CNet:提升语义分割准确性的上下文感知网络
41 浏览量
更新于2024-08-26
收藏 402KB PDF 举报
"CNet:用于语义分割的上下文感知网络"
本文介绍了一种名为CNet(Context-Aware Network)的新型深度学习模型,专门针对计算机视觉中的语义分割问题。语义分割是一项复杂的任务,它要求算法能够精确地识别图像中的每个像素所属的类别,这对于自动驾驶、图像分析和医疗影像诊断等领域至关重要。尽管深度卷积神经网络(DCNNs)在图像识别和分类等任务中表现出色,但在处理语义分割时,往往难以捕捉到足够的上下文信息,这会导致对象边界识别不准确。
CNet的核心创新在于其特征收集模块(FCM)和ResGate层。FCM设计用于通过不同大小的接受域捕获丰富的低级上下文特征,这些特征包括纹理、布局、边界、局部和全局的关系。这些特征对于理解图像的结构和内容至关重要,能够补充高层特征的学习,从而提升模型对细节的理解能力。另一方面,ResGate层则是一个新颖的层次结构,它的目的是从FCM提取出的大量特征中选择最稳定的上下文信息。通过这种方式,ResGate层有助于过滤掉噪声,保留有助于精确分割的重要信息。
在实际应用中,CNet的这种深度上下文探索能力对于区分相似物体或处理复杂场景特别有益。例如,在图像中存在多个相似颜色或形状的对象时,CNet能够更好地理解它们之间的关系,从而更准确地进行分割。作者在PASCAL VOC2012数据集上验证了CNet的有效性,这是一个广泛使用的语义分割基准,包含多个类别的复杂图像。实验结果表明,CNet相比于其他相关方法,特别是在处理相似物体和复杂背景时,表现出了优越的性能。
CNet的贡献不仅在于提出了一种新的上下文感知网络结构,还在于它为解决语义分割中的边界问题提供了一个有效方案。这种上下文信息的深入利用对于进一步推动深度学习在语义分割领域的进展具有重要意义。此外,CNet的设计理念和实现方式也为其他计算机视觉任务提供了有价值的参考,如目标检测和实例分割等。
CNet通过引入FCM和ResGate层,显著增强了深度学习模型在处理语义分割时获取和利用上下文信息的能力,从而提高了分割的精度,特别是在处理复杂和具有挑战性的图像时。这项研究为未来的研究者提供了一种新的工具和思路,以应对计算机视觉中的语义分割挑战。
CNet: Context-Aware Network for Semantic Segmentation
Rongliang Cheng
1
, Junge Zhang
2, 3
, Peipei Yang
3
, Kangwei Liu
4
, Shujun Zhang
1
1
College of Information Science & Technology, Qingdao University of Science and Technology
4
FF & LeFuture AI Institute
2
CRIPAC &
3
NLPR, Institute of Automation, Chinese Academy of Sciences (CASIA)
chengrongliang@hotmail.com, jgzhang@nlpr.ia.ac.cn, ppyang@nlpr.ia.ac.cn, liukangwei@le.com, zhangsj@qust.edu.cn
Abstract—Semantic segmentation is one of the great
challenges in computer vision. Recently, deep convolutional
neural networks (DCNNs) have achieved great success in
most of the computer vision tasks. However, in terms of
semantic segmentation, it is still difficult for the DCNN
methods to take full advantage of context information and
determine the fine boundaries of objects. In this paper, we
propose a Context-aware Network (CNet), which utilizes
robust context information to improve segmentation results.
CNet has two significant components: 1) a feature collec-
tion module (FCM), which is constructed to extract low-
level contextual features including texture, layout, boundary,
local and global relationships by different receptive fields
to complement high-level feature learning, and 2) a novel
layer named ResGate, which is developed to select robust
contextual features from the FCM. The two combined
components can thoroughly explore context information to
improve boundary segmentation accuracy. We evaluate the
proposed method on the popular PASCAL VOC2012 dataset,
and obtain promising performance compared with related
methods, especially in the situation of similar objects or
objects in complex scene.
Keywords-Semantic Segmentation; CNN; Contextual Fea-
ture;
I. INTRODUCTION
In this paper, we address the problem of semantic seg-
mentation for natural images. The semantic segmentation
task is an instance of dense prediction, and its goal is
to compute a discrete or continuous semantic label for
each pixel in the image. This task is both fundamental and
of great importance to a variety of computer vision tasks
ranging from traditional tasks such as tracking and motion
analysis, medical imaging, structure-from-motion and 3D
reconstruction, to modern applications like autonomous
driving, mobile computing, and image-to-text analysis.
Recently, deep learning has achieved tremendous suc-
cess in image classification [1] [2] [3] [4] and object
detection [5]. This huge success has received much high
attention due to the efficient feature extraction methods of
deep convolutional neural networks (DCNNs) [2] [6] [7].
DCNN has strong ability to capture high-level visual
features for visiual tasks, and this motivates exploring the
use of DCNN for pixel-level labeling problems.
Fully convolutional network (FCN) [8] achieves
significant accuracy by adapting convolutional neural
network(CNN)-based image classifiers to semantic seg-
mentation task, and has become the most popular approach
to dense prediction tasks. Many methods have been pro-
posed to further improve this framework. For example,
deeplab [9] refines feature extracted by CNNs with the
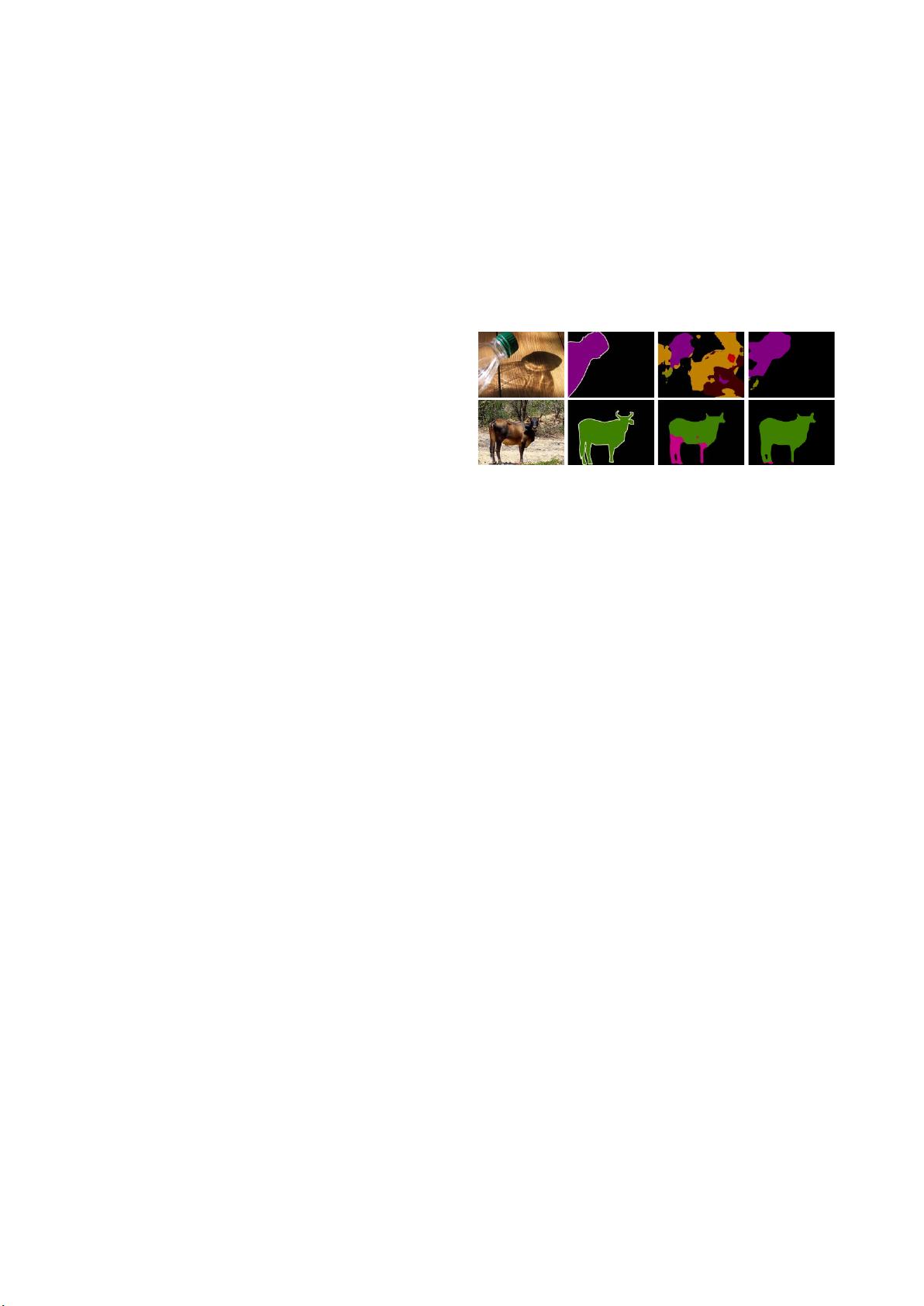
(a) Image (b) GT (c) Deeplab (d) CNet (ours)
Figure 1. Illustration of sample failure cases on the validation set
of the Pascal VOC 2012 dataset using the most popular deeplab
method (VGG-16). In the first row, most of the bottle is cropped,
so the segmentation result displays plenty of noises. In the second
row, a part of the cow is labeled as a horse. We also show the
results of our proposed CNet in the last column.
help of pairwise similarities between pixels based on loca-
tion and color features. This method uses the feature maps
of classification networks with an independent conditional
random field (CRF) based post-processing technique [10].
Zheng et al. [11] combine deep learning and CRF pairwise
inference as a sequence of operations through end-to-end
training. This approach improves the accuracy of FCN and
simplifies the additional operation with regard to the in-
dependent post-processing CRF. Further studies [12] [13]
on learning deconvolutional networks have tremendously
benefited from the recovery of input image resolution, and
even deeper convolutional neural networks [14] [15] sub-
stantially improve the segmentation benchmark. Despite
the success of these methods, the semantic segmentation
task still faces many difficult problems, especially when
considering complex scenes and multiple objects. One
example is shown in the first row of Figure 1. The bottle is
hard to be recognized because the majority of its parts or
regions are hidden or cropped. Another difficult example
is shown in the second row of Figure 1. The legs of
the cow are highly likely to be labeled as horse because
the bodies of the cow and horse are similar. Generally,
the segmentation task will be more challenging when the
object is situated in complex scenes or has an appearance
similar to other categories. As a result, bad or erroneous
segmentation results occur. In this paper, we argue that
these problems can be addressed by incorporating local
and global context information. Taking Figure 1 as an
example, a part of the bottle is cropped and the shadow
of the bottle is regarded as an object. In the second
row, the legs of the cow are labeled as horse. However,
2017 4th IAPR Asian Conference on Pattern Recognition
2327-0985/17 $31.00 © 2017 IEEE
DOI 10.1109/ACPR.2017.31
67
下载后可阅读完整内容,剩余5页未读,立即下载
2018-09-28 上传
2024-10-31 上传
2023-04-02 上传
2023-05-18 上传
2023-05-21 上传
2023-07-20 上传
2024-10-30 上传
2023-07-16 上传

weixin_38674223
- 粉丝: 3
- 资源: 951
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
