the x and y coordinates of point T, t
x
and t
y
. Likewise, t
x
and t
y
are also functions of ρ, θ, ϕ, ρ
θ
and ρ
ϕ
. We assume that t
x
and t
y
can be written as
t
x
= f
1
ρ,θ,ϕ,ρ
θ
,ρ
ϕ
t
y
= f
2
ρ,θ,ϕ,ρ
θ
,ρ
ϕ
(5)
Equation (5) tells us that the location of the intersection point
of the outgoing ray on the illumination plane is fully determined
by the surface profile. Solving Equation (5) for ρ
θ
and ρ
ϕ
gives us
ρ
θ
and ρ
ϕ
ρ
θ
= g
1
ρ,θ,ϕ,t
x
, t
y
ρ
ϕ
= g
2
ρ,θ,ϕ,t
x
, t
y
(6)
Since t
x
and t
y
are functions of θ and ϕ, the two partial
differential equations in Equation (6) become solvable only if
the relationship between point T and the vector I is known.
That is to say we need to choose a ray mapping which specifies
where an incident ray should go after refraction by the freeform
lens. Choosing a ray mapping is the key step in the ray mapping
method.
[50,51,54]
A ray mapping can be determined by the conser-
vation law of energy and this usually yields an infinite number
of possible ray mappings. An easy mapping to compute (but that
will not lead to a desirable solution) is obtained if a separation
of variables is applied.
[50,51,54]
Figure 3 gives a variable separation
mapping used to design a freeform lens which produces a uni-
form rectangular illumination on a target plane. The ray mapping
Laser Photonics Rev. 2018, 1700310
C
2018 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim1700310 (4 of 18)
剩余17页未读,继续阅读
186 浏览量
108 浏览量
166 浏览量
2023-06-13 上传
168 浏览量
220 浏览量
106 浏览量
303 浏览量
171 浏览量

right_and
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高质量C++编程指南
- Web信息系统中基于RBAC模型
- 基于角色访问控制基于角色访问控制
- 深入浅出ARM7-LPC213x_214x(下).
- LINGO基本用法指南
- 深入浅出ARM7-LPC213x_214x(上)
- matlab命令大全
- a semantic web primer
- Cadence 应用注意事项
- java编码规范(试行版)
- oracle rac技术
- Modeling the Internet and the Web: Probabilistic Methods and Algorithms
- Struts framework的工作原理和组件Struts framework的工作原理和组件
- Spring AOP面向方面编程原理Spring AOP面向方面编程原理
- IOC详解IOC详解IOC详解IOC详解
- 大公司的Java面试题集大公司的Java面试题集
