鲁棒控制理论基础与信号范数解析
需积分: 11 167 浏览量
更新于2024-07-29
收藏 1.76MB PPT 举报
"鲁棒控制理论基础"
鲁棒控制理论是一种在自动控制领域中至关重要的概念,它旨在解决系统在面临不确定性因素时仍能保持稳定性和性能的问题。鲁棒控制的研究始于20世纪50年代,主要关注的是设计出能够在模型参数变化、噪声干扰、系统非线性以及外部环境变化等不确定条件下,仍然能够有效工作的控制器。
设计鲁棒控制系统通常包括以下步骤:
1. 建立被控系统的数学模型,并对其进行简化,以便于分析。
2. 分析模型,了解其动态特性,如稳定性、响应速度等。
3. 根据系统性能需求,定义性能指标和控制器类型。
4. 选择合适的控制理论进行控制器设计,如H∞控制、Lyapunov稳定性理论、线性矩阵不等式(LMI)等。
5. 通过计算机仿真或物理实验验证控制器的效果。
6. 如果仿真结果不满意,需要反复调整和优化设计。
7. 最后,选择合适的硬件平台和编写控制软件,将控制器实际应用到系统中。
稳定鲁棒性是指即使在存在不确定性的情况下,闭环系统仍能保持稳定;而性能鲁棒性则是指在保持系统稳定的同时,确保某些性能指标(如稳态误差、响应速度等)在可接受的范围内。
鲁棒控制理论的文献资源丰富,例如:
1. Zhou, Doyle 和 Glover 的《鲁棒与最优控制》(中译本:周克敏),
2. Green 和 Limebeer 的《线性鲁棒控制》,
3. Doyle, Francis 和 Tannenbaum 的《反馈控制理论》,
4. 俞立的《鲁棒控制—线性矩阵不等式处理方法》。
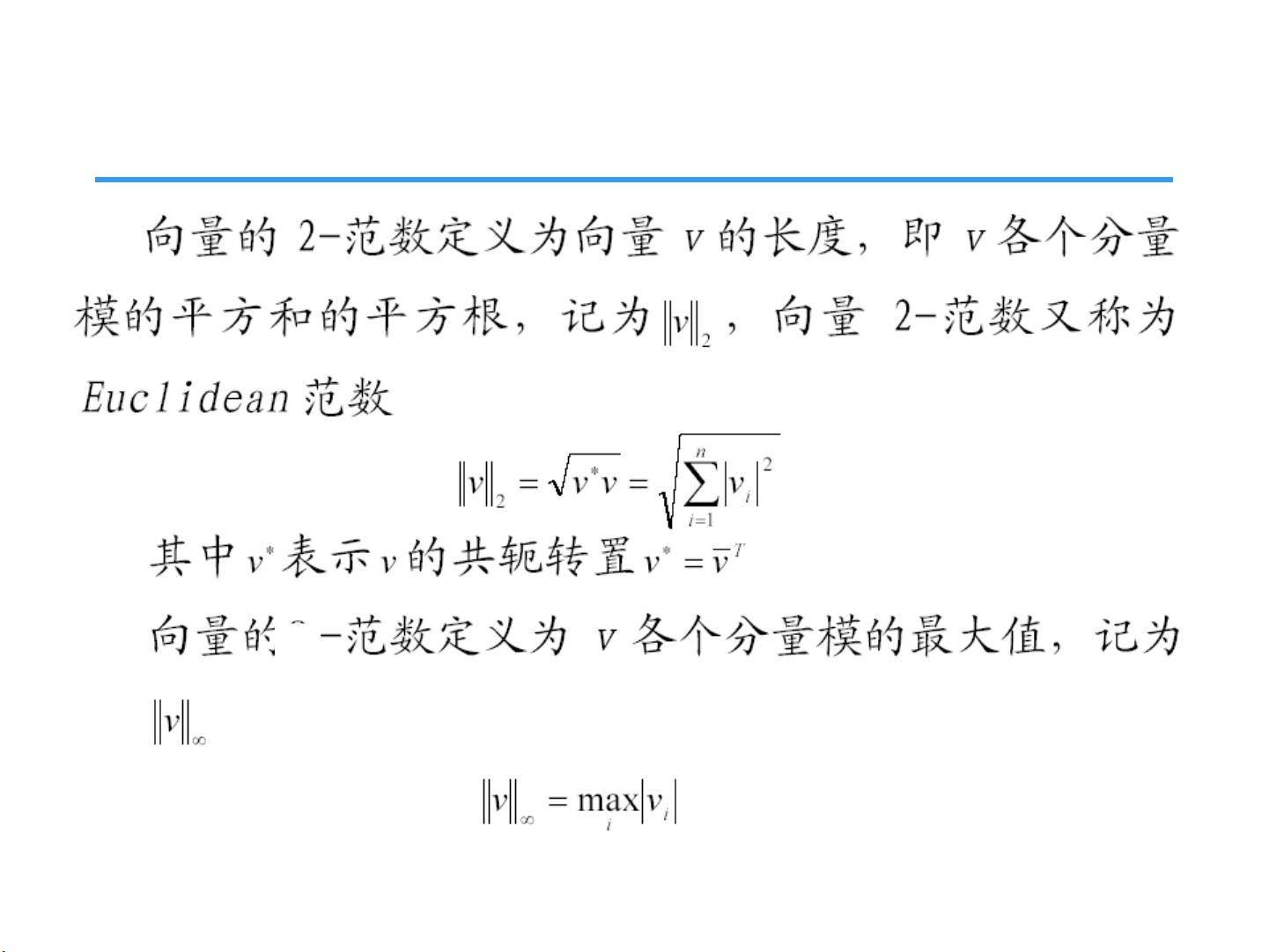
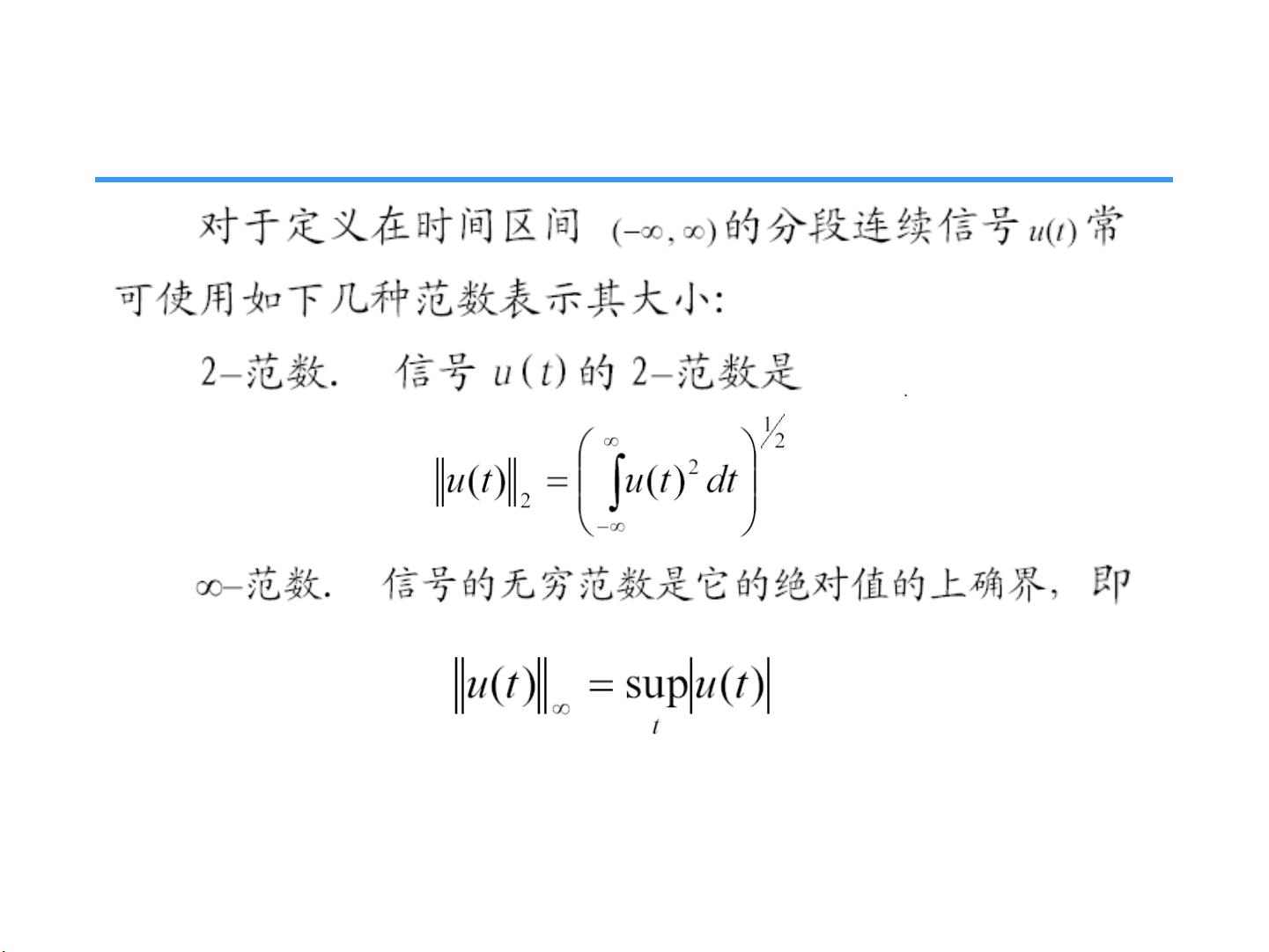
在深入探讨鲁棒控制时,会涉及信号和系统的范数,这是衡量信号大小和系统性能的重要工具。信号的范数可以用来定量表示信号的能量或幅度,而系统增益和系统范数则用于评估系统的放大能力和稳定性。这些概念在控制器设计中扮演着关键角色,因为它们帮助我们量化系统在不同条件下的行为,从而能够设计出能够在各种不确定性下保持性能的鲁棒控制器。
Fang Hua-Jing , HUST 2010
8
剩余41页未读,继续阅读
682 浏览量
131 浏览量
155 浏览量
247 浏览量
225 浏览量
365 浏览量
432 浏览量
2024-10-26 上传
331 浏览量

seasideboy6
- 粉丝: 0
- 资源: 21
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小波功率谱用于降水、气温等的周期分析
- MPC模型预测控制-欠驱动船舶.zip
- torch_sparse-0.6.4-cp36-cp36m-linux_x86_64whl.zip
- vitamincalculator:给出不同维生素的计算器限制并计算您的每日剂量
- SteamAuth:NodeJS Steam身份验证器,登录和交易确认
- dkreutter.github.io
- Implementation-of-Graph-kernels:阅读有关图核的调查而编写的代码
- labelImgPackage.rar
- 公司营业室主任行为规范考评表
- torch_cluster-1.5.5-cp38-cp38-linux_x86_64whl.zip
- postnet-version-1.1B
- beavisbot:适用于plug.dj和dubtrack.fm的由node.js驱动的机器人
- FSDI103PROJECT2
- 导航菜单可拖动
- 编译so文件 Unity调用so文件样例
- 行政支援课课长
