嵌入式Linux倒车影像系统开发与超声波驱动实践
需积分: 0 27 浏览量
更新于2024-08-03
5
收藏 4.13MB PDF 举报
本资源是一个关于Linux驱动开发的教程,特别关注一个倒车影像项目的实现。这个项目涉及到在嵌入式Linux环境下集成不同的硬件组件,包括LCD屏幕、摄像头、超声波传感器(用于倒车雷达)以及蜂鸣器,以创建一个功能完整的倒车辅助系统。通过该项目,开发者可以学习如何编写PWM驱动来控制蜂鸣器,实现超声波驱动以测量障碍物距离,并处理摄像头的实时视频流显示。
在倒车影像项目中,LCD屏幕用于实时显示摄像头捕获的图像,摄像头安装在车尾,负责捕捉车后的情况。倒车雷达采用超声波测距技术,测量车与障碍物之间的距离。蜂鸣器则根据雷达测得的距离调整其频率,提供声音反馈。硬件连接方面,超声波传感器的ECHO引脚连接到开发板的GPX1_0中断引脚,用于检测回波;TRIG引脚连接到GPB_7,用作输出触发信号。
在软件实现上,超声波驱动程序使用了多种Linux内核头文件,如`<linux/kernel.h>`、`<linux/module.h>`等,以实现设备驱动的基本功能,包括文件操作、内存管理、中断处理和时间管理。中断号存储在`distance_irq`变量中,而`distance_time_us`则记录了超声波往返所需的时间,用于计算距离。项目中还使用了工作队列来处理中断事件,确保非阻塞的异步操作。
驱动程序的核心部分包括初始化、发送超声波脉冲、接收回波并计算距离的过程。在中断处理函数中,程序会读取GPB DAT和CON寄存器来获取超声波传感器的状态,然后根据接收到的回波时间计算出实际距离。此外,驱动程序可能还需要处理中断注册、设备注册、设备文件操作(如read、write、ioctl)以及设备的打开和关闭等常规任务。
通过这个项目,开发者可以深入理解Linux驱动开发的各个环节,包括硬件接口的抽象、中断处理机制、工作队列的运用以及设备驱动的生命周期管理。这对于任何希望在嵌入式系统领域从事Linux驱动开发的工程师来说,都是一个宝贵的学习案例。
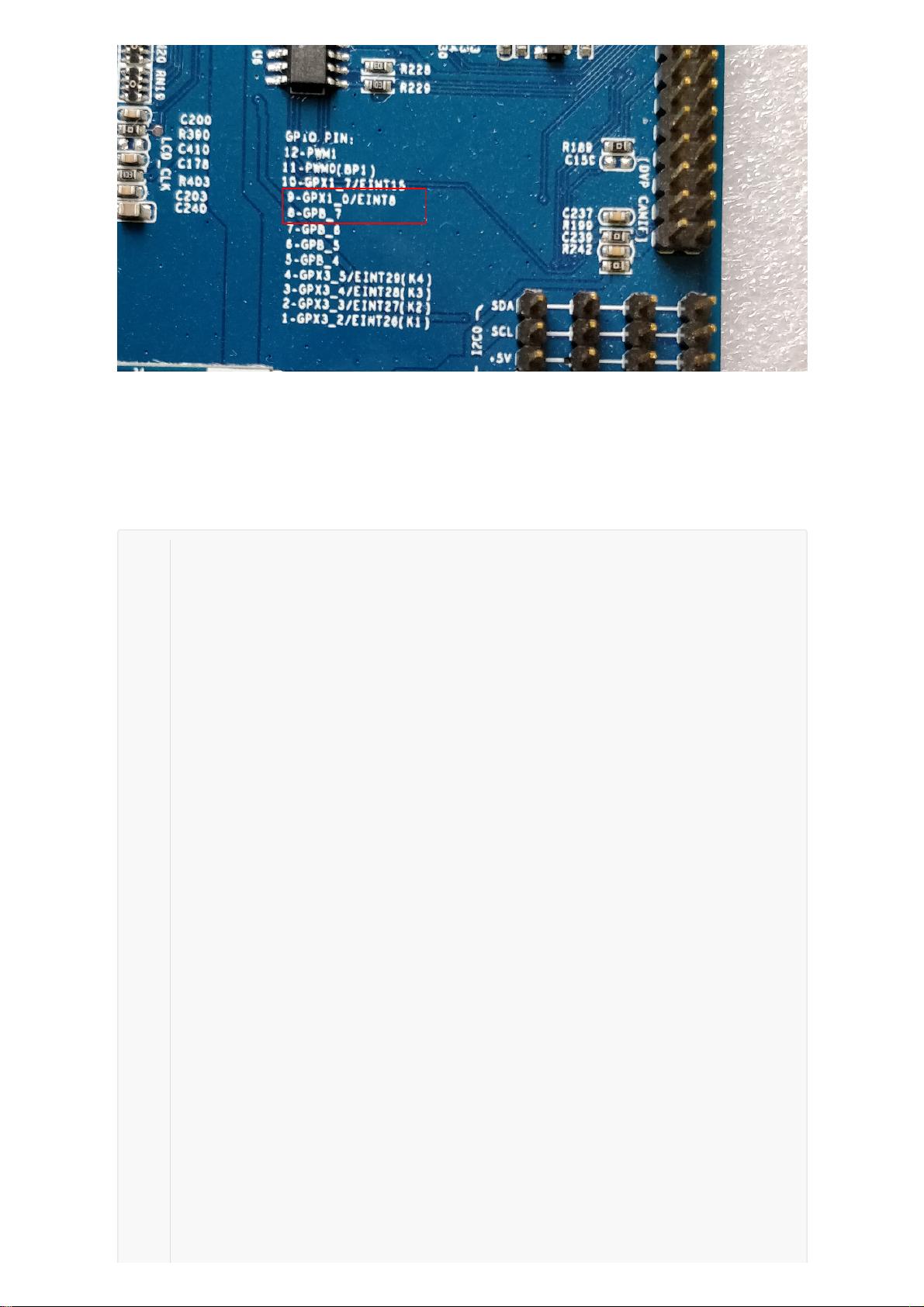
ECHO------->GPX1_0 (开发板第9个IO口): 中断引脚----->检测回波----输入
TRIG ------->GPB_7 (开发板第8个IO口): 输出触发信号。
超声波驱动读取距离:
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/miscdevice.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include <linux/irq.h>
#include <linux/delay.h>
#include <linux/workqueue.h>
#include <linux/gpio.h>
#include <mach/gpio.h>
#include <plat/gpio-cfg.h>
#include <linux/timer.h>
#include <linux/wait.h>
#include <linux/sched.h>
#include <linux/poll.h>
#include <linux/fcntl.h>
#include <linux/interrupt.h>
#include <linux/ktime.h>
static unsigned int distance_irq; /*存放中断号*/
static u32 *GPB_DAT=NULL;
static u32 *GPB_CON=NULL;
static u32 distance_time_us=0; /*表示距离的时间*/
/*
工作队列处理函数:
*/
static void distance_work_func(struct work_struct *work)
{
u32 time1,time2;
time1=ktime_to_us(ktime_get()); /*获取当前时间,再转换为 us 单位*/
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
剩余13页未读,继续阅读
2022-04-30 上传
2023-07-10 上传
490 浏览量
250 浏览量
1260 浏览量
1189 浏览量
点击了解资源详情
1255 浏览量

DS小龙哥
- 粉丝: 5w+
- 资源: 910
 我的内容管理
展开
我的内容管理
展开







