智能汽车摄像头内参标定与程序调试详解
版权申诉
148 浏览量
更新于2024-06-28
收藏 1.43MB PPTX 举报
"该资源是一个关于智能汽车装配与调试的PPT,主要讲解了摄像头内参标定的过程和程序调试步骤。"
智能汽车装配与调试的过程中,摄像头内参标定是至关重要的一步,它涉及到车辆安全行驶的基础——准确的视觉感知。摄像头内参标定旨在消除摄像头成像过程中的几何畸变,提升图像质量和定位精度。以下是详细的摄像头内参标定的解析:
首先,标定原理基于棋盘格图案,通常使用棋盘坐标系,其中XP轴指向右边,YP轴指向下方,原点位于棋盘左上角。通过检测棋盘角点,可以计算出摄像头的内部参数,如焦距、主点坐标等。棋盘格的尺寸通常以格数表示,这有助于在计算中建立棋盘上的参考点。
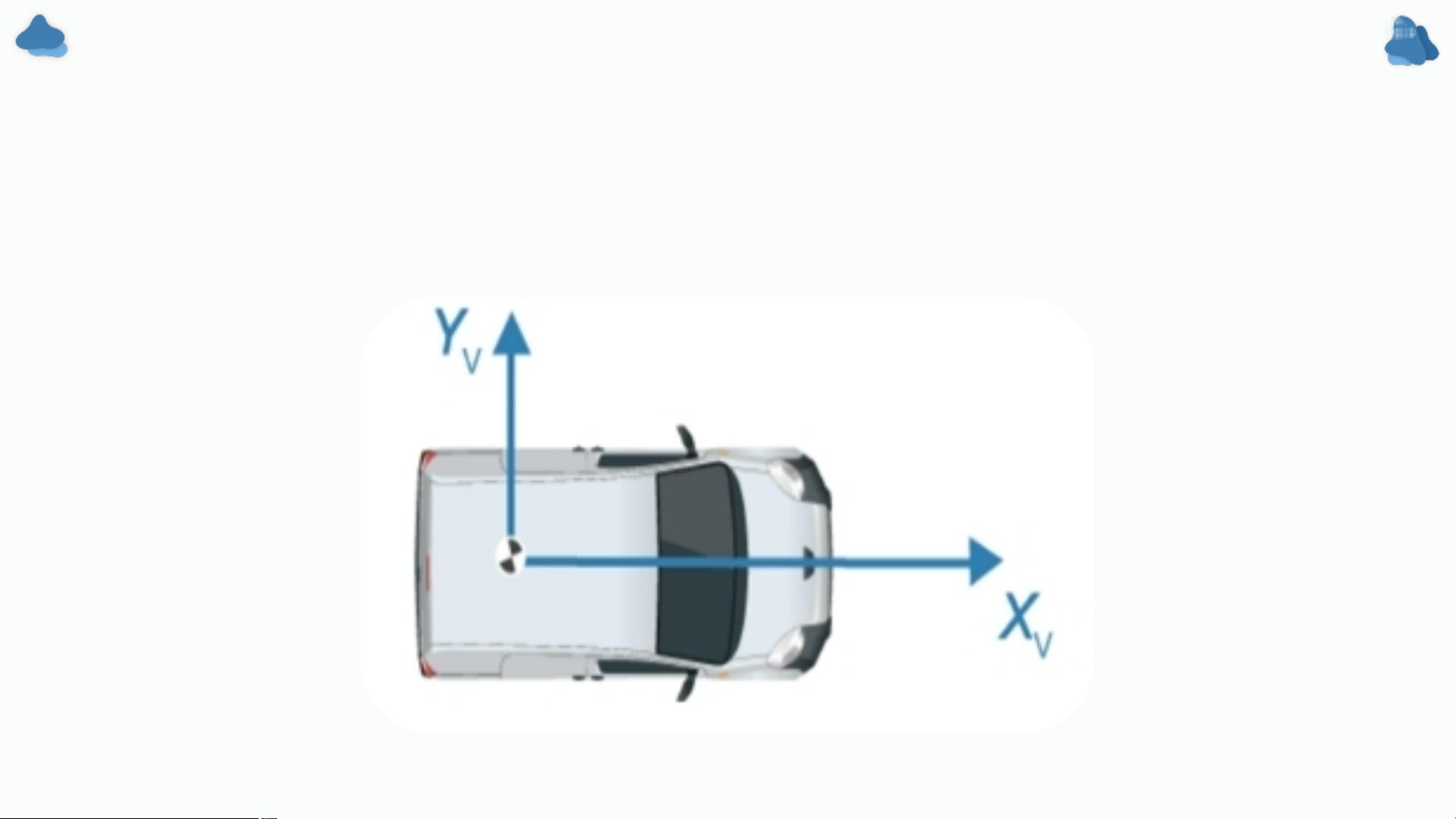
车辆坐标系是另一个关键概念,Xv轴向前,Yv轴向左,原点位于道路表面,直接位于摄像头下方。在标定过程中,需要将棋盘坐标系与车辆坐标系对齐,确保测量的准确性。
标定过程分为水平和垂直两个方向。水平方向标定确保摄像头捕获的道路图像与实际道路平行,垂直方向标定则确保图像的垂直线与实际道路的垂直线一致。这两个方向的标定结合,可以校正摄像头的倾斜和扭曲。
小孔成像原理是标定的基础理论,通过计算光线通过小孔形成的投影角度,可以推算出实际世界中物体的位置和距离。在摄像头内参标定中,利用这一原理可以求解出未知的几何参数。
程序调试部分涉及具体的实施步骤。车辆需停放在车道线中间,车道线应为实线且长度、线宽符合标准,以便提供可靠的参考标记。在调试时,需使用笔记本电脑连接到路由器,登录FieldHelper软件,并输入摄像头设备的IP地址进行连接。一旦连接成功,可以进行设备安装和后续的参数调整。
智能汽车的摄像头内参标定是一项精细的工作,它确保了摄像头能准确地捕捉和解析周围环境,为自动驾驶系统提供可靠的数据支持。通过严格的标定和调试流程,可以提高智能汽车的行驶安全性和性能。
一、摄像头内参标定原理
车辆坐标系如下图所示,Xv轴从车辆向前指向,Yv轴指向左方。从正面看,原点位于道
路表面,直接位于摄像头焦点下方。当放置棋盘格时,XP轴和YP轴必须与车辆的Xv轴和Yv
轴对齐。
图 车辆坐标系
剩余24页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
180 浏览量

知识世界
- 粉丝: 375
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- frontend_engineers_must_know:使用Vanilla Javascript构建的辅助项目
- sota-onboarding:使用Heroku云平台的最先进的检测和入门应用程序
- matlab代码sqrt-R-spaceship-tracking:利用预测控制模型(可以实施)跟踪漂移的飞船,以证明基本控制系统
- PhoDibaLab_REM_HiddenMarkov模型:在Kamran Diba实验室对2021年冬季我的轮换做的分析
- Python-Kmeans
- matlab数据读入和fft变换程序简单实用
- 友基手写板驱动 v1.4.0 最新版
- hai_vu78,matlab实训 源码,matlab源码之家
- 的words:一个本机应用程序,可尝试使用NativeScript-Vue构建的what3words API
- drag-n-drop-taskboard:https
- 学习技术
- matlab有些代码不运行-KCF:“带内核相关过滤器的高速跟踪”的源代码
- sipml5-master.zip
- 简洁购物商城.zip
- moviedatabase
- jei_jn36,matlab中的fit函数源码,matlab源码网站
